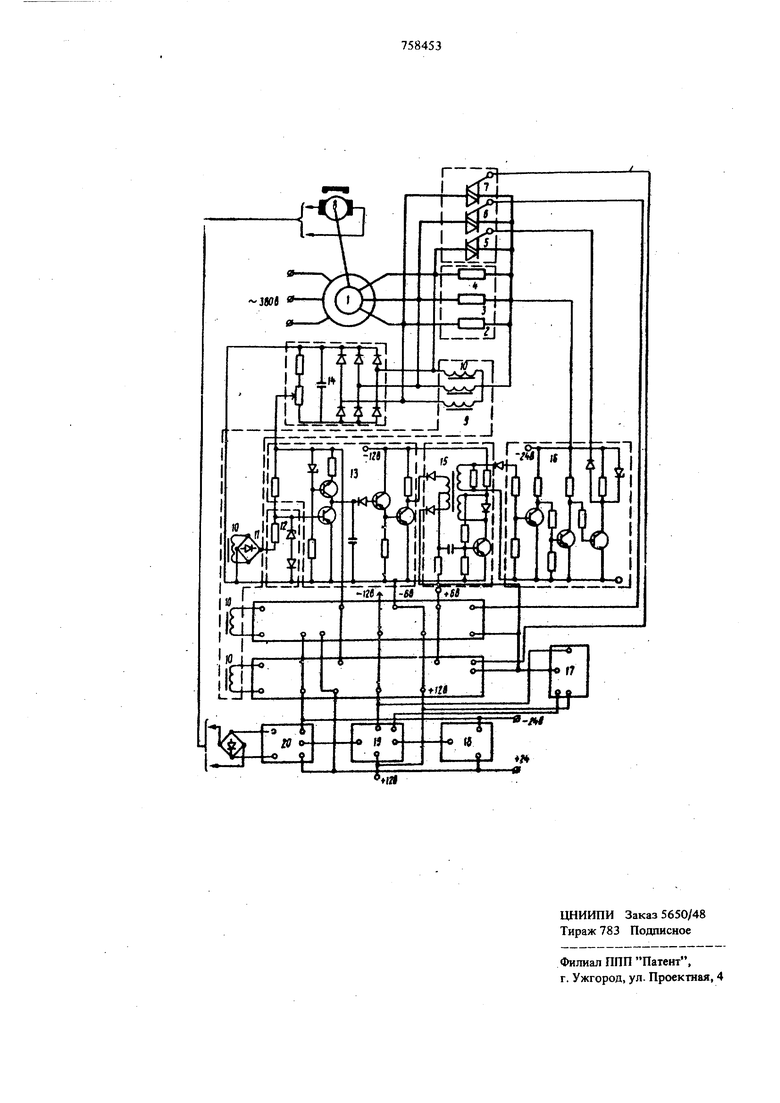
чены резисторы 2, 3 и 4 с параллельно подсоединенными симисторами 5, 6 и 7, датчика скорости 8 и трех импульсно-фазовых блоков управления, состоящих из бтцжа синхронизации 9, в который входят синхронизирующие трансформаторы 10, подключенные параллельно симисторам 5, 6 и 7. Однофазный мостовой выпрямитель 11 и ограничительная цепочка 12, генератора пилообразного напряжения 13, получающего питание от выпрямительного моста 14, подключенного к цепи ротора, последовательно соединенных нуль-органа 15, формирователя им пульсов 16, усилителя 17, блока задания 18, подключенного к входу сумматора 19, и согласующего каскада 20.
Устройство работает следующим образом. При подаче напряжения в цепь статора асинхронного трехфазного двигателя и при задающем напряжении U, двигатель будет работать на реостатной характеристике, определяемой резисторами 2, 3 и 4. Система импульснофазового управления в этом случае будет подавать на управляющие электроды симисторов лищь тактовые импульсы, которые вырабатываются при переходе напряжений ротора через нуль. В течение ка ждого полупериода симиСторы за1Герты и в цепи ротора находится полное добавочное сопротивление.
Для работы на заданной скорости в блоке задания 18 устанавливают определенную величину задающего напряжения. Это напряжение поступает в сумматор 19, ;а разность двух напряжений Uj-Ujjj, поступает в усилитель 17, где и - задающее напряжение, соответствующее выбранной скорости; U - напряжение обратной связи по скорости, снимаемое с датчика скорости 8.
Усиленное напряжение подается на один из входов нуль-органа 15.
На второй вход сравнивающего устройства подается напряжение генератора 13.
Начало заряда конденсатора генератора 13 строго синхронизированно с моментом перехода полуволны фазного напряжения через нуль, что достигается благодаря наличию синхронизирующих трансформаторов 10 и однофазного мостового выпрямителя 11. Скорость заряда конденсатора, а следовательно, и наклон пилы изменяются в соответствии с изменением периода фазного напряжения, что позволяет автоматически компенсировать изменение угла регулирования при изменении частоты фазного напряжения. Указанный зффект достигается блгодаря питанию генератора пилообразного напряжения от трехфазного мостового выпрямительного моста 14, подключенного к роторной цепи.
На входе нуль-органа 15, когда напряжение пилообразной формы станет равным напряжению, поступающему из усилителя 17, формирователем 16 вырабатывается управляющий импульс., , Усиленные импульсы управления включают коммутируюише симисторы 5. 6 и 7, которые закорачивают резисторы 2, 3 и 4 ротора в каждый полупериод фазного напряжения.
В установивщемся режиме асинхронный двигатель работает на искусственной механической характеристике, которая определяется величиной расчетного активного сопротивления ротора, зависящей от скважности коммутации.
Скважность определяется величиной угла регулирования а, который может изменяться в данном устройстве от 180 и до 10°.
В устройстве для регулирования скорости асинхронного двигателя с изменением скольжения изменяется напряжение выпрямительного моста 14, питающего генератор пилообразного напряжения 13, что приводит соответственно к изменению наклона пилы и угла управления симисторами 5, 6, 7 и позволяет
повысить точность поддержания заданной скорости.
Ф О
рмула изобретения
Устройство для регулирования скорости трехфазного асинхронного двигателя с фазным ротором, содержащее резисторы, соединенные звездой и подключенные к обмоткам ротора, симисторы, подключенные параллельно резисторам, три блока импульсно-фазового управления, состоящие из последовательно соединенных блока синхронизации, подключенного параллельно симисторам генератора пилообразного напряжения, нуль-органа и формирователя импульсов, подключенного к управляющей цепи симисторов, сумматор, один вход которого соединен с датчиком скорости двигателя, а другой с блоком задания, выход сумматора соединен с управляющими входами блоков импульснофазового управления через усилитель, отличающееся тем, что, с целью повыщения точности регулирования, введен выпрямитель, вход которого соединен с обмотками ротора, а выход подключен к генератору пилообразного напряжения.
Источники информации, принятые во внимание при экспертизе
1.Патент Японии № 43-12856, кл. 55 С 222, опублик. 1968.
2.Петров Л. П. и др. Моделирование асинхронных электроприводов с тиристорным управлением, М., Энергия, 07.01.77, с. 144- Il47, 181.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования скорости трехфазного асинхронного двигателя с фазным ротором | 1982 |
|
SU1116515A2 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПЕРЕМЕННОГО ТОКА | 1992 |
|
RU2025037C1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1991 |
|
RU2056699C1 |
| Реверсивный асинхронный электропривод | 1988 |
|
SU1539951A1 |
| Устройство для регулирования частоты вращения асинхронного двигателя с фазным ротором | 1985 |
|
SU1339856A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 2006 |
|
RU2300169C1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| Устройство для регулирования скорости асинхронного электродвигателя | 1981 |
|
SU1001410A1 |
| Способ синхронизации асинхронного электродвигателя | 1980 |
|
SU955485A1 |