(54) ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД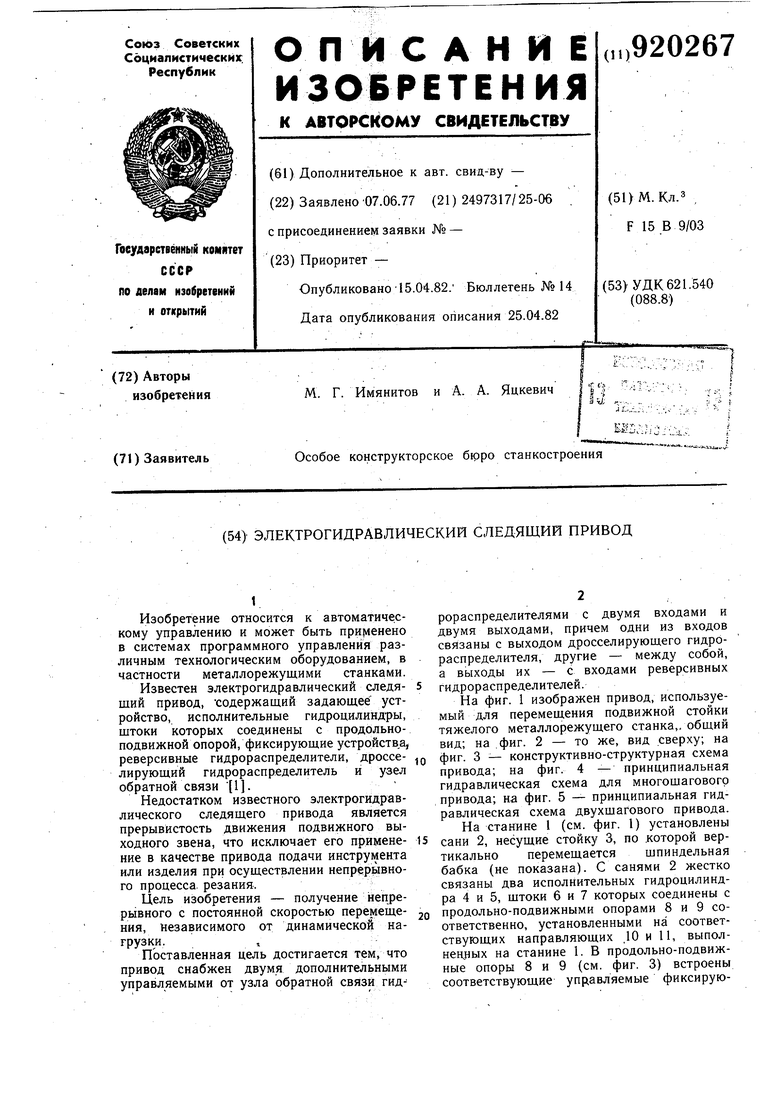
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод | 1976 |
|
SU765523A1 |
| Многоканальный электрогидравлический следящий привод | 1989 |
|
SU1642099A1 |
| ЧЕТЫРЕХЛИНЕЙНЫЙ ТРЕХПОЗИЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С РЕЗЕРВИРОВАННЫМ ЭЛЕКТРОУПРАВЛЕНИЕМ ПРИВОДА ПОВОРОТА КОЛЕС ПЕРЕДНЕЙ ОПОРЫ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОДЕМПФЕРОМ | 2007 |
|
RU2342283C1 |
| Самоподнастраивающийся линейный шаговый электрогидравлический привод | 1975 |
|
SU735832A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2004 |
|
RU2272181C1 |
| Стенд для исследований гидронавесных систем тракторов | 1979 |
|
SU855259A1 |
| Гидропривод скрепера | 1975 |
|
SU781103A1 |
| ГИДРОМЕХАНИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2007 |
|
RU2372216C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С ТРЕХКАСКАДНЫМ ЭЛЕКТРОГИДРОУСИЛИТЕЛЕМ | 2012 |
|
RU2505715C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2815567C1 |
1
Изобретение относится к автоматическому управлению и может быть применено в системах программного управления различным технологическим оборудованием, в частности металлорежущими станками.
Известен электрогидравлический следя- 5 ший привод, содержащий задающее устройство, исполнительные гидроцилиндры, штоки которых соединены с продольноподвижной опорой, фиксирующие устройству, реверсивные гидрораспределители, дросселирующий гидрораспр.еделитель и узел обратной связи .
Недостатком известного электрогидравлического следящего привода является прерывистость движения подвижного выходного звена, что исключает его примене- 15 ние в качестве привода подачи инструмента или изделия при осуществлении непрерывного процесса, резания.
Цель изобретения - получение непрерывного с постоянной скоростью перемеще- о ния, независимого от динамической нагрузки.,
Поставленная цель достигается тем, что привод снабжен двумя дополнительными управляемыми от узла обратной связи гидрораспределителями с двумя входами и двумя выходами, причем одни из входов связаны с выходом дросселирующего гидрораспределителя, другие - между собой, а выходы их - с входами реверсивных гидрораспределителей.
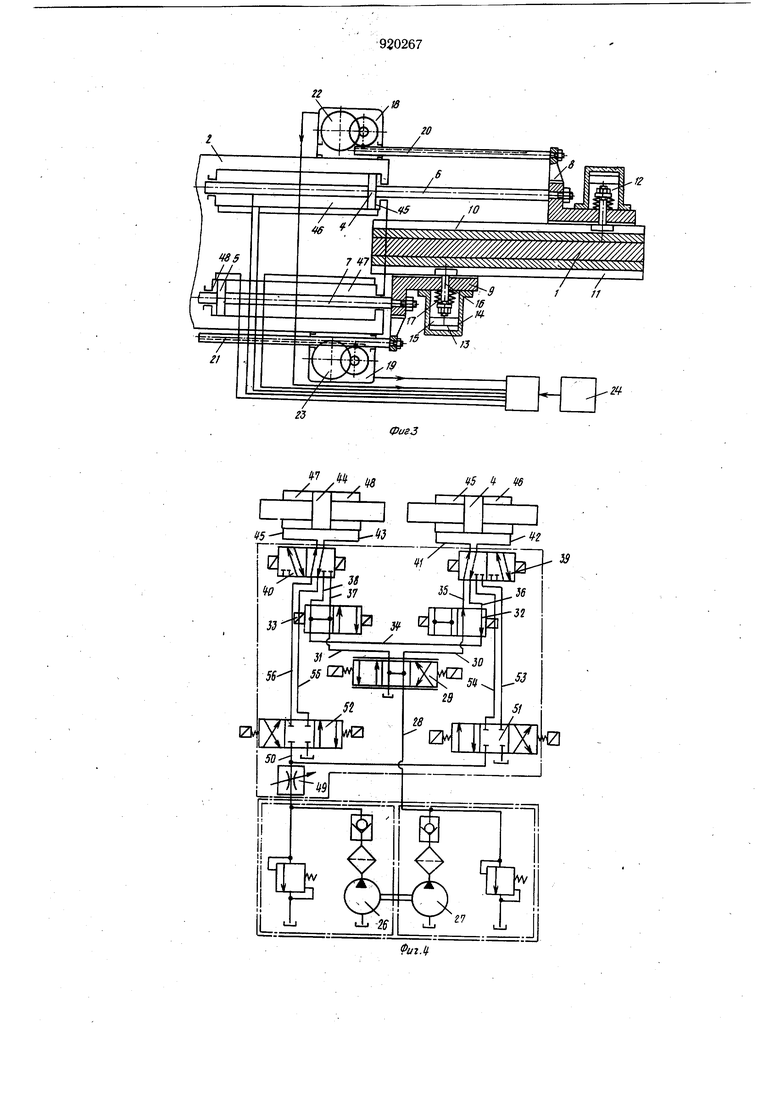
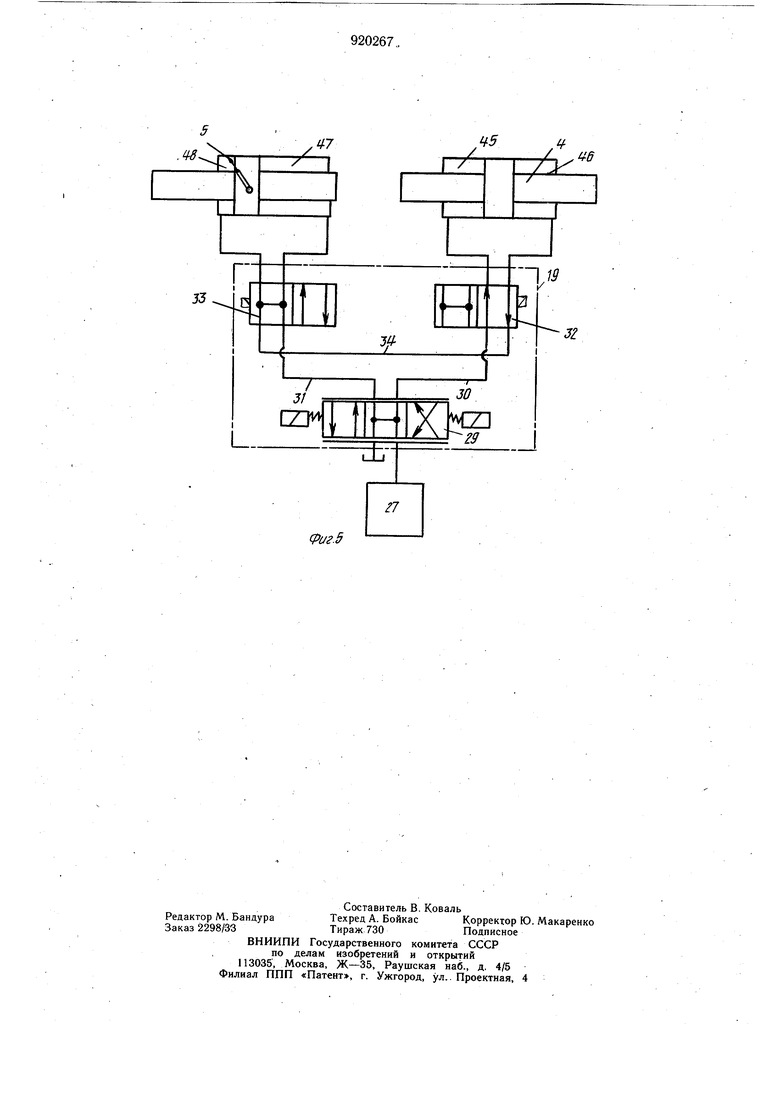
На фиг. 1 изображен привод, используемый для перемещ;ения подвижной стойки тяжелого металлорежущего станка,, общий вид; на .фиг. 2 - то же, вид сверху; на фиг. 3 - конструктивно-структурная схема привода; на фиг. 4 - принципиальная гидравлическая схема для многощаговогр привода; на фиг. 5 - принципиальная гидравлическая схема двухщагового привода.
На станине 1 (см. фиг. 1) установлены сани 2, несущие стойку 3, по .которой вертикально перемещается щпиндельная бабка (не показана). С санями 2 жестко связаны два исполнительных гидроцилиндра 4 и 5, щтоки 6 и 7 которых соединены с продольно-подвижными опорами 8 и 9 соответственно, установленными на соответствующих направляющих ,10 и 11, выполнещ1ых на станине 1. В продольно-подвижные опоры 8 и 9 (см. фиг. 3) встроены соответствующие управляемые фиксирующие устройства 12 и 13, каждое из которых выполнено в виде гидроцилиндра 14, поршня 15, связанного с направляющей 16, и тарельчатой пружины 17. Для выдачи командных электрических сигналов, управляющих включением в работу того или другого исполнительного гидроцилиндра 4 или 5, а также фиксирующими устройствами 12 и 13, привод имеет узел обратной связи, состоящий из двух одинаковых командоаппаратов 18 и 19 (см. фиг. 3), кинематически , связанных со своей продольно-подвижной о-порой 8 и 9 соответствующими щтангами 20 и 21, и двух одинаковых кулачковых дисков 22 и 23, каждый из которых поворачивается за полный ход щтока 6 или 7 на угол менее 360°, и взаимодействующих с неподвижными контактными парами или бесконтактными элементами, расположенными вокруг каждого диска (не показаны). Управление перемещением саней 2 по станине 1 производится от задающего устройства 24 (см. фиг. 3) и не связано с работой узла обратной связи по положению щтоков 6 и 7 исполнительных гидроцилиндров 4 и 5, действующего независимо и автоматически. На конце станины .1 установлен путевой выключатель 25 для отключения соответствующего командоаппарата 18 или 19 на протяжении крайнего числа привода. Электрогидравлический следящий привод включает два источника 26 и 27 гидравлической энергии (см. фиг. 4), причем источник 26 имеет высокую производительность и низкое давление, а источник 27 - малую производительность и высокое давление. Источник 27 гидролинией 28 с подводом дросселирующего гидрораспределителя 29, а выходы последнего гидролиниями 30 и 31 соединены с одним из входов дополнительных гидрораспределителей 32 и 33, причем два других входа последних гидролинией 34 соединены между собой, а выходы их соответствующими гидролиниями 35, 36, 37 и 38 соединены со входами реверсивных гидрораспределителей 39 и 40. Дополнительные гидрораспределители 32 и 33 выполненыуправляемыми от командоаппаратов 18 или 19, входящих в узел обратной связи. Выходы реверсивных гидрораспределителей 39 и 40 связаны гидролиниями 41-44 с соответствующими рабочими полостями 45-48 исполнительных гидроцилиндров 4 и 5. Источник 26 через регулируемый гидродроссель 49 и гидролинию 50 связан со входом гидрораспределителей 51 и 52. Причем выходы гидрораспределителя 51 связаны гидролиниями 53 и 54 с соответствующими входами реверсивного гидрораспределителя 39, а выходы гидрораспределителя 52 гидролиниями 55 и 56 связаны с соответствующими входами реверсивного гидрораспределителя 40. Электрогидравлический следящий привод работает следующим образом. В крайнем левом положении саней 2, например, продольно-подвижная опора 8 зажата фиксирующим устройством 12 к направляющей 10, продольно-подвижная опора 9 имеет возможность свободно перемещаться по направляющей И. При подаче команды с задающего устройства 24 сани 2 и вместе с ними стойка 3 приводится и движение исполнительным Гидроцилиндром 4, рабочая полость 45 которого соединена через дросселирующий гидрораспределитель 29, дополнительный гидрораспределитель 32, реверсивный гидрораспределитель 39 с источником 27, а рабочая полость 46 - через реверсивный гидрораспределитель 39, дополнительные гидрораспределителк 32 и 33 и дросселирующий гидрораспределитель 29 со сливом. Сани 2 перемещаются справа налево (см. фиг. 1). При этом рабочая полость 47 исполнительного гидроцилиндра 5 соединена через реверсивный гидрораспределитель- . 40, гидрораспределитель 52, гидродроссель 49 с источником 26, а рабочая полость 48 - через указанные гидрораспределители со сливом. Шток 7 исполнительного гидроцилиндра 5 перемещается справа налево (см. фиг. 1). Затем переключаются гидрораспределитель 52 и реверсивный гидрораспределитель 40. При этом полости 47 и 48 соединены .между собой и со сливом, и движение щтока 7 прекращается. Перемещение саней 2 контролируется командоапцаратом 18, и когда величина перемещения составляет значительную часть от возможного перемещения исполнительного гидроцилиндра 4, командоаппарат 18 формирует сигнал на управление .фиксирующим устройством 13, вследствии чего зажимается продольно-подвижная опора 9, и на дополнительный гидрораспределитель 33, при этом рабочая полость 46 связана с рабочей полостью 47 через реверсивные гидрораспределители 39, 40 и дополнительные гидрораспределители 32 и 33, в результате чего на протяжении некоторого отрезка пути саней 2 работают gg исполнительных гидроцилиндра 4 и 5 - каждый с половинным усилием. Далее сигнал с командоаппарата 18 поступает на дросселирующий гидрораспределитель 29, дополнительный гидрораспределитель 32, реверсивный гидрораспределитель 39 и фиксирующее yctpoйcтвo 12, при этом включается в работу исполнительный гидроцплпндр о. рабочая полость 47 которого через реверсивный гидрораспределитель 40. дополнительный гидрораспределитель 33 и дросселирующий гидрораспределитель ,29 соединена с источником 27, а рабочая полость 48через указанные гидрораспрелелители со сливом.
Исполнительный гидроцилиндр 5 работает с полным усилием и перемещает сани 2 также справо налево, и по прохождению некоторого пути командоаппарат 19 формирует управляющий сигнал на гидрораспределитель 51.
Рабочая полость 46 исполнительного гидроцилиндра 4 соединяется через реверсивнь1Й гидрораспределитель 39, гидрораспределитель 51, гидррдроссель 49 с источником 26,. а рабочая полость 45 - через указанные гидрораспределители со сливом, при этом осуществляется быстрый перегон штока 6 в исходное положение. Если с задающегО устройства 24 не поступило сигнала реверса, то движение саней 2 продолжается в ту же-сторону, и когда исполнительный гидроцилиндр 5 и вместе с ним сани 2 пройдут значительную часть возможного перемещения, командоаппарат 19 формирует сигнал на прсл,едовательное управление п дрораспрёделителем 51, реверсивным гидрораспределителем 39, фиксирующим устройством 12 и дополнительным гидрораспределителем 32. Рабочая полость 48 соединяется- с рабочей полостью 45 через реверсивные гидрораспределители -39 и 40 и дополнительные гидрораспределители 32 и 33, в результате чего на протяжении некоторого отрезка пути саней 2 работают оба исполнительных гидроцилиндра 4 и 5. Если движение саней 2 продолжается в ту же сторону, то происходит повторение описанного цикла работы, при этом следует отметить, что включение реверса, по команде задающего устройства 24, возможно в любой точке пути саней 2. Наличие некоторого перекрытия в работе цилиндров, т.е. совместной их работы на некотором отрезке пути саней 2, исключает какие-либо динамические возбуждения в системе. При этом процессы нарастания и снижения усилия на щтоке 6 или 7, а также и соответствующей ему суммарной деформации в силовой цепи, происходят постепенно по мере подачи рабочей кидкостн в исполнительный гидроцилиндр и повыщейия в нем давления. Место зажима onofmita. направляющей значения не имеет. Однако при длительной работе саней 2 в средней части
станины 1 возможно постепенное накопление некоторого сдвига опор относительно номинальных мест их зажима на направляющих, поэтому предусмотрена установка на каждом конце направляющей 10 или И дополнительного путевого выключателя 25, восстанавливающего номинальное положение при первом подходе опоры к -краю направляющей 10 или П.
Работа гидравлической схемы двухщагового привода (см. фиг. 5) отличается от работы гидравлической схемы привода с неограниченным ходом лищь отсутствием ненужного здесь режима быстрого перегона.
Положительный эффект данного электрогидравлического приаода заключается в возможности получения плавности перемещения, быстродействия и демпфирования при перемещении подвижного угла, которые в совокупности с предельной простотой гидравлической схемы привода поз.воляют найти предлагаемому приводу широкое применение в тяжелом станкостроении.
Формула изобретения
Электрогидравлический следящий привод, содержащий задающее устройство, исполнительные гидроцилиндры, штоки которых соединены с продольно-подвижной опорой, фиксирующие устройства, реверсивные гидрораспределители, дросселирующий гидрораспределитель и узел обратной связи, отличающийся тем, что, с целью получения непрерывного с постоянной скоростью перемещения, независимо от динамической нагрузки, привод снабжен двумя дополнительными управляемыми от узла обратной связи гидрораспределителями с двумя входами и двумя выходами, причем одни из входов связаны с выходом дросселирующеготидрораспределителя, другие - между собой, а выходы их - с входами реверсивных гидрораспределителей.
Источники информации, принятые во внимание при экспертизе 1. Патент Великобритании № 1072479, кл. В 66 F 1/08. 1964.
«7 Л«
t2
i4«5 « « /
4-7
/
31
m
L..
4-5
L,
/
30
X
KZ
-/y
