Изобретение относится к системам автоматического регулирования и может быть использовано в системах электропривода в химической, нефтехимической и других отраслях промышленности
Цель изобретения - повышение точности системы за счет улучшения качества регулирования на всех участках переходного процесса путем переключения обратной связи по скорости выходной величины Е зависимости от состояния системы регулирования для уменьшения динамического отклонения выходной величины, ускорения переходного процесса и исключения перерегулирования во всех режимах работы системы.
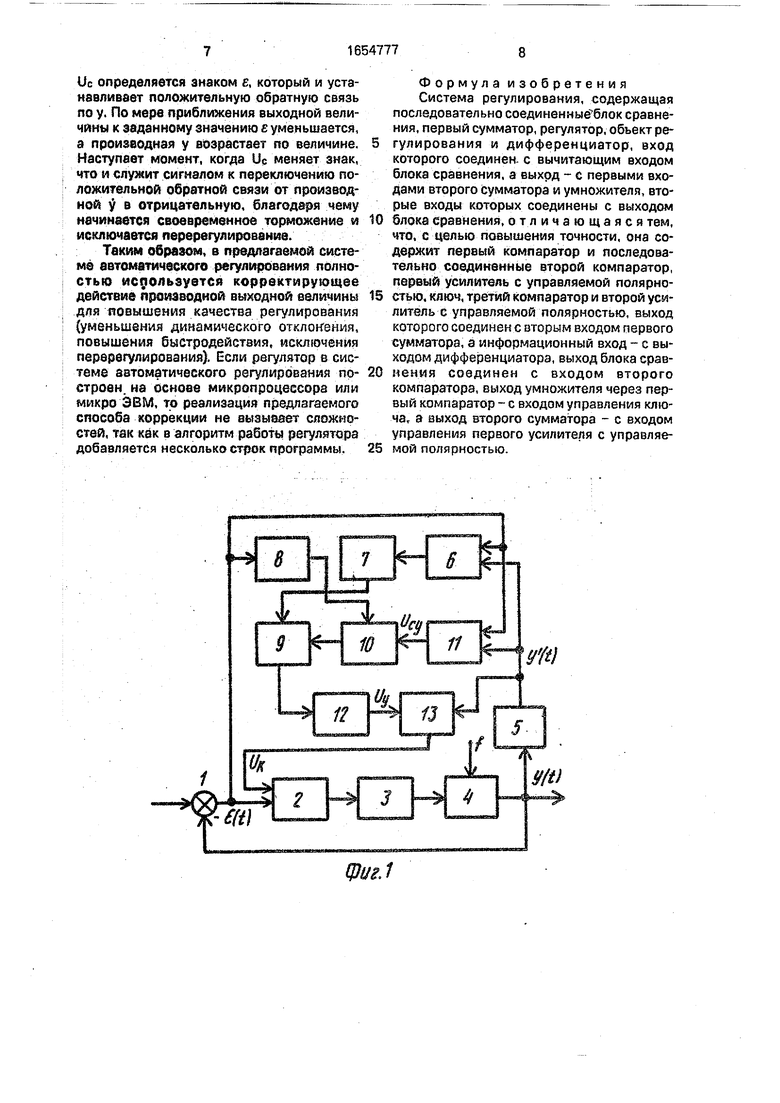
На фиг 1 показана функциональная схе ма системы регулирования на фиг 2 схема усилителя с управляемой полярностью
Система регулирования (фиг 1) содержит блок 1 сравнения, первый сумматор 2 регулятор 3, объект 4 регулирования дифференциатор 5 умножитель 6 первый 7 и второй 8 компараторы ключ 9 первый усилитель 10 с управляемои полярностью второй гдмматор 11 третий компаратор 12 и второй усилитель 13 с управляемой полярностью На схеме обозначены сигнал L ошибки рассогласования корректирую щее воздействие 1Л возмущение i выходная величина у, ее производная у ВНлОДНОИ сигнал второю сумматора 1 i U Первый
CN сл
Јь XI х| х|
вход блока 1 сравнения соединен с входом системы, второй вход - с выходом системы, а выход - с входом второго компараторра 8 и с первыми входами первого сумматора 2, умножителя 6 и второго сумматора 11, выход сумматора 2 через регулятор 3 соединен с входом объекта 4 регулирования, его выход через дифференциатор 5 соединен с информационным входом второго усилителя 13с управляемой полярностью и с вторыми входами второго сумматора 11 и умножителя 6, выход последнего через первый компаратор 7 соединен с управляющим входом ключа 9, информационный вход которого соединен с выходом первого усилителя 10 с управляемой полярностью, его управляющий вход соединен с выходом второго компаратора 8, а информаионный вход - с выходом второго сумматора 11, выход ключа 9 через третий компаратор 12 соединен с управляющим входом второго усилителя 13 с управляемой полярностью, выход которого соединен с вторым входом первого сумматора 2.
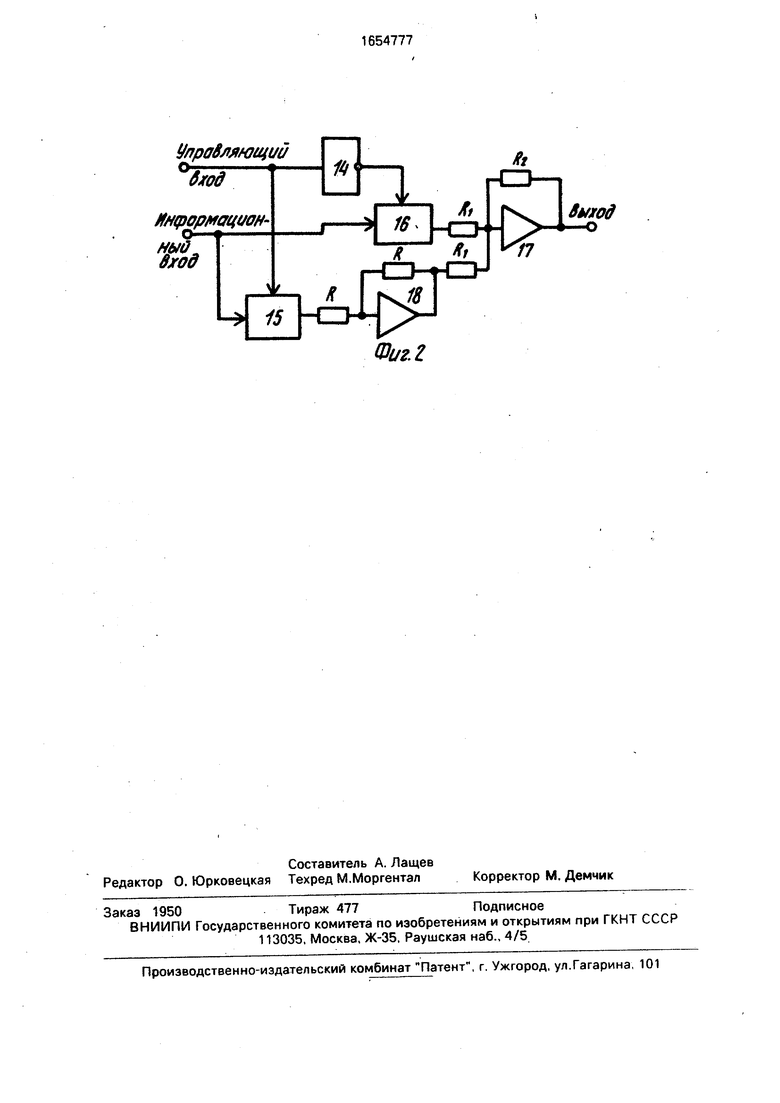
Усилитель с управляемой полярностью (фиг. 2) содержит инвертор 14, первый 15 и второй 16 ключи и инвертирующие усилители 17 и 18. Информационные входы ключей 15 и 16 соединены с информационным входом усилителя с управляемой полярностью его управляющий вход непосредственно соединен с управляющим входом ключа 15 и через инвертор 14 с управляющим входом ключа 16, выход последнего - с первым входом инвертирующего усилителя 17, с вторым входом которого через инвертирующий усилитель 18 соединен выход ключа 15.
Состояние системы определяется произведением ошибки рассогласования ь на производную выходную величину Y. При на- бросе возмущения f выходная величина резко отклоняется от заданного значения - на этом участке произведение е-у 0. При этом для уменьшения динамического отклонения выходной величины корректирующий сигнал от производной у подается как отрицательная обратная связь. В начале отого участка, когда отклонение выходной величины еще не велико, производная у уже имеет большое значение, что свидетельствует о последующем отклонении выходной величины. Поэтому формирование корректирующего сигнала с полярностью, обратной производной у, способствует выработке регулятором упреждающего управляющего воздействия. В результате динамическое падение выходной величины уменьшается.
На следующем участке выходная величина восстанавливается, возвращаясь к
заданному значению Ошибка рассогласования г не меняет своей полярности, производная же у меняет. Поэтому теперь произведение f у 0. Для ускорения возвращения выходной величины к заданному значению корректирующий сигнал от производной у теперь меняет знак и подается как положительная обратная связь. Выходная величина быстрее восстанавливается,
однако это угрожает перерегулированием. Поэтому на этом участке состояние системы контролируется вторым сумматором, выходной сигнал которого определяется выражением Uc в-Ку где К - постоянный
коэффициент. В начале данного участкч производная у мала по величине и знак Uc определяется полярностью рпссоглзсов - ния I, По мере восстанови ния выходной величины рассогласование i уменьшается,
производная у возрастает по величине и наступает момент, когда UL меняет свой знак Изменение знака U,, вызывает изменение полярности корректирующего сигнала т.е. обратную связь oi производной у преобразуют в отрицательную. Это приводит к тому, что корректирующее воздействие из ускоряющего превращается в тормозящее. Следует подчеркнуть что момент изменения знака происходит перед достижением
выходной величиной заданного значения Поэтому торможение в этот момент явпяет- ся своевременным и гораздо эффективнее приводит систему автоматического регулирования в новое установившееся состояние
Такой характер формирования корректирующего воздействия в предлагаемой системе автоматического регулиоования позволяет попностью использои ть упреждающие свойства производной выходной
величины для улучшения ее динамических показателей (уменьшения динамического отклонения, повышения быстродействия, исключения перерегулирования).
При отработке наброса задающего сигнала в начале процесса разгона произведение е у 0. Для ускорения разгона корректирующее воздействие от производной у подается как положительная обратная связь, Это способствует резкому нарастанию выходной величины, однако угрожает перерегулированием. Данное состояние системы напоминает участок восстановления выходной величины при набросе возмущения, поэтому состояние системы контролируется вторым сумматором. Его выходной сигнал вновь определяется выражением К у. В начале разгона величина рассогласования велик,, я значение производной у още малс, поэтому знак Ur
определяется полярностью рассогласования. По мере нарастания выходной величи ны ошибки рассогласования уменьшается производная у возрастает и перед достижением выходной величиной нового заданно- го значения выходной сигнал второго сумматора Uc меняет свой знак. Изменение знака Uc вызывает изменение полярности корректирующего воздействия, т.е. обратную связь от производной у из положитель- ной преобразуют в отрицательную. Это приводит к тому, что корректирующее воздействие из ускоряющего превращается в тормозящее. Такое своевременное торможение эффективно приводит систему авто- матического регулирования к новому заданному значению Следует отмстить, что чем больше скорость изменения выходной величины, т.е. значение у. тем ранкше ,о момента достижения выходной величиной заданного значения, происходит переключение ускоряющего корректирующрго воз действия на тормозящее что необходимо для быстрейшего перевода системы из од ного состояния в другое без перерегупиро вания
Система работает следующим образом Последовательно пннп 1 f 1 сравнения, перпый сумматор 2 , .,г и объект 4 регулирования лх ччончые г ч о ной обратной связью с вихода ча п о5 разуют типовую систему авюмагич с, регулирования по отклонению фиг ) ll,uib дифференциатор 5 - второй уи/ли, ;ч i г управляемой полярностью служит ДЛР флр мироьания корректирующего во..1 ВИР Uk. пропорционального производном / чы ходной величины Остальные элементы си темы контролирую ее состояние и определяют знак U Произволе ,ие / с выхода умножителя 6 послупэет на вход первого компаратора 7, выходной си.нал которого равен логической единице при Ј у 0 и логическому нулю при f у«, С Амз логично работают второй В и 12 ком- параторы. Сигнал с выхода первого компаратора 7 поступает на управляющий вход ключа 9 При сигнале логического нуля ключ 9 находится в состоянии а при си, нчле ли. ической единицы он с ri p i- аается и пропускает выходной сигнал первого /сили ля 1Q с управляемой полярностью но вход третьего компаратора 1 Выходной сигнал в;орого сумм ора 11 определяется выражением Uc f К у постоянный коэффициент Выходной г1,, нал втоиою компаратора d поступает на г- равляющий вход первого усилителя 10 с у. полярностью и определяет по
лярность его выходного сигнала, а выходной сигнал третьего компаратора 12 поступает на управляющий вход второго усилителя 13 с управляемой полярностью и определяет в конечном счете знак корректирующего воздействия Uk
Если на управляющем входе усилителя с управляемой полярностью (фиг. 2) сигнал равен логическому нулю, то на выходе инвертора 14 сигнал равен логической единице Поэтому ключ 15 закрыт, а ключ 16 открыт, и сигнал с информационного входа через него поступает на первый вход инвертирующего усилителя 17 При этом полярность сигнала на выходе усилителя управляемой полярности противоположна полярности сигнала на его информационном входе Если на управляющем входе сигнал равен логической единице то ключ 16 закрывается а ключ 15 открывается, и сиг- чал с информационного входа через него поступает на вход инвертирующего усилителя 18 меняет свою полярность и затем поступает на второй вход инвертирующего усилителя 17 где еще раз меняет знак В резучьтате полярности сигналов на информационном екоде и на выходе совпадают Ко 1,М)ип1 ечт передачи усилителя с управ- ч( ioii но .ярностью устанавливается оот- i f мигм (.м T.ICTOOOB Ri и R
КГ гро ч СССЧННИЯ CHOiPMbl ЭГ ПГ-ЗТИ -ого гегулироиания производит, по пр -и 14- дению v и спгна/ , Ur- l у ьсли гц: изведенир у 0 то -не пвиси/ иссти rir U чрстп отклонение РЫ- xo/hiOH иеличичь заданного значение1 в pi уЛ1.тате надрос j возму| онич f При эгом v уменьшении динамичь ко о отклонения tii1 LMHOH величие ч корректирующее воз- Д11 осуществляется к ак отрииатель- няя обратна 1 связь от производной у Koifla еПроизведениеi у 0 то выходная аели- чич i нзчинаэг возвращаться к заданному in- чению - это сое .ояние имеет место и при г брисе задающего cm нала На элом участ- к: j Я ускорения вс вращения выходной ыс/.ч11ны к заданному значению корректирующее воздействие осуществляется как I. i.io +-,и;ельнач обратная сьязь О произрод- м .1 у io зто угрожает перерегулировани- wii, по„ юму перед возвращением выходной вь/.и1-. ,ны к заданному значению производите/1 юрможение системы путем переключения положительной обрагнил связи от лг оьодной у в отрицательную Это пере- кпюч i. ie осуществляется по сигнала i Ь начале этого участка ошибка paccor ла- ьоьлния . имеет большое значение а про- .| ьодная у - малое Поэтому знаь сигнала
Uc определяется знаком Ј, который и устанавливает положительную обратную связь по у. По мере приближения выходной величины к заданному значению Е уменьшается, а производная у возрастает по величине. Наступает момент, когда Uc меняет знак, что и служит сигналом к переключению положительной обратной связи от производной у в отрицательную, благодаря чему начинается своевременное торможение и исключается перерегулирование.
Таким образом, в предлагаемой системе автоматического регулирования полностью используется корректирующее действие производной выходной величины для повышения качества регулирования (уменьшения динамического отклонения, повышения быстродействия, исключения перерегулирования). Если регулятор в системе автоматического регулирования построен, на основе микропроцессора или микро ЭВМ, то реализация предлагаемого способа коррекции не вызывает сложностей, так как в алгоритм работы регулятора добавляется несколько строк программы.
Формула изобретения Система регулирования, содержащая последовательно соединенныеЧэлок сравнения, первый сумматор, регулятор, объект ре5 гулирования и дифференциатор, вход которого соединен с вычитающим входом блока сравнения, а выход - с первыми входами второго сумматора и умножителя, вторые входы которых соединены с выходом
блока сравнения, отличающаяся тем, что, с целью повышения точности, она содержит первый компаратор и последовательно соединенные второй компаратор, первый усилитель с управляемой полярно5 стью. ключ, третий компаратор и второй усилитель с управляемой полярностью, выход которого соединен с вторым входом первого сумматора, а информационный вход - с выходом дифференциатора, выход блока сравнения соединен с входом второго компаратора, выход умножителя через первый компаратор - с входом управления ключа, а выход второго сумматора - с входом управления первого усилителя с управляемой полярностью.
0
5


| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1425594A2 |
| Импульсный регулятор | 1983 |
|
SU1117585A1 |
| Система управления | 1976 |
|
SU714350A1 |
| Устройство автоматического регулирования толщины полосового проката | 1982 |
|
SU1068193A1 |
| Система автоматического регулирования | 1978 |
|
SU752221A1 |
| Двухконтурная однорегуляторная многоканальная система регулирования | 1989 |
|
SU1658124A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| Следящая система | 1984 |
|
SU1216773A1 |
| Следящая система | 1977 |
|
SU661501A1 |
Изобретение относится к системам ав томатического регулирования и может быть использовано в системах электропривод в химической, нефтехимической и других отраслях промышленности Цель изобретения - повышение точности системы за счет улучшения качества регулирования на зсех участках переходного процесса путем переключения обратной связи по скорости выходной величины в зависимости от состояния системы регулирования для уменьше ния динамического отклонения выходной величины, ускорения переходного процесс и исключения перерегулирования во всех режимах работы системы Цель достигается тем что в систему автоматического регули рования введены первый компаратор и последовательно соединенные второй компаратор первый усилитель с управляемой полярностью ключ третий компаратор и второй усилитель с управляемой полярностью выход которого соединен вторым входом первого суммттор а инФирмяцион НУЙ вход - с выходом диффег°ици эра выход блока сравнения соединенi дом второго компаратора вы од умножи i сля ч рез первый компаоатор сочинен с вх дом управления ключа а ЕЙ ход второго сумм-ъ орг. соединен с информационным вводом перього ус лигеля с управляемои полярностью L ил In С
Фиг.1
Управляющий
бход
НнрормационV&Idjrod
8vwd
Фиг. 2
| Следящая система | 1986 |
|
SU1413596A1 |
