(54) ОИСТЕМА УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления | 2022 |
|
RU2803408C1 |
| СИСТЕМА УПРАВЛЕНИЯ | 2005 |
|
RU2300794C2 |
| Способ регулирования частоты вращения двигателя внутреннего сгорания и устройство для его осуществления | 1983 |
|
SU1149045A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1425594A2 |
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| Устройство для автоматического управления | 1973 |
|
SU465620A1 |
| Система регулирования | 1988 |
|
SU1654777A1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2002 |
|
RU2225633C1 |
| Система автоматического регулирования | 1978 |
|
SU752221A1 |
| Устройство для автоматического управления | 1975 |
|
SU589588A1 |
Каобретение относится к области автоматики и может найти широкое применение при построении высокоточных следящих систем. Известны системы управления, в которых имеются корректирующие устройства, предназначенные для коррекции переходного процесса при скачкообразном изменении ошибки l3. Известные системы характеризуются сложностью при реализации и не обеспечивают полного устранения перерегулирования. Наиболее близкой по технической сущности к предложенному изобретению является система, содержащая измеритель рассогласования, выход которого чере; последовательно соединенные первый сумматор, усилитель и исполнительный механизм связан со входом объекта регулирования, датчик скорости объекта регулирования, выход которого через ключ подсое динен ко входу первого сумматора, анализатор знаков сигналов, выход которого подключен к управлякндему входу ключа 2. Недостатком известной системы является то, что в ней прикципиалыю отсутствует возможность устранения перерегулирования, а время переходного процесса системы остается значительным ввиду того, что тормозящий сигнал с датчика скорости вводится без упреждения после того как сигнал рассогласования уже пом.енял свой знак (т.е. с опозданием). При больших скачкообразных изменениях сиг нала рассогласования известная система отрабатывает их с постоянной скоростью при насыщении усилительных каскадов (кроме участков разгона и торможения). Цель изобретения - устранение перерегулирования и уменьшение времени переходного процесса при скачкообразном изменении ошибки. Поставленная цель достигается тем, что в систему введен дифференциатор, второй сумматор, первый и второй нульорганы, при этом выход измерителя ряс3714350
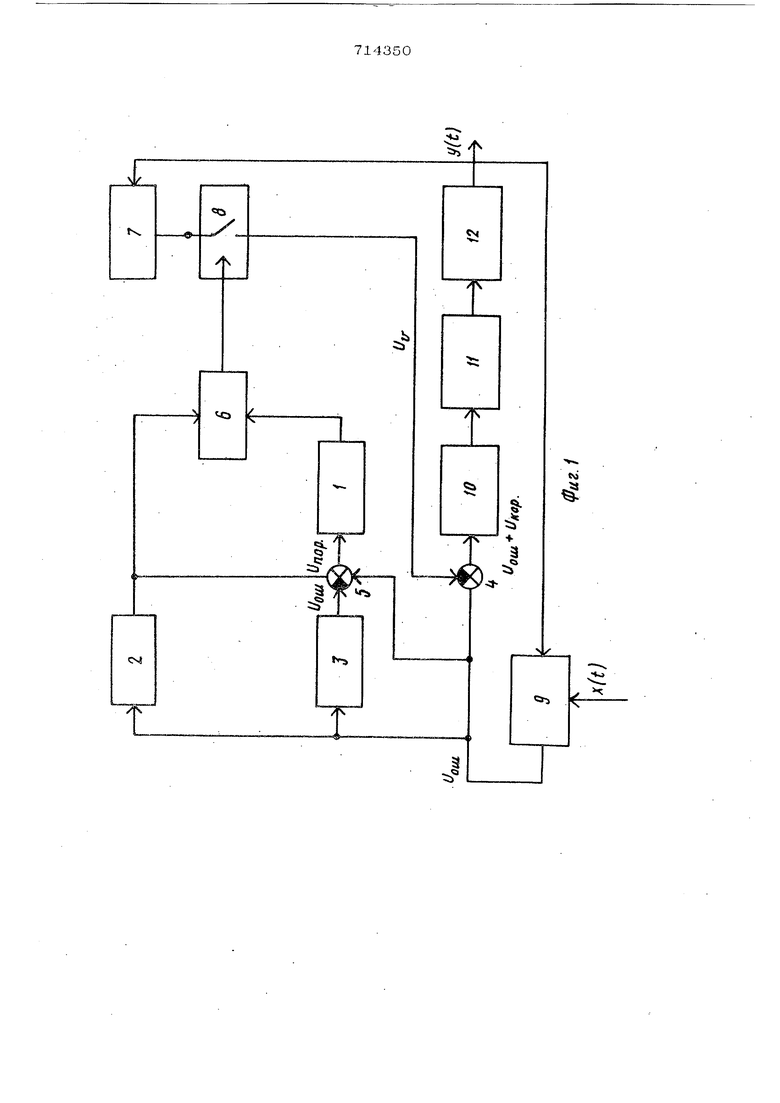
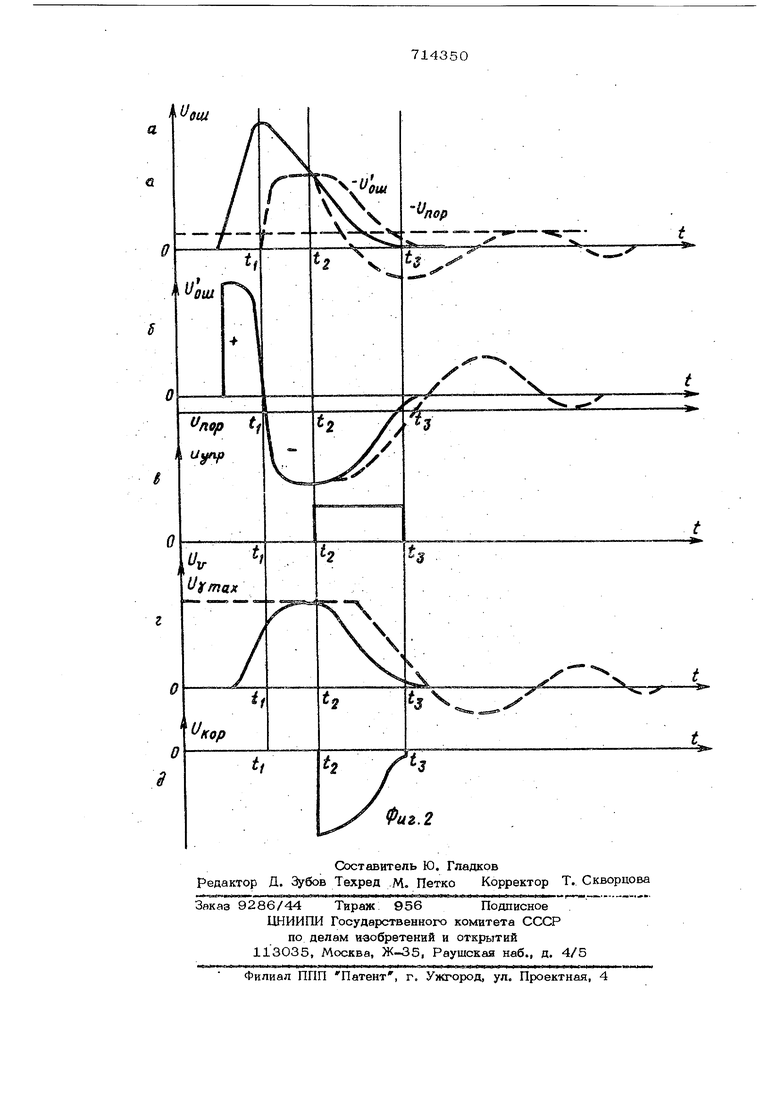
согдпсования соединен со входами дифференциатора и второго нуль-органа, выходы первого и второго нуль-органов подключены ко входам анализатора знаков, входы второго сумматора соединены с вы-5 ходами измерителя рассогласования, дифференииатора и второго нуль-органа, а выход - со входом первого нуль-органа. Функциональная схема предложенной системы представлена на фиг. 1, временные днаграммъ, иллюстрирующие работу системы, представлены на фиг. 2. Система содержит первый и второй нуль-органы 1, 2, дифференциатор 3, первый и второй сумматоры 4, 5, анализатор знаков 6, датчик скорости 7, ключ 8, измеритель рассогласования 9, усилитель 10, исполнительный механизм 11, объект регулирования 12. На фиг. 2 обозначены: Ucxu- сигнал ошибки; Uom - сигнал проазводной от ошибки; Unop эталонный пороговый сигнал; и V - сигнал скорости; - корректирующий сигнал; t - момент изменения знака сигнала производно от ошибки;-to момент равенства сигна ла щюизводной. от ошибки сигналу ошибки а пороговому сигналу. Система работает следующим образом. При отработке медленно меняющихся у1фгвляющих сигналов в установившемся режиме следящая система работает как да|нейная система с малой скоростной ошибкой. Велачана снгаала производной от ошибK«Uout е- сигнал на выходе дифференмнатора 3 близок к нулю и не превышает установлв1ного порогового значения Unop которое задается суммированием в необходимом масштабе сигнала с выхода нульоргана 2, О1феделяклцего знак сигнала ошебки, и сигнала ошибки. Поэтому знак сяшалов иа выходе сумматора 5 и нульоргана 1 соответствует знаку сигнала на выходе нуль-органа 2, При этом управляю щий сигнал на выходе анализатора знаков 6 отсутствует, ключ 8 закрыт и сигнал скоростной обратной связи не подается на вход сумматора 4. Выходной сигнал сумматора 8 соответствует входному сигналу ошибки. При появлении на входе системы задающего сигнала, вызывакядего скачкообразное, ступенчатое изменение ошибки, система отрабатывает его с максимальной ско- }хх:ггью, установившейся после участка раз гона двигателя (см. фиг. 2, а, г моменты времени от О до -fcj ).
Сигнал на выходе дифференциатора 3 (Llow) при имеет форму, показанную на фиг. 2, б.
Так как в моменты времени от О до b-i знак указанного сигнала и соответст- венно знак сигнала на выходе нуль-органа 1 п юдолжает соответствовать знаку сигнала 5 на выходе нуль-органа 2, то ключ 8 остается закрытым и система при отработке сигнала ошибки разгоняется по предельной кривой. Несмотря на то, что в момент времени t сигнал на выходе дифференциатора 3 меняет знак, знак сигнала на выходе сумматора 5 не меня- ется, так как сигнал ошибки Uow превышает по абсолютной величине сигнал (Jout На фиг. 2, а сигналы Uoj« Unop ° казаны с обратным знаком. Система отрабатывает сигнал ошибки по предельной кривой (с максимальной.скоростью); В момент времени tj. сигнал ошибки сравнивается по величине с сигналом на выходе дифференциатора 3, знак сигнала на выходе сумматора 5, а следовательно, и на выходе нуль-органа 1 меняется.Ввиду несоответствия знаков на входах анаякзатора знаков 6 на его выходе начинает формироваться импульс управляютг1его Сигнала ( L/vnp на фиг. 2, в), открываюЩЕЙ ключ 8. О1гнал обра-тной связи с датчика скорости 7 начинает вводиться через сумматор 4 в усилительный тракт системы. Величина а коэффициент суммирования корректирующего сигнала (фиг. 2, д) выбираются достаточно большими по сравнению с величиной и коэффициентом суммирования сигнала ошибки. Поэтому в момент времени Ь- сигнал на выходе сумматора 4 меняет знак на противоположный, соответственно знаку корректирующего сигнале. За счет создания режима противовключения путем подключения глубокой жесткой обратной связи в момент 2 начинается интенсивное торможение в системе (участок на фиг. 2). При этом одновременно со снижением скорости и продолжающимся уменьшением сигнала ошибки происходит уменьшение сигнала на выходе дифференциатора 3, Момент включения жесткой обратной связи выбирается исходя из того чтобы при снижении ошибки до нулевого или установившегося значения скорость в системе успела уменьшится до нулевой или установившейся и чтобы время торможения в системе было минимальшлм. В реальной системе момент включения tj зависит от ее параметров (моментов нагрузки и инерции, редукции, постоянной времени усилителя и исполнительногг механизма) и выбирается соответствую- 5 Шим масштабу суммирования текущих зна- ijeHHft сигналов на входах сумматора 5. При этом пороговый сигнал и rtop |Г1О даваемый на сумматор 5 с выхода нульоргана 2, мало влияет на время включения 0 тормозящего сигнала, так как суммируется с очень мальтм коэффициентом, в реальных системах в 50-200 раз меньшим, чем да|угие сигналы. В момент времени tj Korfla скорость и ошибка принимают ус-15 тановившееся значение, сигнал на выходе диффарендиатора 3 становится близким к нулю, и следовательно, меньше порогового сигнала, задаваемого с выхода нульоргвна 2, С этого момента знак сигнала на выходе сумматора 5 снова меняется на первоначальный и ключ 8 закрывается За счет того, что пороговый сигнал задается с выхода нуль-органа 2, его сигнал оказывается автоматически синхронизированным со знаком сигнала ошиб ки. Как видно на вьяцеизложепного, в сист ме введена автоматическая зависимость начала торможения от-величины сигнала производной от ошибки, следователыю, от скорости отработки системой задающего сигнала с одной стороны и от величины скачкообразного изменения ошибки - с другой. Момент начала коррекции переходного процесса автоматически устанавливается таким, чтобы при снюкении ошибки до нулевого (установившегося) значения скорость отработки системой задающего сигнала уменьшилась до установившегося значения, после чего происходит отключение тормозящего сигнала скоростной обратной связи. В испытанной следящей системе, зам- кнутой по углу, задавались скачки ла ошибки в диапазоне от З до 60°. При этом наблюдалась форма переходного процесса, представленная на фиг. 2. Таким образом, в системе переходной гфоцесс корректируется автоматической регулировкой времени воздействия тормо- amiiero сигнала скоростной обратной связи в зависимости от величины скачкообразного изменения ошибки и от скорости ее изменения. изобретения р м у л а Система управления, содержащая взме- ритиль рассогласования, выход которого через последовательно соединенные пер. сумматор, усилитель и исполнитель гый механизм связан со входом объекта регулирования, датчик скорости объекта регулирования, выход которого через ключ подсоединен к входу первого сумматора, анализатор знаков сигналов, выход которого подключен к управляющему входу ключа, отличающаяся тем, что, с целью устранения перерегулирования в уменьшения времени переходного процесса системы при скачкообразном изменении ошибки, в систему введены дифференциатор, второй сумматор, первый и второй нульорганы, при этом выход измерителя рас- соглаоввания соединен со входами дифференциатора к второго нуль органа, выходы первого и второго подключе-, ны ко входам анализатора знаков, входы второго сумматора соединены с выходами измерктеля рассогласования, дифференциатора и второго нуль-органе, а выход- со входом первого нуль-органа. Источники информации, принятые во внимание при экспертиза 1.НелЕнейные корректирующие устройства в системах автоматического управлениг под ред, Топчеева, М., Машиностроение, 1971, с. 106-112. 2.Хл1,1пало Ei И. Нелинейные коррек- тирукхцне устройства в автоматических системах, М., Энергия, 1973, с 89, рис. 2-39 (прототип).
(L
cs
.
ЧЭ
Ж
J
/Ч
Ч
CTi
