1
Изобретение относится к области транспортного машиностроения и, в частности, к конструкции шагающих многоонорных систем, предназначенных как для движения по труднопроходимым местам на земле, так и для космических аппаратов.
Известна шагающая опора, содержащая бедро, нижний конец которого цилиндрическим щарниром соединен с голенью, имеющей на Сбоем свободном конце опорную пяту, а верхний конец бедра при номощи сферического щарнира соединен с корпусом транспортного средства, причем голень и бедро снабжены приводами поворота, выполненными в виде установленных на корпусе транспортного средства гидроцилиндров }.
Недостатком данной шагающей опоры является малый диапазон углов поворота голени относительно бедра и бедра в двух взаимно перпендикулярных плоскостях, что снижает проходимость транспортного средства.
Наиболее близкой к изобретению по технической сущности и достигаемому результату является шагающая опора, содержащая бедро с нижним и верхним горизонтальны.ми шарнирами, к нижнему из которых присоединена голень с опорной пятой, а к верхнему - корпус двухстепенного шараира, вертикальная ось которого .жестко закреплена в раме транспортного средства, и индивидуальные приводы поворота корпуса двухстепенного шарнира, бедра и голени причем все приводы являются механизмами врашень-я, а привод поворота голени установлен на конце бедра в месте сочленения сто с бед ром 2.
Эта шагающая опора повыщает степень подвижности за счет увеличения диапазона изменения углов поворота голени и бедра, однако размещение привода поворота голени на бедре увеличивает его вес и момент 5 инерции, что вызывает необходимость, в увеличении мощности и веса привода, а также ухудшает динамические характеристики шагающей опоры, снижая ее быстродействие.
Цель изобретения - увеличение быстродействия путем уменьшения махового .момента.
Это достигается тем, что в опоре шагаюндего транспортного средства, содержащей бедро с нижним и верхним горизонтальными
mapiiHpa.MH, к finKHCMv из которых ;рисоединена голень с опорной пятой, а к верхнему -- корггус двухстепенного шарнипа, веоткка, ось которого жестко закреплена к раме Г;Л1нспортного средства, и нндиви;:уа..1ь;;:-/ приводы поворота корпуса двух(:ге; г-: г1--м-(; шарнира, бедра и голени, привод :,ic/bo,j/va голени установлен на корпусе двухстепенного шарьн-фн и соединен с голенью кинематической связью, а также тем, что указанная кинематическая связь выполнена ь виде гибкой, например, ценной передачи, зедуи.1,ее звено которой установлено соосно е верхним шарниром бедра, а ведомое соосно с его нижьим н арниром и жестко гфисоединеяо к голени.
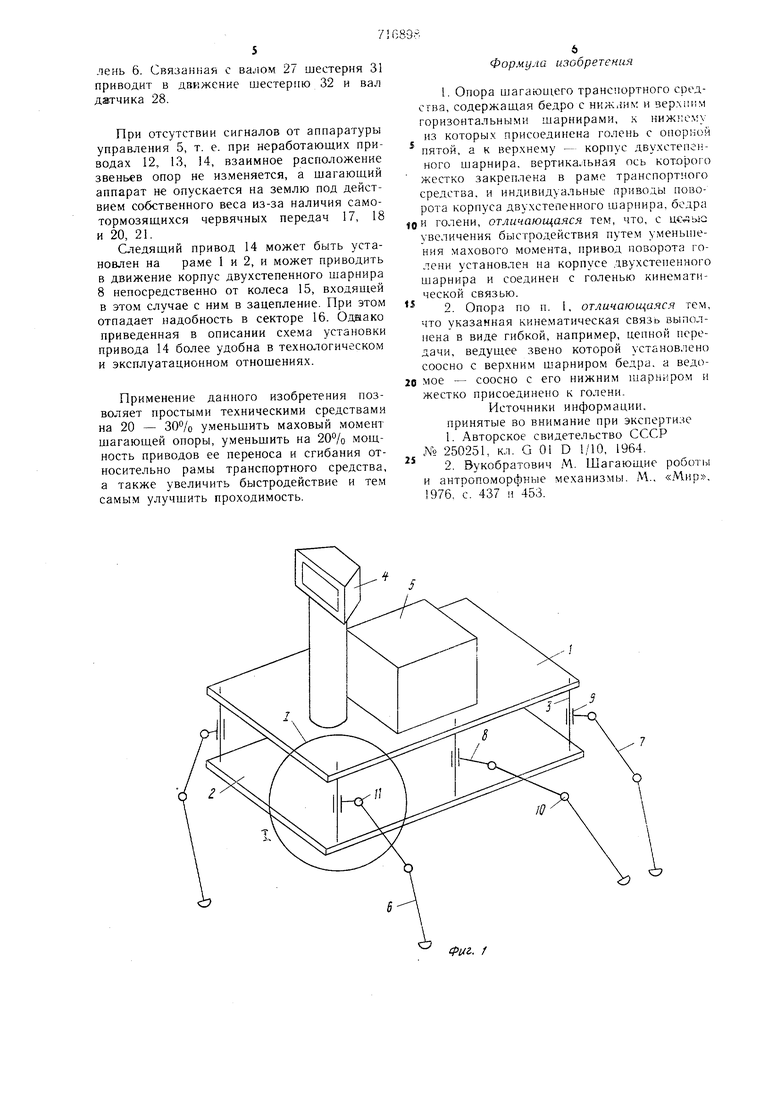
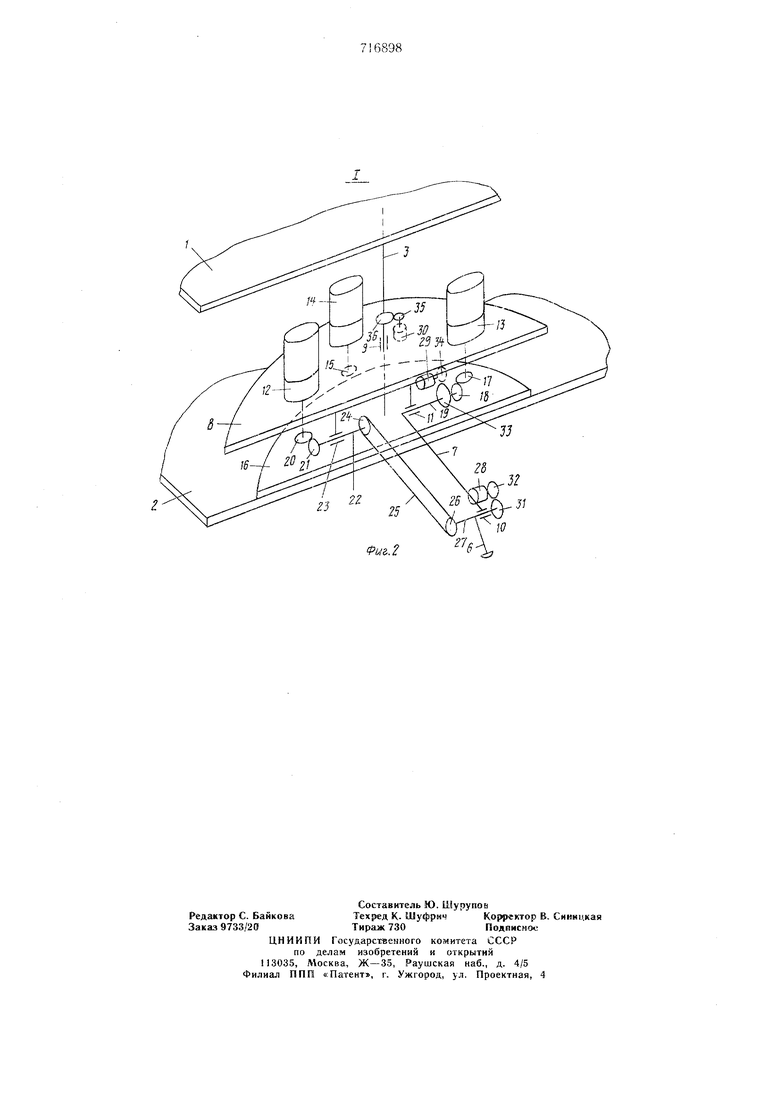
На фиг. 1 изображена общая кинематическая схема Eoaraioniero транспортного средства; на фиг. 2 - схе.матически похазааа предлагаемая шагающая опора (узел на фиг. 1).
Шйгаюн1ее транспортное средство состоит из корпуса, вьпюлненного в виде расположеннь;.к друг над другом рам i и 2. скрепленных между собой ося.ми 3. На верхней рчие 1 установлены лазерный дальнометр 4 и свнчанкая гибким кабелем со станионарной ЭВМ аппаратура 5, предназначенная д. преобразован} :; получаемой от дзл ючера -i информацьи к сигналы У1фазлен,;я опорагск «акгта. Каждая шагающая опора состоит из З-х звеньев: -олени 6, бедра 7 ; во ::олнс; 1;ого в вчде площадки корпуса 8 двухстепенного щарнира, которьй с HO.VJOщью под1 кпнкка 9 установлен на оси 3. Голень 5 и бедро 7 связаны между собой цилиндр|;чески.ч коленным щарниром 10, а бедро 7 к Kopriyc 8 -- цилиндрическим шарниром I 1.
)олскг б, бедро 7 и корпус 8 днухстепс.HOio щар1н- ра приводится в движение с помощью состоящих из электродви1ателей с редукторами следящих приводов 12, 13 л 14 установленных на корпусе 8 и связанных электрически с апнаратурой упр-зления 5. При этом (фиг. 2) выходной вал привода 14 с помощью зубчатого колеса 15 связан с зубчатым сектором 16, неподвижно закрепленным на раме 2. Выходной вал привода 13 с гюмощ.ью самотормозящейся червячной пары 17, 18 связан с валом 19, на котором закреплено бедро 7. Вял 19 и корпус 8 связаны между собой с помощью щарнира 11. Выходной вал привода 12 голени 6 с помощью самотормозящейся червячной нары 20, 21 связан с валом 22, установленным на корпусе 8 с по.мощью подщинника 23 параллельно валу 19 и перпендикулярно оси, 3. На вал 22 насажен ншив 24, который с помонхью гибкой передачи 25, например, цепной, передает движение на щкив 26, н-асаженный на ось 27. Г1оследн1яя жестко связана с голенью 6 и может проворачиватьЕЯ относительно бедра 7 в шарнире 10. Для получен:.я аппаратурой управления 5 о звеньев опор (6, 7 и 8) сигналов об их взаимно.м юложении и положении звена 8
относительно рамы транспортного средства служат потенциометрические датчики обратной связи 28, 29 и 30. При этом корпус датчика 28, измеряющего угол между бедром 7 и голенью 6, жестко связан с бедром 7, а вал датчика 28 с помощью зубчатой пары
(колес) 31, 32 связан с валом 27, на котором закреплена голень 6. Аналогично корпус датчика 29 установле; на корпусе 8 к его вал получает вращение- от вала 19 (на котором закреплено бедре 7) с по. зубчатой нары 33, 34. Корпус же датчика 30 установлен на корпусе 8 и его вал связан зубчатыми ко.лесами 35, 36 с осью 3.
При движении щагающего аппарата лар зерный дальномер 4 сканирует перед ни.м местность. Полученная от дальномера информация о поверхности передвижения обрабатывается связанной с ЭВМ аппаратурой унравления 5, где фор.мируются законы изменения щдэнирных углов онор с учетом вы бранной траектории и скс.ости движения аппарата. Выработангые Э1Д8М ; аппаратурой управления 5 сигна.чь осгуг.сют на
следящие приводы .
приводи
во вращение выходные заль лх редукторов. Так как зубчатьсй сектоэ 16 vi ecTKO связан с рамой 2, зубчатое колесо i5 при зоащении выходного вала 14 обкатываетсй по сектору 16, заставляя корпус двухитепенного uj-apнира В совершить вращение этносительнс оси 3. Поскольку бедро 7 с-.язано с корпусом 8 при помощи цилимдр1.-;еского нарнира П, то оно в.месте с гслгнью б также будет вращаться относительно оси 3, обеспечивая тем самы.м горизонтально дл ижение мащины с помощ,ью опор, взаимодействующих с грунтом, или перенос свободных опор. При этом зубчя ое колесо 35, обкатываясь по колесу 36, мриводит во зращ.ение вал датчика 30 обратной связи, сигнал от которого пост}пает в аппаратуру управления 5.
Сигналы на подъем а оп скание бедра 7, поступающие на привод 16,1через червячную пару П, 1В приводят в движение вал 19 с закрепленным на нем бедром 7. Связа.чный с вало.м S9 через зубчатую пару 33. 34 датчик 29 вырабатывает сигнал обратной связи для управления сле.дящим приводо.м 13.
Аналогично, сиг}1алы на сгг бание опоры в щарнире 10, поступающие на следящий привод 12, через червячную пару 20, 21 приводят в движение вал 24. Поскольку пара 17, 18 самотор.мозящаяся, через щкив 24 гибкая связь 25 приводит во вращение щкив 26 и вал 27, с которым связана голень 6. Связанная с валом 2/ шестерня 31 приводит в движение шестерню 32 и вал джтчика 28.
При отсутствии сигналов от аппаратуры управления 5, т. е. при неработаюш,их приводах 12, 13, 14, взаимное расположение звеньев опор не изменяется, а шагающий аппарат не опускается на землю под действием собственного веса из-за наличия самотормозяш,ихся червячных передач 17, 18 и 20, 21.
Следящий привод 14 может быть установлен на раме 1 и 2, и может приводить в движение корпус двухстепенного шарнира 8 непосредственно от колеса 15, входящей в этом случае с ним в зацепление. При этом отпадает надобность в секторе 16. Одиако приведенная в описании схема установки привода 14 более удобна в технологическом и эксплуатационном отношениях.
Применение данного изобретения позволяет простыми техническими средствами на 20 - 30% уменьшить маховый момент шагающей опоры, уменьшить на 20% мощность приводов ее переноса и сгибания относительно рамы транспортного средства, а также увеличить быстродействие и тем самым улучшить проходимость.
Формула изобретения
. Опора шагаюи1его транспортного средства, содержащая бедро с нижлим и зерлним горизонтальными шарнирами, к ниж}:е% у из которых присоединена голень с опорной пятой, а к верхнему - корпус двухстепемного щарнира, вертикальная ось котйрогч) жестко закреплена в раме транспортного средства, и индивидуальные приводы поворота корпуса двухстепенного шарнира, бедра oH голени, отличающаяся тем, что, с увеличения быстродействия путем уменьшения махового момента, привод поворота голени установлен на корпусе двухстепенного щарнира и соединен с голенью кинематической связью.
S
2. Опора по п. I, отличающаяся тем, что указанная кинематическая связь выполнена в виде гибкой, например, цепной передачи, ведущее звено которой установлено соосно с верхним шарниром бедра, а ведомое - соосно с его нижним шарниром и жестко присоединено к голени.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 250251, кл. G 01 D 1/10, 1964.
S
2.Вукобратович М. Шагающие po6oTiii и антропоморфные механизмы. М., «Мир, 1976. с. 437 н 453.
| название | год | авторы | номер документа |
|---|---|---|---|
| Опора шагающего транспортного средства | 1978 |
|
SU745763A1 |
| Шагающая опора транспортного средства | 1980 |
|
SU933533A1 |
| Опора шагающей машины | 1977 |
|
SU751701A1 |
| Нога шагающего аппарата | 2018 |
|
RU2709945C1 |
| Колесно-шагающий движитель транспортного средства | 1982 |
|
SU1110708A1 |
| Колесно-шагающий движитель | 1979 |
|
SU880852A1 |
| Шагающее транспортное средство | 1977 |
|
SU686930A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ВЫСОКОЙ ПРОХОДИМОСТИ | 2013 |
|
RU2554900C2 |
| ШАГАЮЩЕЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2010 |
|
RU2448859C2 |
| Колесно-шагающий движитель транспортного средства | 1981 |
|
SU1000336A1 |
Фиг. /
.2
