(54) ТРАНШЕЙНБ1Й ЭКСКАВАТОР

| название | год | авторы | номер документа |
|---|---|---|---|
| Траншейный экскаватор | 1977 |
|
SU751919A1 |
| Траншейный экскаватор | 1979 |
|
SU876891A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ТРАНШЕЙНЫМ ЭКСКАВАТОРОМ | 1973 |
|
SU394509A1 |
| Шпиндельное устройство клети профилегибочного стана | 1984 |
|
SU1192880A1 |
| УЗЕЛ АКСЕЛЕРАТОРА ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ С ТУРБОНАДДУВОМ | 2018 |
|
RU2681805C1 |
| Предохранительная фрикционная гидромуфта | 1973 |
|
SU461256A1 |
| Роторный траншейный экскаватор | 1961 |
|
SU141104A1 |
| ПДТЕНТНО-ТЕХКРЕСНАЯ | 1971 |
|
SU305241A1 |
| Система управления фрикционной муфтой блокировки гидротрансформатора | 1990 |
|
SU1782786A1 |
| Рабочий орган траншейного экскаватора | 1988 |
|
SU1571148A1 |
1
Изобретение относится к землеройной технике, в частности, к роторным траншейным экскаваторам.
Известен траншейный экскаватор, включаюш.ий установленный на раме роторный рабочий орган, механическая передача привода которого со звеном для передачи крутяшего момента имеет датчик нагрузки, связанный с регулятором скорости рабочего хода экскаватора 1.
Недостатком указанного экскаватора является низкая точность регулирование скорости рабочего хода в зависимости от сопротивления разрабатываемого грунта.
Известен также траншейный экскаватор, имеюш.ий установленный на раме роторный рабочий орган, механическая передача привода которого с охватываемым полой осью звеном для передачи крутящего момента, имеет датчик нагрузки на роторе, связанный с регулятором скорости рабочего хода, и устройство, предохраняюшее рабочий орган от перегрузок (устройство выполнено в виде дисковой фрикционной муфты, расположен- ной на валу) 2.
Недостатками траншейного экскаватора являются , прежде всего, большая трудоемкость настройки датчиков нагрузки (амортизаторов) при изменении их пределов регулирования в зависимости от изменения категории прочности грунта, так как для регулирования датчиков необходимо остановить экскаватор и методом проб и попыток (пуская и останавливая экскаватор) найти необходимый диапазон регулирования, а наличие рычагов увеличивает габариты датчика и не позволяет поместить его вне зоны разработки и транспортировки грунта, что, в свою очередь, снижает эксплуатационную
10 надежность датчиков.
Кроме того, такая конструкция датчиков нагрузки не позволяет предохранять привод рабочего органа от нагрузок, возникающих при стопорении рабочего органа при встре j че с препятствием, т.е. от перегрузок, и поэтому для этого введены муфты предельного момента.
Цель изобретения - улучшение условий эксплуатации путем снижения трудоемкости настройки датчиков нагрузки и по30вышение надежности.
Цель достигается тем, что в траншейном экскаваторе, включающем установленный на раме роторный рабочий орган, механическая
передача привода которого с охватываемым полым валом звеном для передачи крутящего момента имеет датчик нагрузки на роторе, связанный с регулятором скорости рабочего хода, и механизм, предохраняющий рабочий орган от перегрузок, датчик нагрузки выполнен в виде кулачковой муфты и снабжен гидроцилиндром, соединенным с пневмогидроаккумулятором, при этом неподвижная полумуфта кулачковой муфты жестко соединена с рамой рабочего органа, а подвижная установлена с возможностью взаимодействия с гидроцилиндром, механизм, предохраняющий рабочий орган от перегрузок, выполнен в виде пружинных гидроаккумуляторов, связанных с регулятором скорости и взаимодействующих с датчиком нагрузки, при этом гидроцилиндр датчика нагрузки имеет рабочую полость, выполненную в виде полого замкнутого профиля кольцевого сечения.
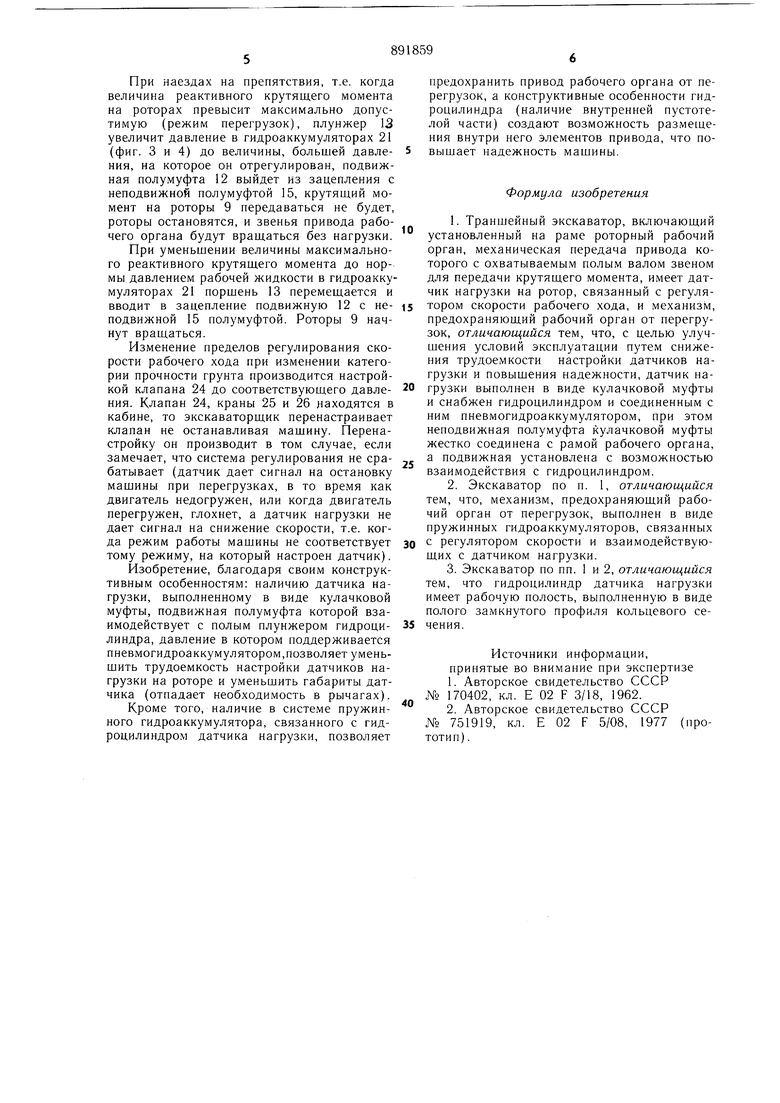
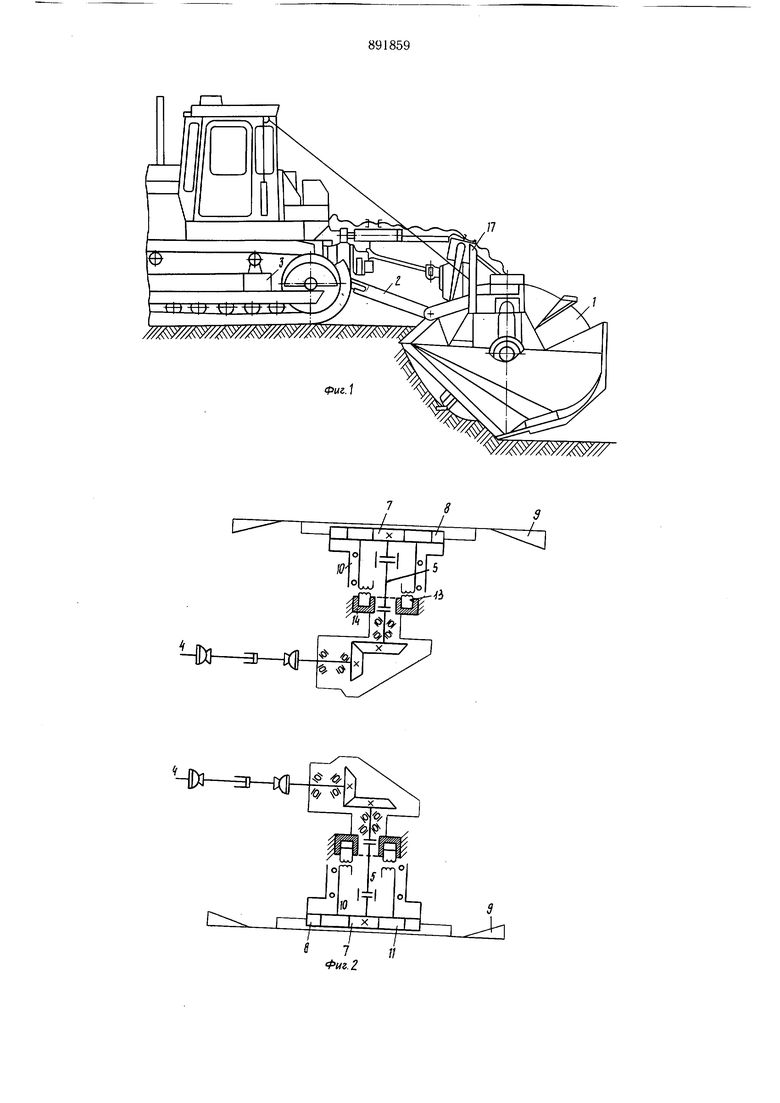
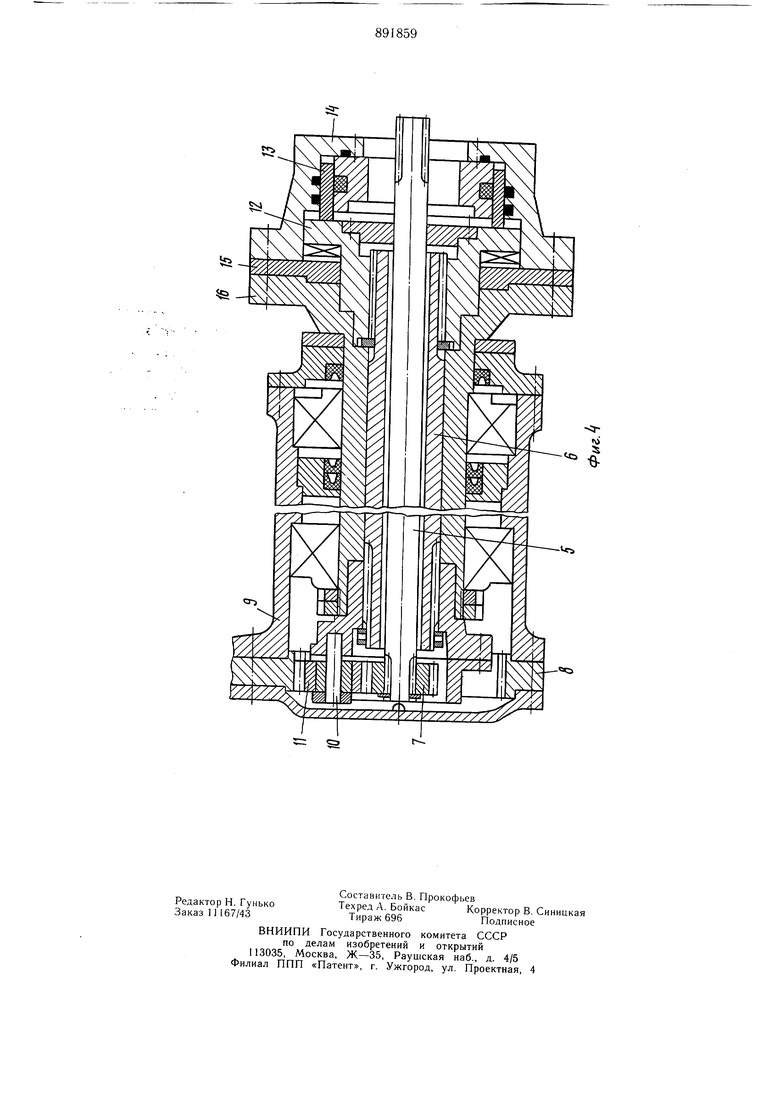
На фиг. 1 изображен экскаватор, общий вид; на фиг. 2 - кинематическая схема привода рабочего органа; на фиг. 3 - гидравлическая схема работы и настройки датчиков нагрузки; на фиг. 4 - планетарный редуктор ротора {с кулачковой муфтой - датчиком нагрузки).
Транщейный экскаватор (фиг. 1) состоит из рабочего органа 1, который с. помощью навесной системы 2 присоединен К трактору 3.
Привод 4 трактора (фиг. 2) соединен через коническую передачу и элементы планетарного редуктора, а именно: вал 5, охватываемый полой осью 6 (фиг. 4), солнечную щестерню 7 (фиг. 2), эпициклическое колесо 8 - с ротором 9, а водило 10 с сателлитами 11 (фиг. 4) соединено с имеющей винтовые кулачки подвижной полумуфтой 12, которая установлена на щлицах полой оси б и, взаимодействуя с полым плунжером 13 гидроцилиндра 14, может входить и выходить из зацепления с неподвижной полумуфтой 15.
Неподвижная полумуфта 15 жестко закреплена на корпусе 16 планетарного редуктора, соединенного в свою очередь с рамой 17 рабочего органа (фиг. 1).
Гидроцилиндр 14 имеет рабочую полость, выполненную в виде полого замкнутого профиля кольцевого сечения, благодаря чему внутренняя пустотелая часть гидроцилиндра используется для размещения элементов привода (фиг. 4).
Плунжер 13 гидроцилиндра 14 гидравлически связан с порщнем 18 гидроцилиндра 19 (фиг. 3), взаимодействующим посредством гидравлической, электрической и т.д. системы управления с регулятором скорости рабочего хода. Гидроцилиндр 19 гидравлически связан с гидропневмоаккумулятором 20.
Для предохранения привода рабочего органа от перегрузок, возникающих при встрече с препятствием, в системе установлены
пружинные гидроаккумуляторы 21. Кроме того, в системе имеется дроссель 22 (для предотвращения резких колебаний давления), насос 23 и установленные в кабине трактора клапан 24 (для настройки усилия срабатывания плунжера 13(и краны 25 и 26.
Экскаватор работает следующим образзом.
Перед началом работы гидроаккумулятор 21 (фиг. 3) регулируется на давление, соответствующее максимально допустимому крутящему моменту на роторах рабочего органа (независимо от категории грунта).
Клапан 24 настраивается на давление срабатывания, соответствующее максимальной скорости рабочего хода при разработке грунта определенной категории прочности.
Насосом 23 в гидропневмоаккумуляторах 20 через открытые краны 25 и 26 создаете;давление рабочей жидкости равное давлению срабатывания клапана 24.
При соответствии сопротивления резанию грунта давлению в аккумуляторах, крутящий момент от привода трактора на роторы 9 (фиг. 2) передается валом 5 через щестерню 7, сателлиты 11 и эпициклическое колесо 8. Подвижная 12 (фиг. 4) и неподвижная 15 полумуфты находятся в зацеплении, и водило 10, связанное с подвижной полумуфтой, не вращается (максимальная скорость экскаватора при постоянном сопротивлении грунта резанию).
При плавном увеличении сопротивления грунта соответственно возрастает реактивный крутящий момент на роторах 9 (фиг. 2), который через эпициклическое колесо 8 и сателлиты 11 воздействует на водило 10, преодолевая усилие на плунжере 13 (фиг. 3) от давления в аккумуляторах 20. Водило 10 проворачивается (фиг. 4) и подвижная полумуфта, перемещаясь по щлицам полой оси 6 (за счет осевой составляющей, возникающей благодаря винтовой форме кулачков), воздействует на плунжер 13, который перемещает порщень 18 (фиг. 3), воздействующий Б свою очередь через систему управления, например, на регулятор скорости рабочего хода экскаватора, изменяя величину подачи рабочего органа в соответствии с изменением нагрузки на роторах. Скорость рабочего хода уменьщается соответственно изменению реактивного крутящего момента. При увеличении реактивного крутящего момента на роторах до величины, соответствующей максимальной загрузке двигателя, экскаватор останавливается.
Далее, так как порщень 18 (фиг. 3), перемещаясь, увеличил давление в аккумуляторах 20, то при уменьщении реактивного крутящего момента на роторах 9 давлением рабочей жидкости в аккумуляторах 20 порщень 18, перемещаясь в обратном направлении, воздействует через систему управления на регулятор скорости рабочего хода, при этом скорость экскаватора возрастает.,
При наездах на препятствня, т.е. когда величина реактивного крутящего момента на роторах превысит максимально допустимую (режим перегрузок), плунжер 13 увеличит давление в гидроаккумуляторах 21 (фиг. 3 и 4) до величины, большей давления, на которое он отрегулирован, подвижная полумуфта 12 выйдет из зацепления с неподвижной полумуфтой 15, крутящий момент на роторы 9 передаваться не будет, роторы остановятся, и звенья привода рабочего органа будут вращаться без нагрузки.
При уменьшении величины максимального реактивного крутящего момента до нормы давлением рабочей жидкости в гидроаккумуляторах 21 поршень 13 перемещается и вводит в зацепление подвижную 12 с неподвижной 15 полумуфтой. Роторы 9 начнут вращаться.
Изменение пределов регулирования скорости рабочего хода при изменении категории прочности грунта производится настройкой клапана 24 до соответствующего давления. Клапан 24, краны 25 и 26 находятся в кабине, то экскаваторщик перенастраивает клапан не останавливая машину. Перенастройку он производит в том случае, если замечает, что система регулирования не срабатывает (датчик дает сигнал на остановку мащины при перегрузках, в то время как двигатель недогружен, или когда двигатель перегружен, глохнет, а датчик нагрузки не дает сигнал на снижение скорости, т.е. когда режим работы машины не соответствует тому режиму, на который настроен датчик).
Изобретение, благодаря своим конструктивным особенностям: наличию датчика нагрузки, выполненному в виде кулачковой муфты, подвижная полумуфта которой взаимодействует с полым плунжером гидроцилиндра, давление в котором поддерживается пневмогидроаккумулятором,позволяет уменьщить трудоемкость настройки датчиков нагрузки на роторе и уменьшить габариты датчика (отпадает необходимость в рычагах).
Кроме того, наличие в системе пружинного гидроаккумулятора, связанного с гидроцилиндром датчика нагрузки, позволяет
предохранить привод рабочего органа от перегрузок, а конструктивные особенности гидроцилиндра (наличие внутренней пустотелой части) создают возможность размещения внутри него элементов привода, что повышает надежность машины.
Формула изобретения
Источники информации, принятые во внимание при экспертизе
№ 751919, кл. Е 02 F 5/08, 1977 (прототип) . H itH Н - I I I Iт .„л / ///M//M/M //w// //m/ fmmmmi
/3
11
W
/3
22)
2/
/
2/
20
P
Y
14
J
Ш
/5
L
20
V
ФигЗ
fO
:s
««Э
