(54) ТРАНШЕЙНЫЙ ЭКСКАВАТОР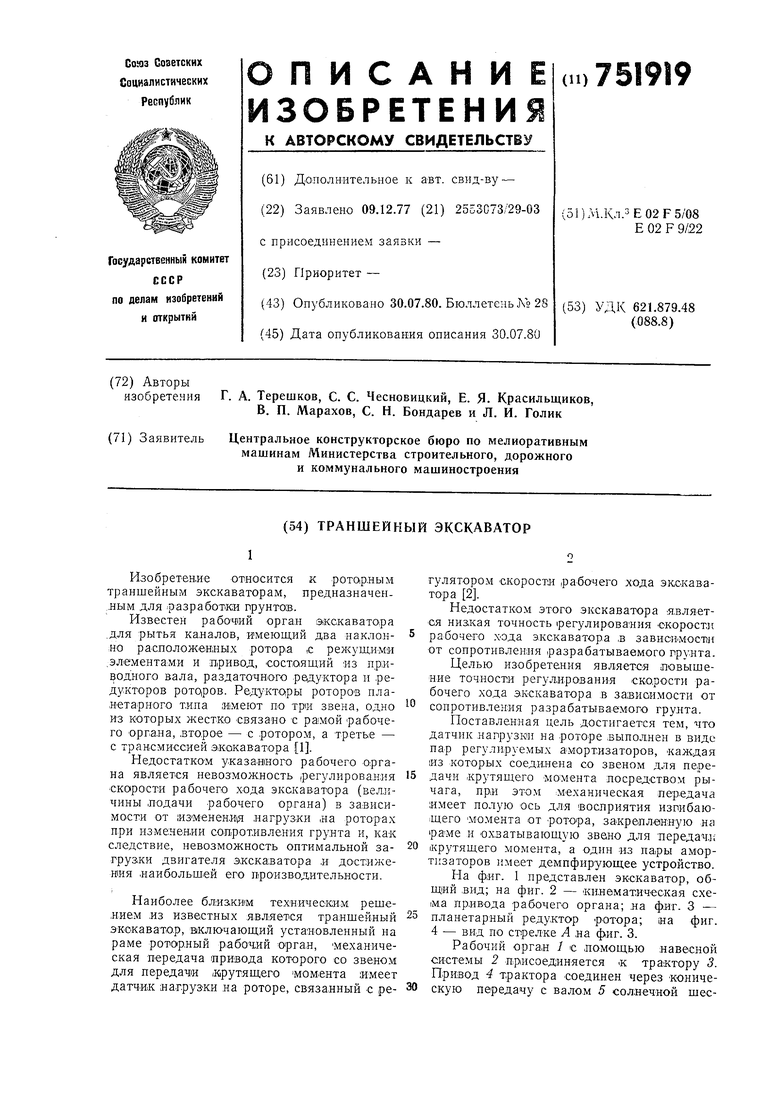
| название | год | авторы | номер документа |
|---|---|---|---|
| Траншейный экскаватор | 1979 |
|
SU891859A1 |
| Рабочий орган землеройной машины | 1977 |
|
SU672297A1 |
| Энергетическая установка транспортного средства | 1990 |
|
SU1736767A1 |
| Рабочий орган траншейного экскаватора | 1988 |
|
SU1571148A1 |
| Дифференциальный раздаточный редуктор трансмиссии траншейного экскаватора | 1978 |
|
SU700607A1 |
| Рабочее оборудование роторного экскаватора с инерционной разгрузкой | 1990 |
|
SU1754849A1 |
| ПЯТИСТУПЕНЧАТЫЙ ЭЛЕКТРОСТАРТЕР | 2016 |
|
RU2624778C1 |
| СТАНОК-КАЧАЛКА | 2012 |
|
RU2506457C1 |
| Роторный траншейный экскаватор | 1954 |
|
SU104698A1 |
| СТАНОК-КАЧАЛКА | 2012 |
|
RU2506455C1 |
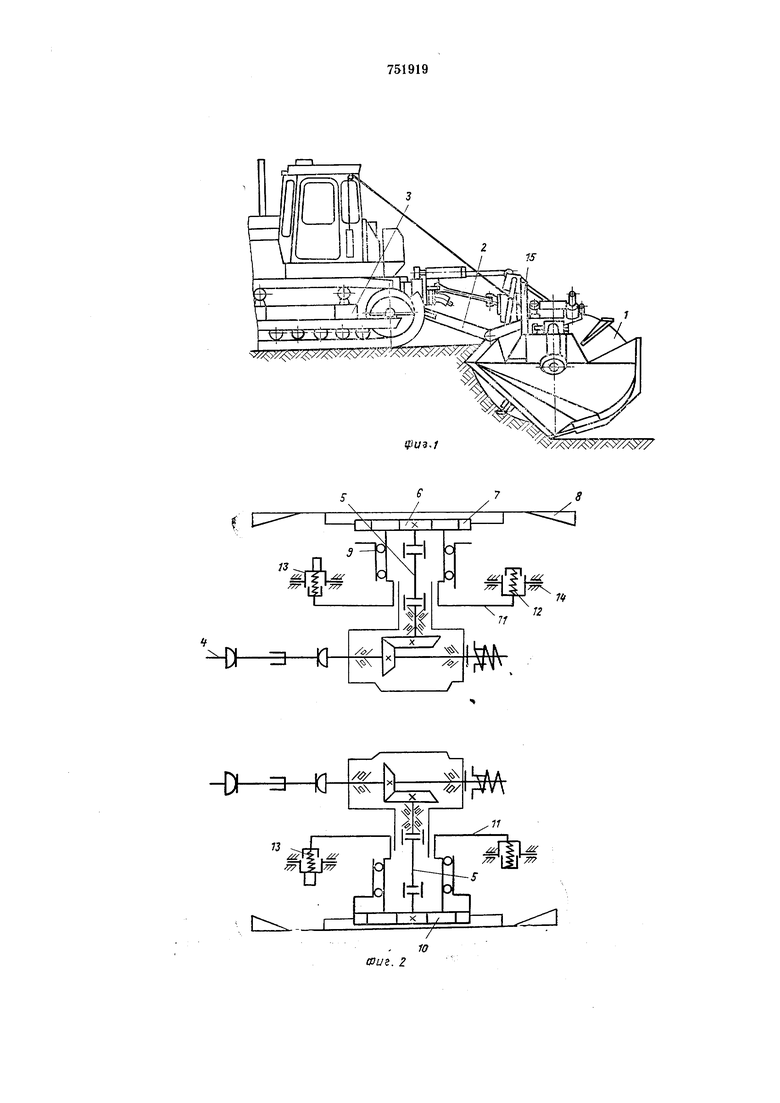
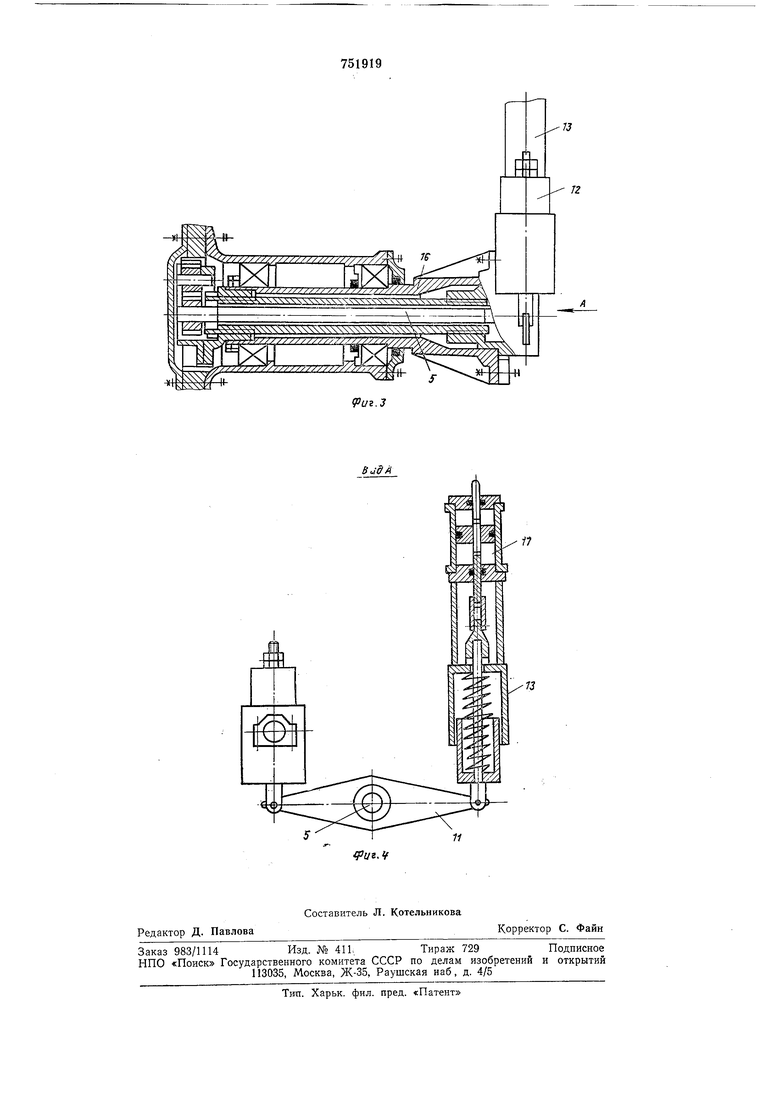
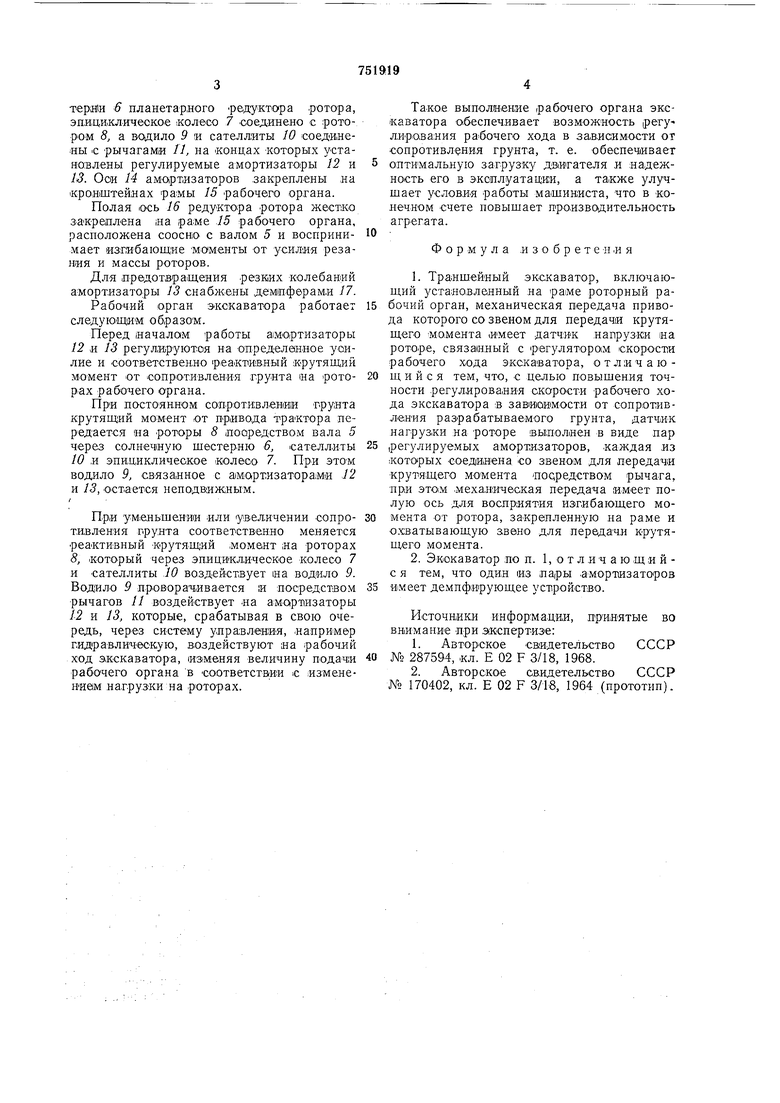
Изобретение относится к роторлым траншейным экскаваторам, предназначен„ным для .разработки прунтов. Известен рабочий орган зкскавато ра .для рытья калалов, имеющий два наклонно расположенных poropia .с режущими .элементами и привод, состоящий из пр;иводного вала, раздаточного редуктора и .редукторов pOTOipOB. Редукторы роторов планетарного Типа имеют по три звена, о.дно из которых жестко связано с рамой рабочего орга.на, .второе - с .ротором, а третье - с трансмиссией акокаватора 1. Недостатком указанного рабочего органа является невозмож.ность регулирования скорости рабочего хода экскаватора (вел.ичины лодачи рабочего органа) в за:висимости от 1изменен.И|Я лагруз.ки ,на роторах при изменении сопротивления грунта и, ка-к следствие, невозможность оптимальной загрузки двигателя экскаватора .и достижения лаибольщей его производительности. Наиболее бл:из,ким техническим рещением .из известных .является траншейный экокавато.р, включающий установленный на раме роторный р|абочий орган, механическая передача привода которого со звеном для передачи крутящего момента 1имеет датчик нагрузки на роторе, связанный с регулятором скорости рабочего хода экскаватора 2. Недостатком этого экскаватора является низ,кая точность регулирования скорости рабочего хода экскаватора в зависимостш от сопротивления разрабатываемого грунта. Целью изобретения является ловышенне точности регул.иравани:Я скорости рабочего хо.да экскаватора в зависимости от сопротивления разрабатываемого грунта. Поставленная цель достигается тем, что датчик .нагрузки на .роторе выпо.лнен в виде пар регулируемых амортизаторов, каледая из которых соединена со звеном для передачи крутящего мо:мента посредством рычага, при этом механическая пер.едача имеет полую ось для восприятия изшбаю|Щего момента от ротора, закрепленную на раме и охватывающую звено для передач.; крутящего момента, а один из пары амортизаторов имеет демпфирующее устройство. На фиг. 1 представлен экскаватор, общий вид; на фиг. 2 - ки.нематическая схема привода рабочего органа; .на ф.иг. 3 - планетарный редуктор ротора; на фиг. 4 - вид по ст:релке А на фиг. 3. Рабочий орган / с помощью навесной системы 2 присоединяется к трактору 3. Привод 4 трактора соединен через коническую передачу с валом 5 солнечной шеетерйи 6 планетарного ВДУктора .ротора, эпициклическое колесо 7 соединено с ротором 8, а водило 9 и сателлиты 10 соединены ic рычагами //, на концах «оторых устанозлены регулируемые амортизаторы 12 и 13. О аи 14 амо1ртизаторов .закреплены л а «ронштейнах рамы 15 рабочего органа.
Полая .ось 16 редуктора ротора жестко заКреплена яа раме 15 рабочего органа, расположена соосню с валом 5 и воспринимает изгибающие моменты от усиляя резания и массы роторов.
Для .предотвращения резких колебаний амортизаторы 13 снабжены демиферами 17.
Рабочий орган экскаватора работает следующим образом.
Перед началам работы а1М.ортизаторы 12 и 13 регулируются на определаниое усилие и соответственно р|еа.кт1И;В.ный крутящий момент от .сопр1отивления грунта ма ротор ах рабочего органа.
При постоянном сопротивлевии грунта крутящий момент от привода тра.ктора передается иа роторы 8 лооредством вала 5 через солнечную шестерню 6, .сателлиты 10 и эпициклическое .колесо 7. При этом водило 9, свЯзанное с .артизаторами 12
и 13, .остается неподвижным.
/
Пр.и уменьшении или увеличении сопротивления грунта соответственно меняется реа.ктивный -крутящий .момент на роторах 8, .который через эпициклическое колесо 7 и сателлиты 10 воздействует на водило 9. Водило 9 пр.оворач.ивается и носредством рычагов // воздей.ствует на амортизаторы 12 и 13, которые, срабатывая в свою очередь, через систему управления, .например гидравлическую, в.оздействуют иа рабочий ход экскаватора, изменяя величину подачи рабочего органа в саответствии с изменением нагрузки на роторах.
Такое выполнение рабочего органа экскаватора обеспечивает возможность регулиро.вания рабочего хода в зависимости от сопротивления грунта, т. е. обеспеч1ивает оптимальную загрузку двигателя и на.дежность его в эксплуатации, а также улучшает условия работы мащиниста, что в конечном счете повышает производительность агрегата.
Формула изобретен.и я
И1СТОЧНИКИ информадии, принятые во внимание при зк.сперти.з.е:
/г
4
-№
- L R4
7
NT
X
Ч) J №
J
73
2r
.-:±
7J
гг
