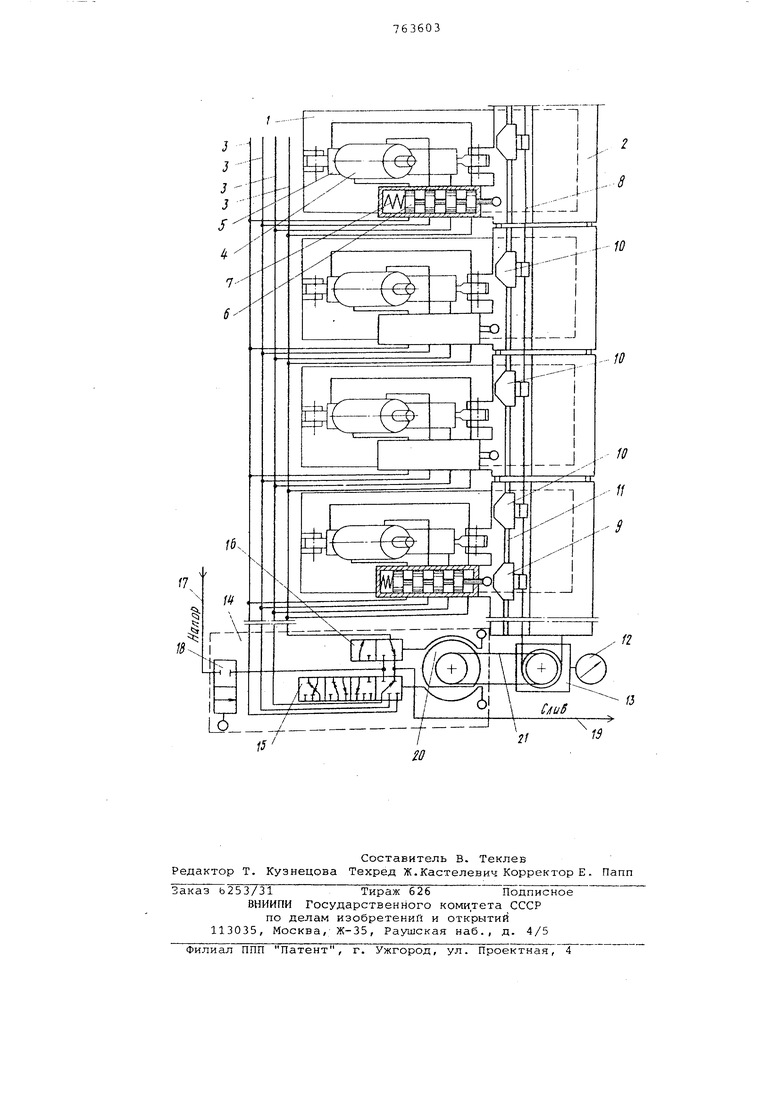
Изобретение относится к горному делу и предназначено для подземной механизации добычи угля. Известна система дистанционного управления механизированными крепями где применены многопозиционные гидро распределители, установленные на каж дой секции для управлениягидроцилин рами секций от напорной и сливной ма гистралей jlj . Наиболее близким техническим реше нием к предлагаемому изобретению является устройство дистанционного управления многопозиционкыми распределителями, содержащее трубопроводы, расположенные в лаве и на штреке, гидрораспределители, гидроблок, гибкую управляющую цепь с толкателями, индикатор положения толкателя pj, Недостатком известных устройств является наличие разветвленной коммутации на секциях крепи и низкая нгщежность переключения многопозиционных гидрораспределителей. Целью изобретения является эффективность управления крепью за счет повышения надежности гидрораспределителей. Цель достигается тем, что система снабжена дополнительными трубопроводами по числу выполняемых операций по управлению крепью, которые соединены с силовыми гидроцилиндрами секции через гидрораспределители, выполненные двухпозиционными, а с трубопроводами, расположенными на штреке через гндроблок. На чертеже изображена схема системы дистанционного управления применительно к конструкции механизированной крепи с одностоечными секциями (типа ОМКТМ, ОКП). Вдоль крепи, секции 1 которой объединены базой 2, проложен комплект функциональных трубопроводов 3, по одному на каждую рабочую операцию стойки 4 и гидродомкрата 5. Подключение стойки и гидродомкрата к функциональным трубопроводам производится двухходовыми гидрораспределителя1 1и 6, установленными на базе 2 с интервалами, равными расстоянию межлу секциями. При отсутствии управляющего воздействия гидроклапаны закрыты пружинами 7. для открывания гидроклапанов применена управляющая цепь 8 с кулаками 9, 10, перемещающимися по направляющим
11, укрепленным на базе. Операции управления движением элементов секции выполняются кулаком 9, по перемещению которого ведется индикация управляемых секций при помощи счетчика 12, связанного с приводом 13 управляющей цепи. Групповое включение гидродомкратов 5 при передвижке базы выполняется .кулаками 10, установленными на цепи 8 со смещением по шагу относительно кулака 9, например, на половину расстояния между секциями. При необходимости группового управления движением элементов секций устанавливается группа кулаков 9.
В гидроблоке 14 для управления движением элементов секций предусмотрен распределитель 15, а для передвижки базы- - переключатель 16, подключенные к напорному трубопроводу 17 через общий отсекатель 18, а к сливному трубопроводу 19 непосредственно. Для предотвращения возможности включения распределителя 15 при групповой коммутации секций с помощью кулаков ГО в конструкцию гидроблока введено блокирующее устройство 20, связанное передачей 21 с приводом цепи таким образом, что цикл действия устройства соответствует перемещению кулака между отсекателчми двух соседних секций крепи.
При необходимости обеспечения подпора в процессе передвижки секций, каналы распределителя коммутируются по известным принципам специальными клапанами (не показаны).
Для контроля состояния крепи в забое используется комплект телевизионной аппаратуры (не показан), телекамера которого устанавливается на выемочной машине (не показана) с ориентацией в направлении базы.
Система действует cлeдsющим образом.
В исходном положении кулаки 9, 10 управляющей цепи 8 смещены относително гидрораспределителя 6, которые закрыты пружинами 7. .
Распределитель 15 и переключатель 16 заблокированы блокирующим устройством 20, находящимся в промежуточном положении. При установке кулака 9 против гидрораспределителя выбранной секции, что отмечается счетчиком 12, гидрораспределитель открывается, стока 4 и гидродомкрат 5 подключаются к .трубопроводам 3. Блокирующее устройство освобождает распределитель 15, оставляя переключатель 16 заблокированным. Поршневая полость гидродомкрата 5 через открытый канал заблокированного переключателя соединена со сливом. Последовательными установками распределителя 15 в нужные положения и включением после каждой установки общего отсекателя 18 выполняют
ся все операции, связанные с перед- вижкой секции и креплением кровли, после чего кулак 9 может быть перемещен к следующей секции.
При установке группы кулаков 10 против группы гидрораспределителей она открывается, подготавливая соот ветствующие гидродомкраты к действию. Блокирующее устройство 20 освобождает переключатель 16 и блокирует распределитель 15. Штоковые полости группы гидродомкратов подключены к сливу через открытый канал заблокированного распределителя. После установки переключателя на передвижку базы и включения общего отсекателя 18 рабочая жидкость поступает в поршневые полости гидродомкратов, осуществляя передвижку соответствующего участка базы. Изменение величины участка базы, передвигаемого за одну операцию, производится удалением части кулаков или установкой дополнительных кулаков во время выхода соответствующих участков цепи 8 на один из выемочных штреков. Усилия в гидродомкратах в процессе управления контролируются по манометру (не показан), помещенному на гидроблоке. При повышении в закрытых стойках сверх допустимого значения срабатывают предохранительные клапаны (не показаны), помещенные между полостями стоек.
Надежность двухпозидионных гидрораспределителей и дополнительных напорных трубопроводов выше, чем дистанционно управляемых многопозиционных гидрораспределителей.
Формула изобретения
1. Система дистанционного управления механизированной крепью, содержащая трубопроводы, расположенные в лаве и на штреке, гидрораспределители, гидроблок, гибкую управляющую цепь с толкателями, индикатор положения толкателя, .отличающаяся тем, что, с целью эффективности управления крепью за счет повышения нащежности гидрораспределителей, она снабжена дополнительными трубопроводами по числу выполняемых операций по управлению крепью, которые соединены с силовыми гидроцилиндрами секции через гидрораспределители, выполненные двухпозиционными, а с трубопроводами, расположенными на штреке - через гидроблок.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
375386, кл. Е 21 D 23/16, 15.06.70.
2.Авторское свидетельство СССР
№ 303445, кл. Е 21 D 23/00, 24.11.70 (прототип).
/
16
IS
Г/
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство дистанционного управления секцией механизированной крепи | 1981 |
|
SU1010287A1 |
| Гидравлическая система группового управления секциями шахтной крепи | 1978 |
|
SU752037A1 |
| ГИДРОСИСТЕМА СЕКЦИИ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1999 |
|
RU2161254C1 |
| Двухканальная система управления механизированной крепью | 1989 |
|
SU1710771A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДОЛИНСКОГО МКД, СИСТЕМА УПРАВЛЕНИЯ КРЕПЬЮ, МЕЖСЕКЦИОННАЯ ЗАТЯЖКА КРЕПИ, ГИДРОСИСТЕМА КРЕПИ | 1999 |
|
RU2181842C2 |
| Устройство для управления секцией гидрофицированной крепи | 1989 |
|
SU1705589A1 |
| Система контроля переднего положения секций механизированной крепи | 1987 |
|
SU1514956A1 |
| Секция механизированной крепи | 1985 |
|
SU1308766A1 |
| Система управления секциями крепи угледобывающего агрегата | 1986 |
|
SU1320444A1 |
| Гидросистема механизированной крепи | 1986 |
|
SU1435796A1 |