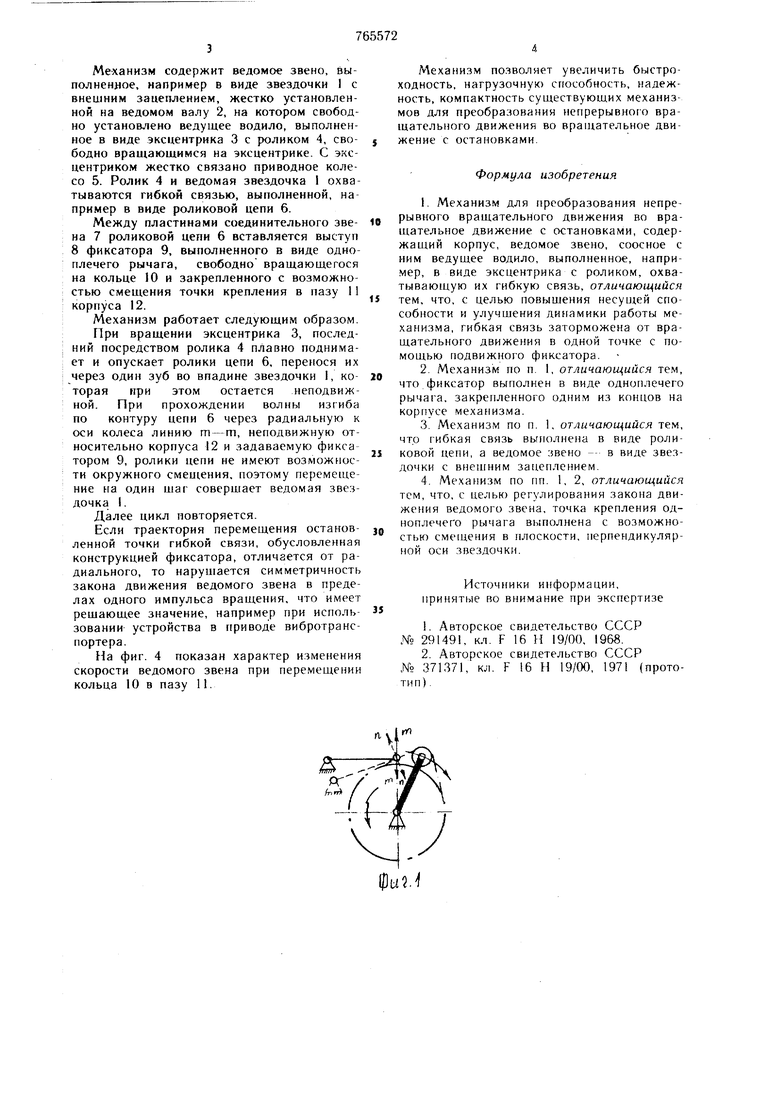
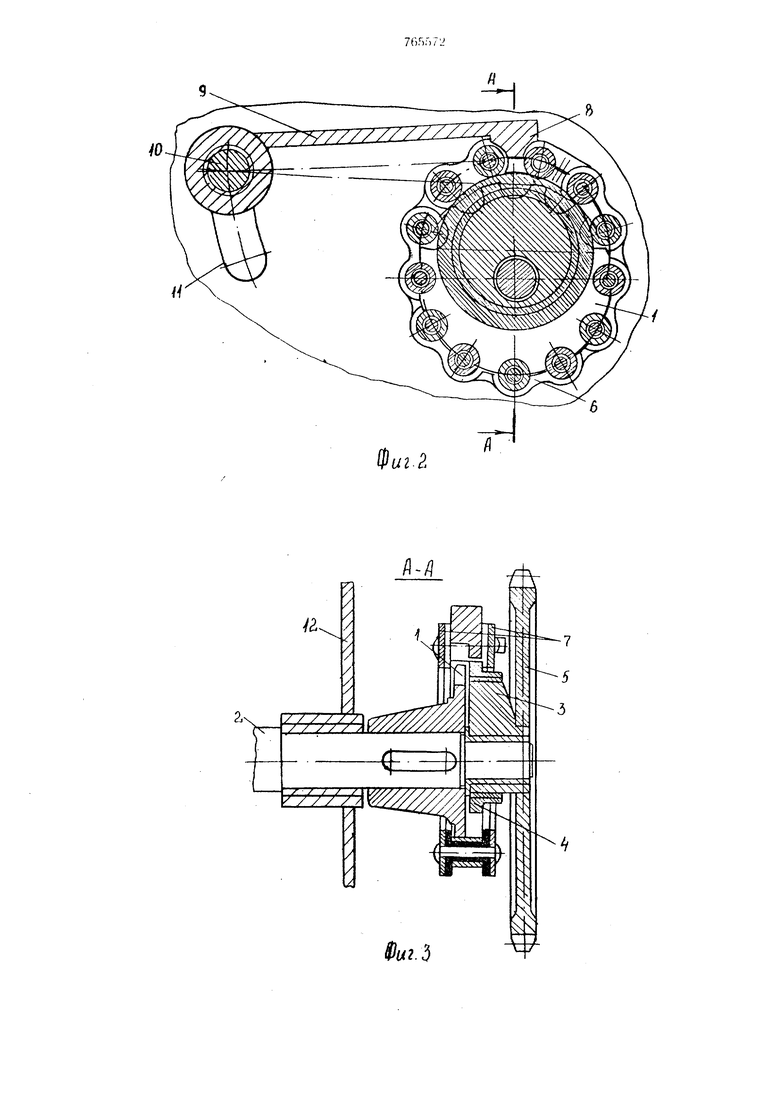
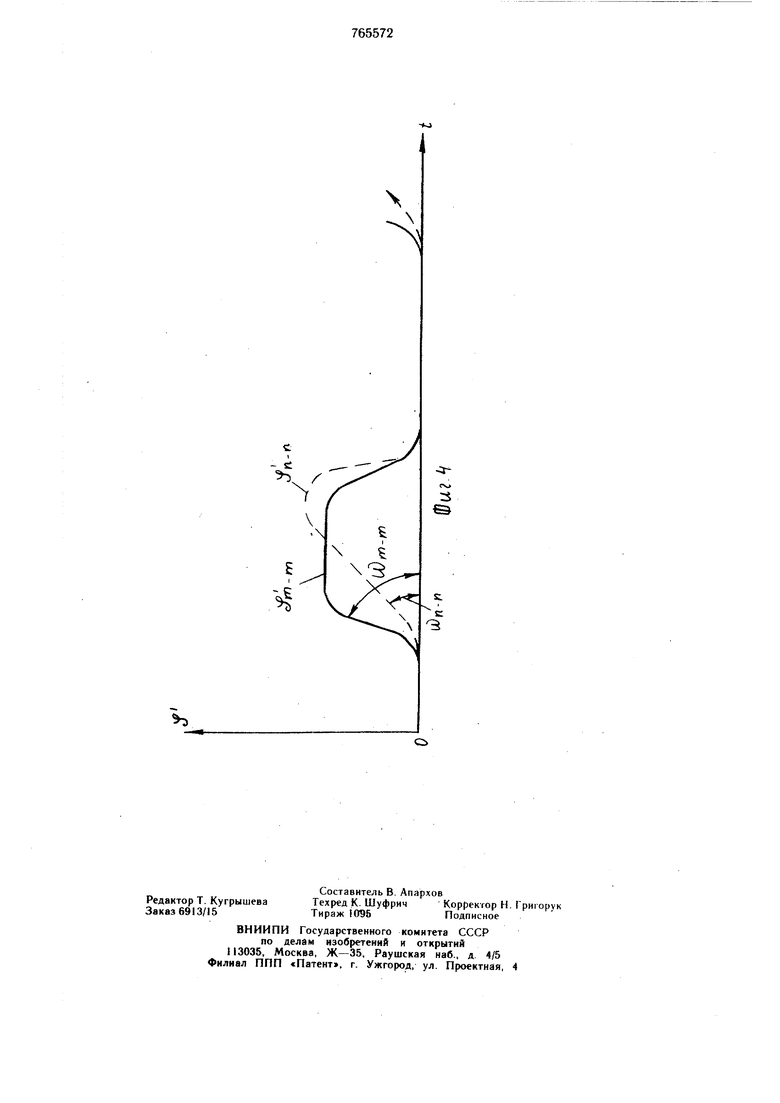
Механизм содержит ведомое звено, выполненлое. например в виде звездочки 1 с внешним зацеплением, жестко установленной на ведомом валу 2, на котором свободно установлено ведущее водило, выполненное в виде эксцентрика 3 с роликом 4, свободно вращающимся на эксцентрике. С эксцентриком жестко связано приводное колесо 5. Ролик 4 и ведомая звездочка I охватываются гибкой связью, выполненной, на пример в виде роликовой цепи 6. Между пластинами соединительного звена 7 роликовой цепи 6 вставляется выступ 8 фиксатора 9, выполненного в виде одноплечего рычага, свободно вращающегося на кольце 10 и закрепленного с возможностью смещения точки крепления в пазу 11 корпуса 12. Механизм работает следующим образом. При вращении эксцентрика 3, последний посредством ролика 4 пЛавно поднимает и опускает ролики цепи 6, перенося их через один зуб во впадине звездочки 1, которая при этом остается неподвижной. При прохождении волны изгиба по контуру цепи 6 через радиальную к оси колеса линию m-m, неподвижную относительно корпуса 12 и задаваемую фикса тором 9, ролики цепи не имеют возможности окружного смещения, поэтому перемещение на один таг совершает ведомая звездочка I. Далее цикл повторяется. Если траектория перемещения остановленной точки гибкой связи, обусловленная конструкцией фиксатора, отличается от радиального, то нарушается симметричность закона движения ведомого звена в пределах одного импульса вращения, что имеет рещающее значение, например при использовании устройства в приводе вибротранспортера. На фиг. 4 показан характер изменения скорости ведомого звена при перемещении кольца 10 в пазу 11. Механизм позволяет увеличить быстроходность, нагрузочную способность, надежность, компактность существующих механизмов для преобразования непрерывного вращательного движения во вращательное движение с остановками. Формула изобретения 1.Механизм для преобразования непрерывного вращательного движения во вращательное движение с остановками, содержащий корпус, ведомое звено, соосное с ним ведущее водило, выполненное, например, в виде эксцентрика с роликом, охватывающую их гибкую связь, отличающийся тем, что, с целью повышения несущей способности и улучшения динамики работы механизма, гибкая связь заторможена от вращательного движения в одной точке с помощью подвижного фиксатора. 2.Механизм по п. I, отличающийся тем, что фиксатор выполнен в виде одноплечего рычага, закрепленного одним из концов на корпусе механизма. 3.Механизм по п. 1, отминающийся тем, что гибкая связь выполнена в виде роликовой цепи, а ведомое звено -- в виде звездочки с внешним зацеплением. 4.Механизм по пп. 1, 2, отличающийся тем, что, с целью регулирования закона движения ведомого звена, точка крепления одноплечего рычага выполнена с возможностью сме дения в плоскости, перпендикулярной оси звездочки. Источники инфор.мации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 291491. кл. F 16 Н 19/00, 1968. 2.Авторское свидетельство СССР № 371371, кл. F 16 Н 19/00, 1971 (прототип).
гп
CNJ
3
с
