1
Изобретение относится к области машиностроения, в частности к гидравлическим следящим системам управления исполнительными механизмами, и может быть использовано в промышленных работах, станках с числовым программным управлением.
Известен гидропривод, содержащий исполнительный гидроцилиндр, питаемый дозирующими гидроцилиндрами, взаимодействующими через рычажную передачу с приводным валом, программное устройство и электрогидравлическую следящую систему {.
Недостатком известного гидропривода является сложность конструкции и невысокий КПД, обусловленные значительным числом дозирующих гидроцилиидров и рычажных передач.
Цель изобретения - повышение КПД и упрощение конструкции привода.
Это достигается тем, что привод дополнительно содержит подвижную опору, установленную на рычажной передаче, толкатели и клиновую передачу, на каждом клине которой выполнены подвижные упоры, связанные с программным устройством и взаимодействующие с толкателем, причем под(54) ГИДРОПРИВОД
вижная опора кинематически связана через клиновую передачу с толкателем. Кроме того, ряд построения клиновой передачи выполнен на основе двоичной системы счисления, а подвижные упоры связаны с програмным устройством через электромагниты, имеющие исполнительную и блокирующую об.мотки.
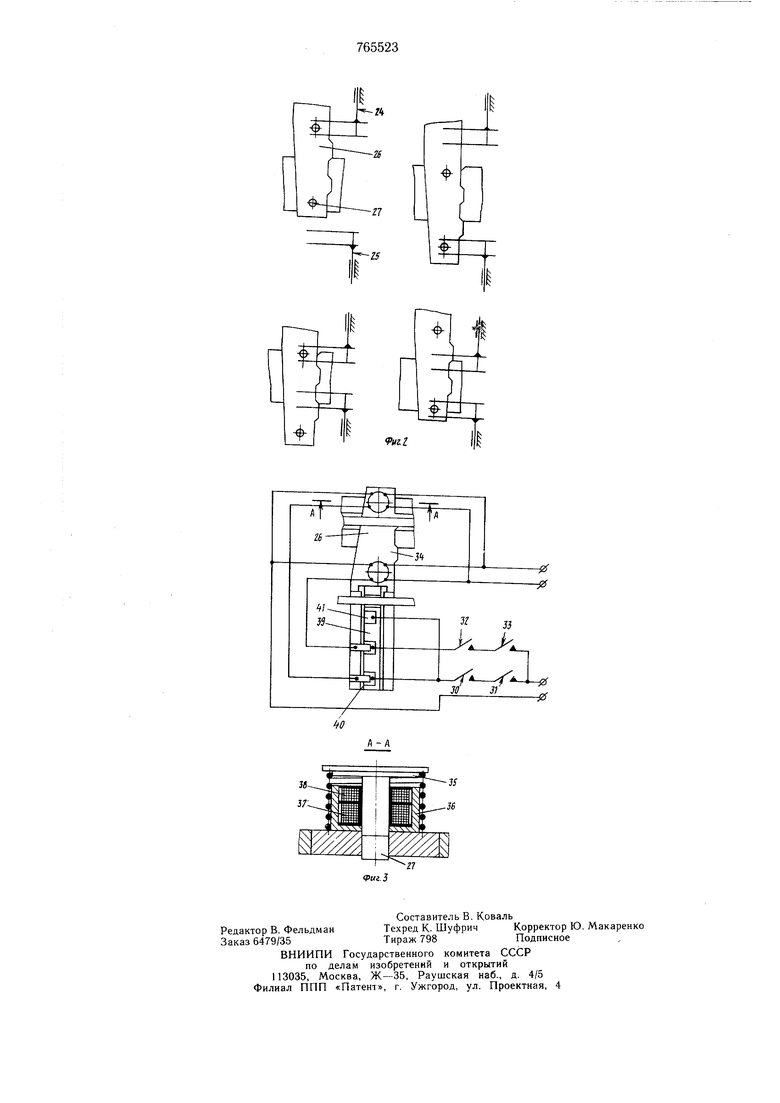
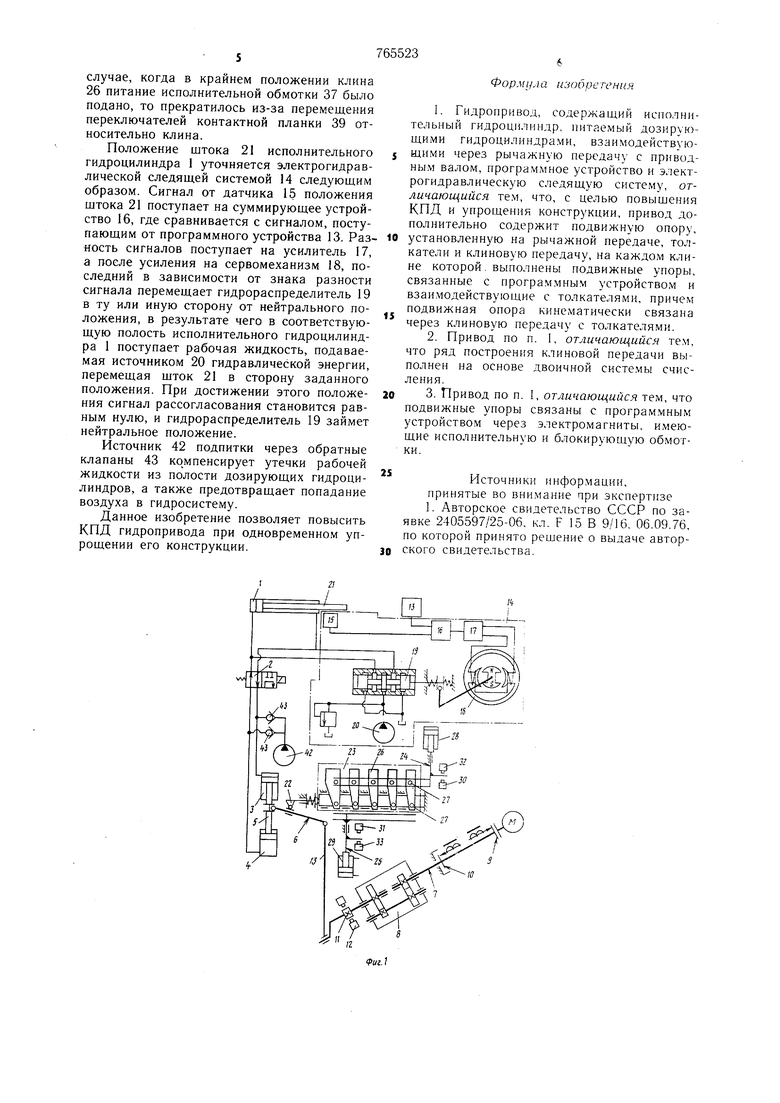
На фиг. 1 представлена принципиальная схема гидропривода; на фиг. 2 - возможные положения отдельного клина и тол10кателей; на фиг. 3 - конструкция клина.
Гидропривод содержит исполнительный гидроцилиндр 1, питаемый через гидрораспределитель 2 дозирующими гидроцилиндрами 3 и 4, связанными общим штоком 5, взаимодействующим через рычажную передаtsчу 6 с общим приводным валом 7. На общем приводном валу 7 установлены редуктор 8, управляемая муфта 9, тормоз 10, кулачок 11 и путевые выключатели 12. Привод также включает программное устройство 13 и электрогидравлическую следящую систему 14, сос20тоящую из датчика 15, суммирующего устройства 16, усилителя 17, сервомеханизма 18, гидрораспределителя 19 и источника 20 гидравлической энергии. Датчик 15 определиет полол енис штока 2J исчюлиитсльного гидроцилиидрн 1. Рычажная передача 6 имеет подвижную опору 22, кинематически евязанную через клиновую передачу 23 с толкателями 24 и 25. Клиновая передача 23 еодержит клинья 26, причем ряд гихтроения клиповой передачи вынолкеп па основе двоичной системы счисления, т. е. каждый последующий клин имеет длину хода в направлении переменхения опоры 22 в два раза больше предыдущего, и на каждом клине выполнены подвижные упоры 27; при помон 1И которых эти клинья могут быть связаны с толкателями 24 и 25, движуо;имися в противоположных направлениях. Для перемещения этих толкателей можно иснользовать, например, пневмогидроцилиндры 28 и 29. В крайних положениях толкатели 24 и 25 вклю чают с)ответствуюн;ие путевые гзыклЮЧатеЛи 30 и 31 или 32 и 33. На пове|5хности клиНьев 26 выпо;1нены выступы 34 и пазы (на чертеже не показаны). Подвижные упоры 27 установлены на якорях 35 электромагнитов 36, расположенных на клиновой передаче 23. Этп электромагниты имеют исполнительную обмотку 37 и блокирующую обмотку 38. Исполпительпая обмотка 37 выполнена с число.м ампервитков, обеспечивающим притяжения якоря 35 электромагнита 36, блокируюнхая обмотка 38 - с числом амнервитКов, обеспеч11ваюп1пм удержание якоря 35 в притянутом состоянии. Питание блокирующей обмотки 38 подводится непосредственно от программного устройства 13, а испо., обмотки 37 - через переключаюндую контактную планку 39. Эта планка установлена на клиновой передаче 23 в направляющих 40 с возможностью перемепения отпосительпо клина 26 в направлении, перне1;дикулярном к направлению перемещения оноры 22. На планке 39 расположены контакты площадки 41, установлекнь е с LuaroM, paBiHii.M длине хода клипа 26, отпоспте.ч1)По планки 39. Напряжение к площадкам 41 подводи1ся от програм.мпого устройства 13 через путевые вык;гючатели: к крайпим плоидадкам - - через выключатели 30 и 31, к средней через выключатели 32 и 33. Утечки рабочей жидкости компенсируются источником 42 подпитки, через обратные клапаны 43. Гидронривод работает следующим обраДействия привода поясняются с момента вре.мени, когда UJTOK 21 исполнительного гидр01,илиндра 1 занял какое-то заданное положепие. При этом приводпой вал 7 тормозом 10 зафиксирован в одном из крайних положений, рычажная нередача 6 и шток дозирующих гадропилиндров 3 н 4 также нахоД5Г1ся в одном из крайних по.ложепий. Электро|-идравлическая следящая система 14 поддерживает заданиое .ммным устройСТ150М 13 положение П1тока 21. Гидрораспределитель 2 занимает такую позицию, при которой дозируюп1,ис 1идроди«1индры 3 и 4 сое динены между собой. Сначала рассмотрим случай, когда дальней пее направление движения щтока 21 совпадает с ранее выполненным. В этом случае после перевода гидрораспределителя 2 в соответствующее положение, выключается тормоз 10 и включается управляемая муфта 9. Общий приводной вал 7, а следовательно, и рычажная передача 6, взаимодействующая со щтоком 5, переходят в другое крайнее положение. При подходе к этому положению путевы.ми выключателями 12 выключается управляемая муфта 9 и включается тормоз 10. После фиксации общего приводного вала 7 от программного устройства 13 подается команда на включение соответствующих электромагнитов 36 (в зависимости от необходимой величины хода штока 21). После включения этих электромагнитов 36 толкатели 24 и 25, находящиеся до этого в одном из крайних положений, переводятся пневмогидроцилиндрами 28 и 29 в другое крайнее положение. Толкатели 24 и 25 перемещают соответствующие клинья 26 вперед или назад согласно программе. В своих крайних положениях клинья 26 фиксируются своими выступа.ми 34; входящими в пазы. После перевода толкателей 24 и 25 подается команда перевод гидрораспределителя 2 в другое положение, при котором дозирующие гидронилиндры 3 и 4 соединяются с исполнительным гидроцплиндром 1. Если направление следующего движения 1птока 21 противоположно выполненному, то после перевода гидрораспределителя 2 в исходное по.тожепие от программного устройства 13 подается команда включения соответствующих электромагнитов 36 и выполняются все следующие после действия указанные выпш для первого случая. При выполнении приводом следу.ющего сдвижения подается команда на выключение тормоза 10, включение управляемой муфты 9,в результате чего щток 5 дозирующих гидроцилиндров 3 и 4 переходит в другое крайнее положен11е. При этом щток 21 исполнительного гидроцилиндра i перемещается в противоположную сторону на определенную величину. При подводе общего приводного вала к крайнему положению, как и нрежде, путевыми выключателями 12 выключается управляемая .муфта 9 и включается тормоз 10.Шток 21 занимает фиксированное положение. Подача напряжения исполнительным обмоткам 37 электромагнитов 36 через переключа юи1ие контактную планку 39 и путевые выключатели 30-33 обеспечивает возможность включения обмоток именно тех электромагнитов, подвижных упоры 27 которых находятся против паза толкателя 24 и 25. Блокирующая обмотка 38 каждого электромагнита 36 обеспечивает удержание якоря 35 в притянутом состоянии в таком
случае, когда в крайнем положении клина 26 питание исполнительной обмотки 37 было подано, то прекратилось из-за перемещения переключателей контактной планки 39 относительно клина.
Положение штока 21 исполнительного гидроцилиндра 1 уточняется электрогидравлической следящей системой 14 следующим образом. Сигнал от датчика 15 положения штока 21 поступает на суммирующее устройство 16, где сравнивается с сигналом, поступающим от программного устройства 13. Разность сигналов поступает на усилитель I7, а после усиления на сервомеханизм 18, последний в зависимости от знака разности сигнала перемещает гидрораспределитель 19 в ту или иную сторону от нейтрального положения, в результате чего в соответствующую полость исполнительного гидроцилиндра 1 поступает рабочая жидкость, подаваемая источником 20 гидравлической энергии, перемещая щток 21 в сторону заданного положения. При достижении этого положения сигнал рассогласования становится равным нулю, и гидрораспределитель 19 займет нейтральное положение.
Источник 42 подпитки через обратные клапаны 43 ко мпенсирует утечки рабочей жидкости из полости дозирующих гидроцилиндров, а также предотвращает попадание воздуха в гидросистему.
Данное изобретение позволяет повысить КПД гидропривода при одновременном упрощении его конструкции.
Формул и изооре гения
1. Гидропривод, содержащий исполнительный гидроцилиндр, питаемый дозирующими гидроцилиндрами, взаимодействующими через рычажную передачу с приводным валом, nporpaMjMHoe устройство и электрогидравлическую следящую систему, отличающийся те.м, что, с целью повышения КПД и упрощения конструкции, привод дополнительно содержит подвижную опору,
установленную на рычажной передаче, толкатели и клиновую передачу, на каждом клине которой, выполнены подвижные упоры, связанные с программным устройством и взаимодействующие с толкателями, причем подвижная опора кинематически связана через клиновую передачу с толкателями.
2.Привод по п. 1, отличающийся тем, что ряд построения клиновой передачи выполнен на основе двоичной системы счисления.
3.Привод по п. I, отличающийся тем, что подвижные упоры связаны с програм.мным устройством через электромагниты, имеющие исполнительную и блокирующую обмотки.
Источники 1шформации,
принятые во вни.мание при экспертизе 1. Авторское свидетельство СССР по заявке 2405597/25-06. кл. F 15 В 9/16. 06.09.76, по которой принято решение о выдаче авторского свидетельства.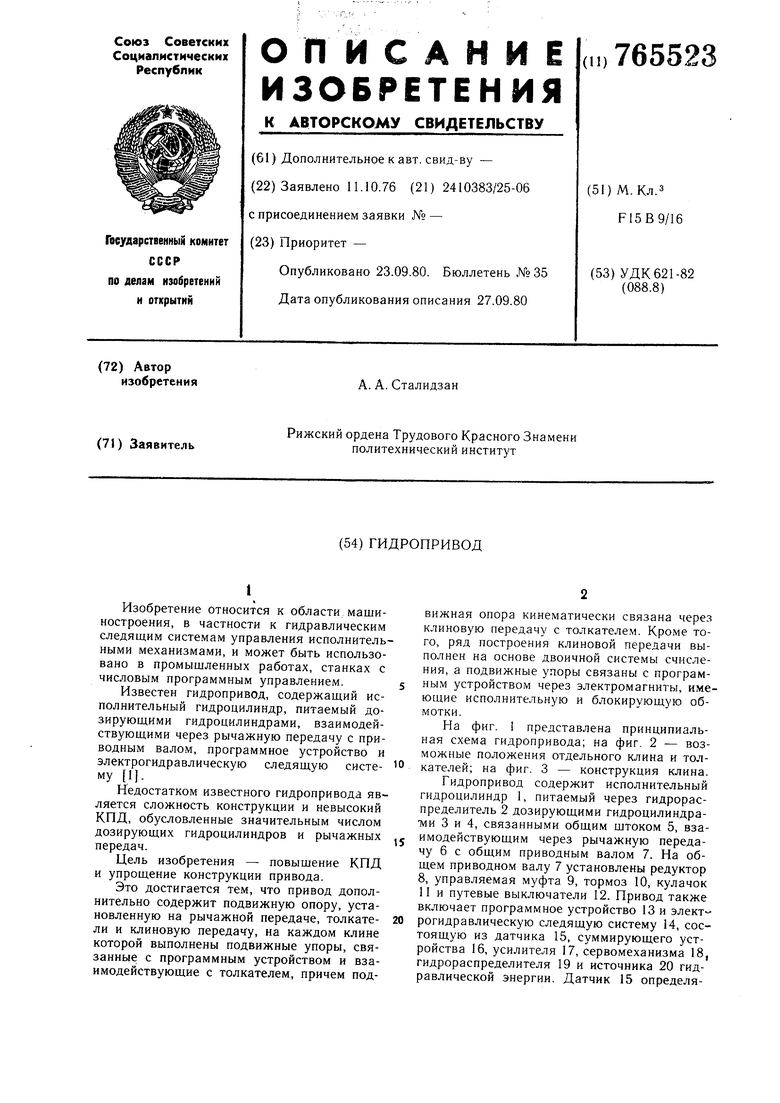
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод | 1976 |
|
SU765522A1 |
| Электрогидравлический следящий привод | 1977 |
|
SU920267A1 |
| ПРЕСС СРАЩИВАНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ КЛЕЕНОГО БРУСА | 2001 |
|
RU2180883C1 |
| ПРЕСС СРАЩИВАНИЯ ДРЕВЕСИНЫ ПО ДЛИНЕ | 2001 |
|
RU2181662C1 |
| Устройство для вертикальной регулировки валка прокатной клети | 1986 |
|
SU1386322A1 |
| Механизм регулировки жалюзных решет очистки зерноуборочного комбайна | 1985 |
|
SU1371605A1 |
| Костылезапрессовщик | 1984 |
|
SU1216269A1 |
| Электрогидравлическая система привода двустворчатых ворот шлюза | 1991 |
|
SU1775527A1 |
| Гидропривод | 1986 |
|
SU1323328A1 |
| Гидропривод затвора гидротехнического сооружения | 1989 |
|
SU1684409A1 |