3 с измерительно 1 тс.леа 1арагурой, соеДИ1- еННЬ Й с ОЬ;ерХ - ОСТ П:)Л ,ОМ 1
кабель - ым тросом 4.
i,l) 2 способствует ПОЛ) УСТОЙЧ П«ХТИ 0 1С ХНОСТ 10 0 1 lpli Д 511ЖО : U и ia ВО.ЧИСИЛН. С этой же tejl)IO 1,
тяжести 1 плавучести позсрх 1ост 0 о , а также точка репле 1 я к гибкощ кабельному тросу 4 )1 к носовой части,
Подводны контейнер 3 снабжен верт 1кальнымн парусам 5 бла -одаря низкому раеноложен о тяжест обладает большой остойчнвостыо. На торцовой нодводного контей ера 3 установлс гндроакуетнческнй нреобразователлз 6. Гнбкнй кабельный трос 4 пр кренлен к К)плавку 1 носредетвом шар пр 0-амортнз рую 1,его устройства 7.
Дрейфу 0 Д Й океа ограф чсск 1 1 буй енабже аотомат чеекнм регулятором нлавучест, (ia чертеже не ноказап), оттяжн 1м тросом 8, айдроном 9 п нронульспвной установкой.
Гнбкнй кабельный трос 4 выполнен в неравноплечей петл, подводный контейнер 3 выполнен е плавучесть О, весу в воде г,еньше о плеча неравнонлечей петлн, а оттяжной трос 8 пр креплеп концом к верхней част нодводиого коптей iepa 3, а концом прнкренлс через автомат ческ Й регу.лятор п, авучест к большему плечу нерав 1оплечей петлн в точке, расположенной выше верхней частн нодводного контейнера 3.
Датчнк глубнны (на чертеже пе показан) установле а новерхностном 1 оплавке 1 ; связан е нодводнглм контейнером кабельным тросом 4. Автомат чеек Й регулятор плавучест смонтпрован на большем нлече неравнонлечей нетлп, в месте креп. к пос; еднему оттяжл ого трос;; 8. 11ронульс 1вная емопт 1ро1запа па подводном контеЙ 1ере 3, а гайдро 9 связан с носледн м.
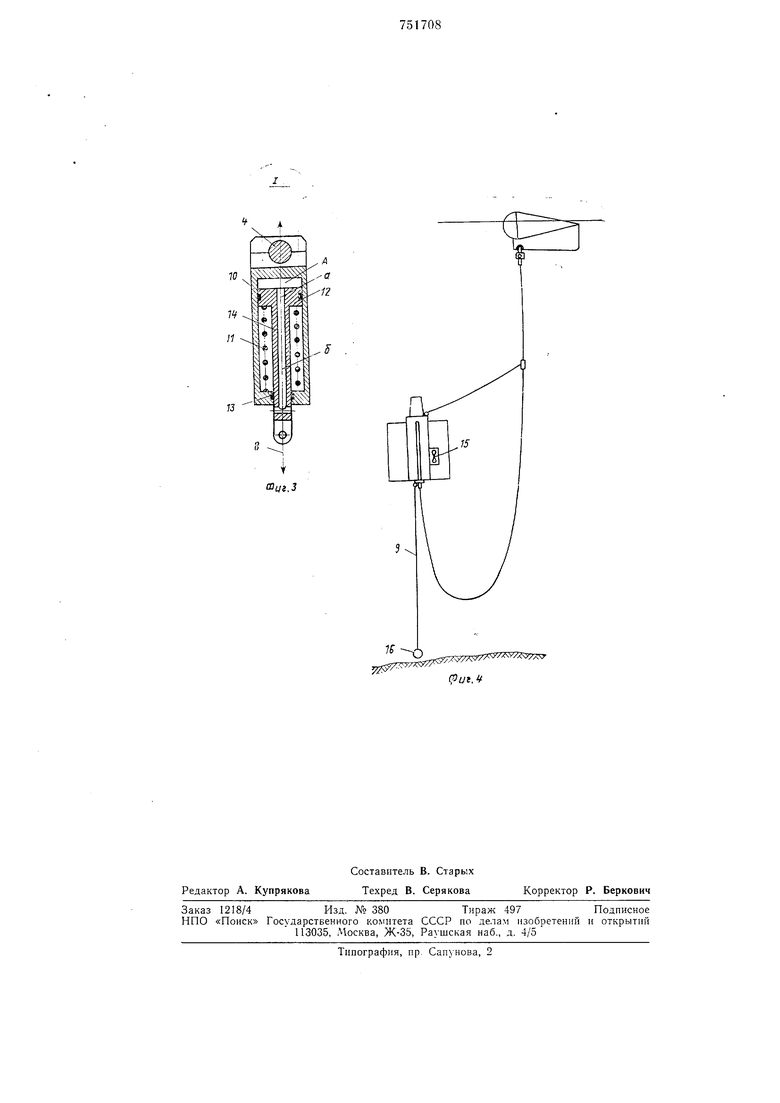
Автомат 1чеекпй регулятор н.лавучеетн содержнт цнлпндр 10 с 11, норшнем 12, унлотннтельпымн кольцам 13 штоком 14. В 12 i 14 выпо;п1ены отверст 1я а н б, сонряжен Ь е между собой. Отверст1 е а в норшне 12 сооб 1еНО с ПОрШПеВОЙ НО.ЛОСТ)0 А Д ЛИНДра
10, шток 14 связан с оттяжным тросом 8, а цп., 10 е 5язан е плечом неравноплечей нетл.
Пронульснвпая содерж т электродвнгатель (на чертеже пе показан) н гребной 15.
Гайдроп 9 содержнт шарообразный груз 16.
Оттяжной трое 8 направлен вверх от подводного контейнера 3, нод углом 20- 45° к горнзонту для облегчення поверхностного нонлавка 1 нрн увлеченнп
нодвод ого контс П ера 3 теченнем в райоH;IX океана, нокрытых льдом.
Ус, суЩССТ1КН:а 1 Я КОНСТРУКЦ буя 1 СГО Юр :V ПЛ ЬНОГО фуНК ШОН рован Я является 1{) нлавучеет не только у 1овер.х 1остного нонлавка 1, но у подводного коптейнера 3, ве. ноложнтельпой плавучестн подводпого 3 до. быть
меньше нлавучест оверх остного нонлавка 1, но достаточной для урав1Ю зен вання меньшего плеча кабе. троса 4. Под плавучестью одразумевается остаточ ая п.лавучесть, т. е. )азпоет) между весовъ1м , п seeoM (в воздухе) но.лностью снаряжен1 ого буя.
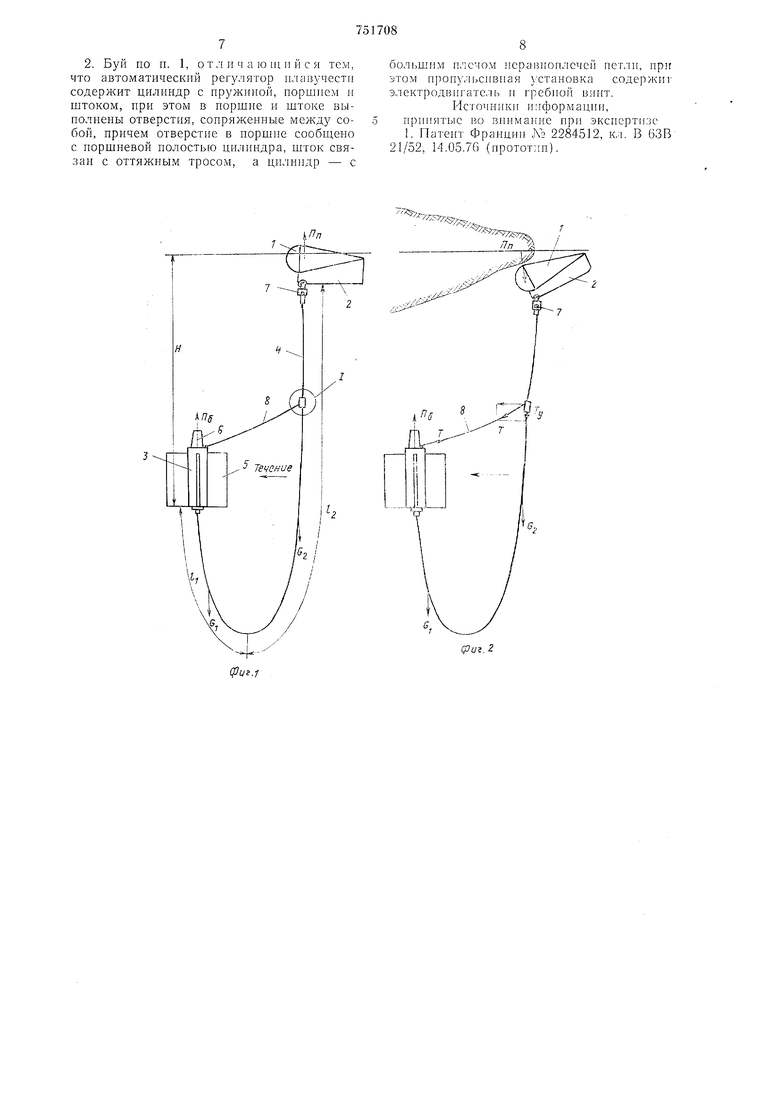
Г. НОГружеННЯ Н Н()ДВОДНО :О КОНтеЙ ера 3, равная ра;-л ост размеров плеч нетлн кабель ого троса 4, онреде.ляетея в зав 1е мостн от длннь н веса кабельного троса 4 ; н.лавучсет По нодводного контейнера 3 (см. фиг. 1). Вышензложенное может быть выраже о математичееки следу юн,нми завиеимоетям :
/:-./,+/,; ,; 0,,/П/,;
//-:/2 - /,; ,; Gj --m/2,
где / - но.пная д. кабе. троса; меньшего (контейнерного)
леча кабел: ого троса; /2 - длина больше о (онлавкового)
плеча кабельного троса; Пб, Пп - нлавучестн буя (контейнера) н тонлавка еоответственно;
GI, (2 - массы мен Л1его и большего
троса соответственно; т - масса длины троса в
воде.
Дрейфуюнгнй океан13графнческ Й буй работает следу 0 цнм образом.
Подводный контеЙ ер 3, обладающий
больилой iapyc ocTb o, увлекаетея теченнем
1 букснрует за собой пон.лавок 1 е помо ныо тросов 4 1 8. Пр встрече буя с краем
ноля (л))) новерхноетпый но лавок 1 унирается в кромку л)Да, а нодвод 5 й контеЙ ер 3, продолжая движение
од действ 1ем течения, атяг1 вает
;абел Л ы: трое 4 н в еще бол)Шей етепени
оттяжной трое 8 (см. фиг. 2).
Вертикаль ая соста ляюн1ая (Ту) силы
атяжения Т оттяжного троса 8 нр тапливает новерх оети Й гон.лавок 1, который
под действ 1ем Т залтггнваетея нод лед.
Ввиду ) дейетвня сил
П ерцнн, горизонтально нанравлеиного тече 1я ) положительной
1 отрицательной нлавучестей поверхноетный нонлавок (н вееь буй) двнжетея по
нлавным дугообразным крнвым, постененпо огибая контур нодоодной части льдины
в направлении течения. Это обстоятельство
можно использовать для расширения функцнональных возможностей дрейфуюндего
буя, для чего .сигнал от датчика глубины погружения через кабельный трое 4 передается в подводный контейнер 3 но акустнчеекой лннии (или по радиоканалу) на базу для сбора и накопления информапнн о толщине подводной части ледового поля.
Возможность передачи данных об намерениях по радио (наряду с гидроакустическим каналом) обеспечивается палнчнем поверхностного поплавка, способного неети радиоантенну, а также электрической связью поверхностного поплавка 1 с подводным контейнером 3 носредством кабельного троса 4. Еслп буй не будет иметь устройств для накопления информации, например но соображениям малогабаритности, то связь его с базой ограничится в подледном положепип гидроакустическим каналом.
Энергия океанского течення, увлекающая буй в подледном положении, должна быть достаточной для преодоления сил трения поверхностного иоилавка 1 о подводную поверхность льда. При спльно изрезанном бугорчатом рельефе поверхности льда силы трения могут достигать больщих величин.
Увеличенная подвижность буя в таких условиях обеспечивается автоматическим регулятором глубины. Прн работе последнего дополнительно уменьщается плавучесть поверхностного поплавка 1 при возрастании сопротивления движению буя.
Поршневая полость А автоматического регулятора плавучести сообщается с морской водой посредством сквозного отверстия а в норшне, а в полости корпуса, где расположена пружина И, паходптся воздух.
Прп возрастании усилия на оттяжном тросе 8 в связи с увеличением сопротивления движению поверхностного поплавка 1 поршень 12 преодолевает упругость пружины И и выдвигается наружу, в воду, уменыная объем воздуха и увеличивая объем воды в цилиндре 10, т. е. уменьщая плавучесть.
Регулятор рассчнтан так, что прн больших значениях силы патяжепия троса плавучесть поверхностного поплавка етановнтся отрицательной и вся буйковая система тонет и под действием течения обходит препятствия. Затем буй всплывает, так как прн евободном нлаванни натяжение оттяжного троса уменьщается, и под действием пружины 11 поршень возвращается в ис ходное положение, восстанавливая первоначальную величипу положительной плавучести.
Демпфирующая способность, обусловленная гидравлическим сопротивлением воды в отверстиях поршня и штока, позволяет увеличить в необходнмых пределах время и дистанцию прохождения буем отрезков пути между смежными точками сопоикос6
иовсиия с иодводной поверхностью ледяного поля. Рациона.1ьпым подбором размеров этих отверстий можно зиачпю.чьно повысить проходимость буя и .юдовых условиях.
При иопадаиии буя в мертвую зону, где течение отсутствует, полиостью, а ирепятствия достаточио велики, погружение буя не иоможет покииуть бую эту зону, так как ие будет силы, увлекающей буй в горизоптальном направлении. В этом случае включается электродвигатель, работаюпщй от батарей и ириводяни1Й во враил,еиие гребпой винт 15. Включение электродвигателя должно пропзводпться только по мере необходимости, дистанциотго, ио команде с базового судна (или с береговой базы), ведуи,его иаблюдепие за движением буя и, следовательно, расиолагаюи1его ииформацпей об остановке буя.
Прп работе буя на малых глубинах океана в районах, покрытых льдом, когда неравиоплечая петля кабельного троса 4 может касаться дна н подвергаться иитенсивиому износу, применяется известное средегво 3 виде гайдроиа 9 (см. фиг. 4), состоящего из щарообразного груза 16 н троса длиной, несколько больше длниы малого плеча иеравноплечей петли кпбельно1о троса 4.
Плавучесть поверхностного неплавка п иодводиого контейнера может колебаться в широких пределах, не влияя заметным образом на основные характериетики буя.
Ф о р м у л а и 3 о б р е т е и и я
1. Дрейфующ1п океанографический буй, включающий поверхностный иоилавок н иодводный контейнер с измерительной и телеаппаратурой, еоедппенный е поверхноетиым поплавком гибкпм кабельиым тросом, отличающийся тем, что, е целью повышения надежности в эксплуатации, он снабжен автоматичееким регулятором плав чести, датчиком глубины, оттяжным тросом,
гайдропом н проиульснвной установкой, причем гибкий кабельный трое выполнен в виде неравнонлечей нетли, иодводиый контейнер вынолнен с плавучестью, равной весу в воде меньшего нлеча неравноплечей нетлн, а оттяжной трое прикреилен одним концом к верхней чаети нодводного ко1ггейнера, а другнм конном ирикреилеи через автоматически регулятор нлавучеcT t к большему илечу неравнонлечей нетЛ в точке, раеиоложеиной выи1е верхней чаети подводного контейнера, прп этом датчик глубины уетановлен на поверхпоетном поплавке и евязан е подводным контейнером гибким кабельным тросом, автоматичеекий регулятор плавучести смонтирован на большем нлече неравноилечей нетли, и месте креплепия к последнему оттяжного троса, пропульсивная установка смонтирова 1а на подводном контейнере, а гайдроп
связан с последним.
2. Буй по п. 1, от л и ч а ю щ и и с я тем, что автоматический регулятор п.лавучеетн содерл ит цилиндр с пружиной, поршнем и штоком, при этом в поршне и штоке выполнены отверетия, сопряженные между собой, причем отверстпе в поршне сообщено с поршневой полостью цилиндра, шток связан с оттяжным тросом, а цилиндр - с
оол1)Олим п.чсчом пераииоплечсп петлп, npir этом нропульспвная установка содержит электродвигатель и гребной винт. Источники ипформацнн, принятые во внимание нри экспертизе 1. Патепт Франции Ki 2284512, кл. В 63В 21/52, 14.05.76 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Дрейфующая станция для океанографических исследований | 1983 |
|
SU1113303A1 |
| ДИНАМИЧЕСКИ УПРАВЛЯЕМЫЕ КРЫЛЬЕВЫЕ СИСТЕМЫ И СПОСОБЫ | 2016 |
|
RU2729696C2 |
| Кабелепрокладочный комплекс | 1990 |
|
SU1794791A1 |
| Устройство радиомониторинга морских и воздушных объектов с применением привязного беспилотного летательного аппарата мультикоптерной схемы с электропитанием по тросу-кабелю | 2023 |
|
RU2813105C1 |
| ГИДРОАКУСТИЧЕСКАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 2000 |
|
RU2199835C2 |
| ГИДРОАКУСТИЧЕСКАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 2004 |
|
RU2258325C1 |
| ПЛАВУЧИЙ ОСТРОВ С.В.ШАРАПОВА | 1996 |
|
RU2107638C1 |
| УСТРОЙСТВО для ДОСТАВКИ подводных ОБЪЕКТОВ | 1973 |
|
SU398448A1 |
| Запань для отвода загрязнений,плавающих в поверхностном слое потока воды | 1986 |
|
SU1423685A1 |
| СИСТЕМА ОБНАРУЖЕНИЯ И РЕГИСТРАЦИИ ГИДРОАКУСТИЧЕСКИХ И ГИДРОДИНАМИЧЕСКИХ ВОЗДЕЙСТВИЙ | 2015 |
|
RU2587523C1 |
Т
/ 7/7 1риг. 2
70
13
