1
Изобретение относится к области машиностроения, в частности к устройствам автоматического управления гидравлическими ковочными прессами.
Из основного авт. св. № 409&98 известно устройство для управления гидравлическим ковочным прессом, содержащее датчики положения подвижной траверсы пресса и датчик давления, соединенные с вычислительным устройством, а также компаратор, выход которого через усилитель и электромеханический преобразователь соединен с клапанным распределителем пресса, при этом датчики положения подвижной траверсы снабжены механизмами деления, а самоустрой;ство оснащено блоками автоматической проверки его функционирования, устройства автоматического переключения в режим работы с одним датчиком положения и автоматической установки нуля отсчета размера, подключенными на вход вычислительного устройства, один из выходов которого через блок автоматического контроля размера поковок соединен со входом логического элемента И, а также с блоком автоматического контроля перекоса подвижной траверсы пресса, соединенным
через инвертор со вторым входом логического элемента И и блоком оперативного перевода устройства в режим ручного управления, соединенный 5 через инвертор с третьим входом логического элемента И, четвертый вход которого соединен с блоком автоматической проверки функционирования устройства, выход которого соединен с одним из входов блока согласования, воздействующего на выходной усилитель устройства, а второй вход блока согласования соединен с логическим элементом нуль-орган, входы
15 которого связаны с вычислительным устройством и функционгшьным преобразователем, соединеным с датчиком скорости, предусмотренным в устройстве ,
20 Недостатками данного устройства является снижение точности автоматического регулирования перебегом траверсы по скорости из-заприменения аналогового датчика скорости (тахо25 генератора), снижение помехоустойчивости из-за потерь полезного сигнала на большом внутреннем сопротивлении датчика скорости, а также уменьшение надежности работы устройства
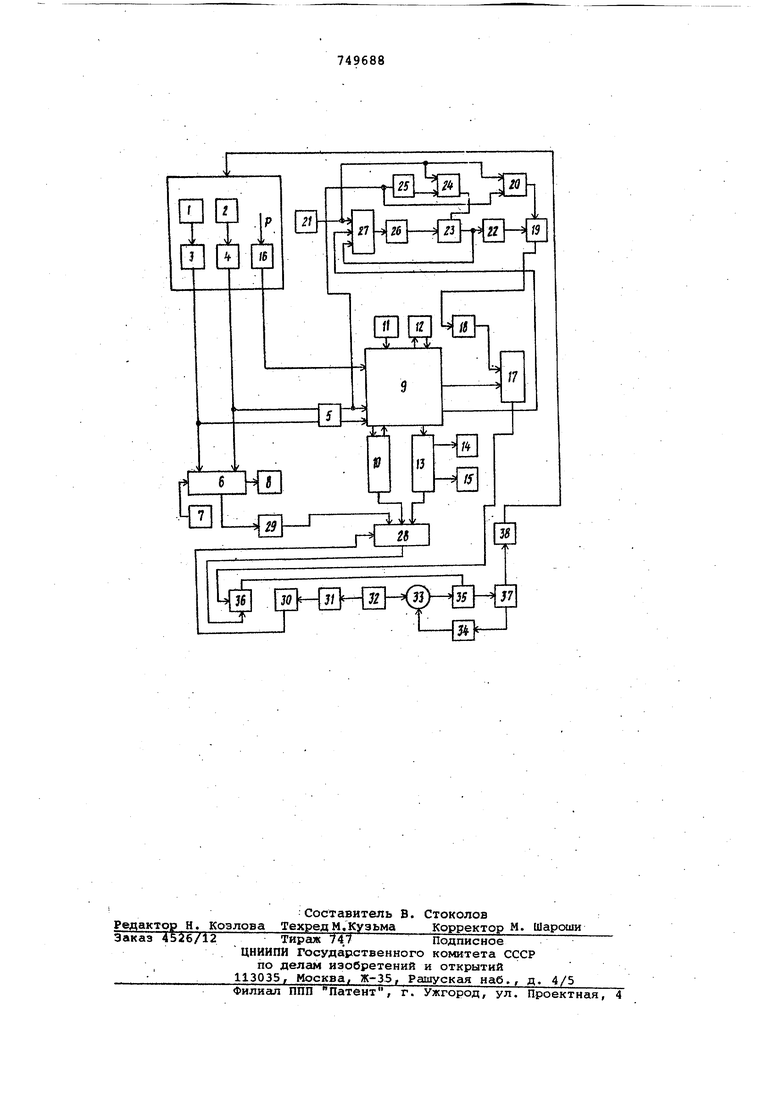
30 из-за наличия датчика скорости как электромеханического звена в цепи регулирования. С целью устранения указанных не достатков устройство снабжено счетчиком скорости и тремя дополнительными элементами И, а датчик скорости подвижной траверсы выполнен в виде регистра, генератора и де1 лителя опорной частоты и дешифратора, при этом счетчик скорости соединен - одним входом через делитель частоты с выходом первого дополнительного элемента И, соединенным одним входом со стабилизированным генератором опорной частоты, другим входом с выхо яом вычислительного устройства и тре,.тьим входом с выходом счетчика скорос ти , причем другой вход последнего под ключен к выходу второго дополнительного элемента И, один ; вход которого соединен с выходов генератора опорной, другой вход подключен через инвертор к блоку автоматического ..переключения врежим работы с одним дат .чиком, соединенному своим выходом с входом третьего дополнительного элемента И, другой вход которого соединен с генератором опорной частоты а выход подключен к регистру, другой вход которого соединен с выходом дешифратора, а выход регистра подключен к функциональному преобразователю. .На чертеже изображена функциональная схема устройства. Устройство для управления гидравлическим ковочным прессом состоит из датчиков 1, 2 положения подвижной тр версы пресса, связанных с траверсой .через механизм 3, 4. деления. Выходы датчиков положения подключены на вхо ды блока 5 автоматического переключения .устройства в режим работы с од ним датчиком положения и. блока б автоматического контроля перекоса подвижной траверсы пресс.а, соединенного с датчиком 7 величины допустимого пе рекоса и со световым транспарантом 8 Перекос. На входы вычислительног устройства 9 подключены следующие бл КИ блок 5 автоматического переключе ния устройства в режим работы с одни датчиком положения, блок 10 автоматической проверки функционирования устройства, блок 11 ввода входной информации, блок 12 автоматической у тановки нуля отсчета, блок 13 автоматического контроля размера поковки выходы которого подключены к транспа patrraM 14 Перекос и 15 Размер в допуске, датчик 16 упругой деформации деталей конструкции в процессе работы. На входы нуль-органа 17 подключены выход вычислительного устройств и выход функционального преобразователя 18, соединенного и регистром 19 скорости подвижной траверсы, на один вход которого подключен выход третье го дополнительного элемента И 20, оединенный с выходом стабилизированого генератора 21 опорной частоты выходом блока 5 автоматического пееключения Устройства в режим работы с дним датчиком положения.Другой вход егистра 19 скорости соединен с выхоом дешифратора 22,вход которого свяан с выходом счетчика 23 скорости, дин вход которого соединен ко второу дополнительному элементу 24 И, через инвертор 25 с блоком 5 автомаического переключения устройства .в режим работы с одним датчиком положения, а другой выход счетчика скорости 23 подключен через делитель 26 частоты к выходу первого дополнительного элемента 27 И, соединенного по выходам с генератором 21 опорной частоты, выходом вычислительного устройства 9 и выходом счетчика скорости 23. На входы основного элемента 28 И подключены выходы блока 10 автоматической проверки функционирования устройства, блока 13 автоматического контроля размера поковки- через инвертор 29 блок 5 автоматического контроляг перекоса траверсы и через инвертор 30 блок 31 автоматического перевода устройства в режим ручного управления. Выходы датчика 32 положения рукоятки ручного управления соединены с блоком оперативного перевода устройства в режим ручного управления и входом компаратора 33, другой вход которого соединен с блоком 34 обратной связи, а выход - с усилителем 35, другой вход которого подключен к блоку 36 согласования, а .выход - к электромеханическому преобразователю 37, с одной стороны связаны с блоком 34 обратной связи, а с другой - с управляющим клапанным распределителем 38 пресса. Устройство работает следукяцим образом. Перед началом ковки оператор опус3 аетподвижную траверсу. В момент скш-кания бойков , происходит запись величиныА. i.-:z . 2 2 о где А показание первого датчика 1положения подвижной траверсы;показание второго датчика 2положения подвижной траверсы. Величина Zo запоминается в блоке 12 и затем с помощью блока 11 задания производится ввод входной информации (задания) в вычислительное устройство 9. Во время рабочего хода.с датчиков 1 и 2 положения на входы вычислительного устройства 9 через блок 5 поступает информация о текущем положении подвижной траверсы пресса. Вычислительное устройство 9 производит опеЬации в соответствии с заланным-алгаритмом и выдает на первый вход нуль органа 17 напряжения разности . к 7 -7 I д-у+у +КР z. Zjga , где Кр - показания упругой деформации;Z - величина установки, нуля; Zjaj- величина задания. На выходе функционального преобразователя 18 появляется напряжение, про порциональное требуемому упреждению Напряжение упреждения формируется со ласно скорости движения траверсы, о ределяемой счетчиком 23 скорости, на счетный вход которого подается сигнал с выхода делителя 26 опорной час тоты соединенного с выходом первого дополнительного элемента 27 И, на один вход которой подается опорная частота, стабилизированного генератора 21 с момента поступления на друго вход сигнала разрешения с вычис11ител ного устройства 9 и отсутствия на третьем входе сигнала переполнения счетчика скорости, на другой вход ко торого подается сигнал разрешения счета и сброса счетчика 23 скорости в исходное состояние с выхода второго дополнительного элемента 24 И на один вход которого подается опорная частота стабилизированного генератора 21, а на другой вход поступае с блока 5 автоматического переключения в режим работы с одним датчиком сигнал кода младшего разряда датчика положения, который одновременно подается на вход третьего дополнительного элемента 20 И, на другой вход которой приходит опор-ная частота, ас выхода ее снимается сигнал записи в регистр 19 скорости на другой вход которого поступает через дешифратор 22 сигнал скорости из счетчика 23, а с выхода регистра 19 снимается сигнал пропорциональный скорости перемещения траверсы, посту пающий затем на вход функционального преобразователя 18, формирукадего зависимость f(U) величины упреждения от скорости траверсы пресса. При равенстве напряжения упреждения -f(U) и напряжения разности д нуль-орган 17 выдает сигнал на реверс, который поступает на один из входов блока 36 согласования, При наличии сигналов на всех входах блока 28 И на его выходе возникает напряжение, которое поступает на :второй вход блока 36 согласования и разрешает прохождение сигнала от ну.пь-органа- 17 на один из входов усилителя 35. При это выходное напряжение с блока 35 поступает на преобразователь 37, который, через клапанный распределитель 38 реверсирует направление движения траверсы. Выключение автоматического режима работы устройства производится в случаях: перекоса траверсы свыше значения заданного датчиком 7 не.исправности вычислительного устройства 9, перекова и отклонения рукоятки ручного управления от нейтрального положения. В режиме ручного управления напряжения с датчика 32 запрещает прохождение команды Реверс на усилитель через блок 31 оперативного перевода устройства в режим ручного управления, инвертор 30, логический элемент 28 И и блок 36 согласования. В этом случае управление приводом пресса производится от блока 32 положения рукоятки ручного управления через компаратор 33, усилитель 35 и электромеханический преобразователь 37. : Эффект от использования устройства для управления гидравлическим ковочным прессом обуславливается повышением точности и надежности работы, а также помехоустойчивости устройства. Формула изобретения Устройство для управления гидравлическим ковочным прессом по авт., свид. № 409898, отличающееся тем, что, с целью повышения точности, помехоустойчивости и надежности, оно снабжено счетчиком скорости и тремя дополнительными элементами И, а датчик скорости подвижной траверсы выполнен в виде регистра, генератора и делителя опорной частоты и дешифратора, при этом счетчик скорости соединен одним входом через делитель частоты с выходом первого дополнительного элемента И, соединенным одним входом со стабилизированным генератором опорной частоты, другим входом с выходом вычислительного устройства и третьим входом с выходом счетчика скорости, причем другой вход последнего подключен к выходу второго дополнительного элемента И,один вход которого соединен с выходом генератора опорной частоты, а другой вход подключен через инвертор к блоку автоматического переключения в режим работы-с одним датчиком, соединенному своим выходом с входом третьего дополнительного элемента И, другой вход которого соединен с генератором опорной частоты, а выход подключен к регистру, другой вход которого соединен с выходом дешифратора, а выход регистра подключен к функциональному преобразователю.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления гидравлическим ковочным прессом | 1983 |
|
SU1141020A1 |
| Устройство для управления гидравлическим прессом в режиме "шлихтовка | 1976 |
|
SU614975A1 |
| Аналого-цифровой преобразователь неэлектрических величин | 1985 |
|
SU1403374A1 |
| ИМИТАТОР УГЛА ПОВОРОТА АНТЕННЫ РЛС | 1987 |
|
SU1841003A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЭКСПЛУАТАЦИОННЫХ ПАРАМЕТРОВ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2107946C1 |
| Устройство для автоматического управления и регистрации скорости прессования гидравлического пресса | 1988 |
|
SU1590396A1 |
| Адаптивное устройство декодирования кода Манчестер | 1988 |
|
SU1640826A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2011 |
|
RU2494006C2 |
| Устройство для поиска кадров микрофильма | 1983 |
|
SU1111185A1 |
| Устройство для измерения параметров вращения ротора в переходных режимах | 1983 |
|
SU1352369A1 |