2.Механизм по п. 1, отличающийся тем, что гибкая связь выполнена в виде плоскою .1, концы которого разделбны на с1 р-чинва О1,циеся между собой полоски.
3.Механизм по п. 1, отличающийся тем, что гибкая связь выполнена в виде зубчатого ремкя или зубчатой цепи, а диски и кольцо - в виде звездочек.
4. Механизм по п. 1, отличающийся тем, что гибкая связь выполнена в виде трехполосного зубчатого ремня, средняя часть которого гладкая, а диски - в виде звездочек.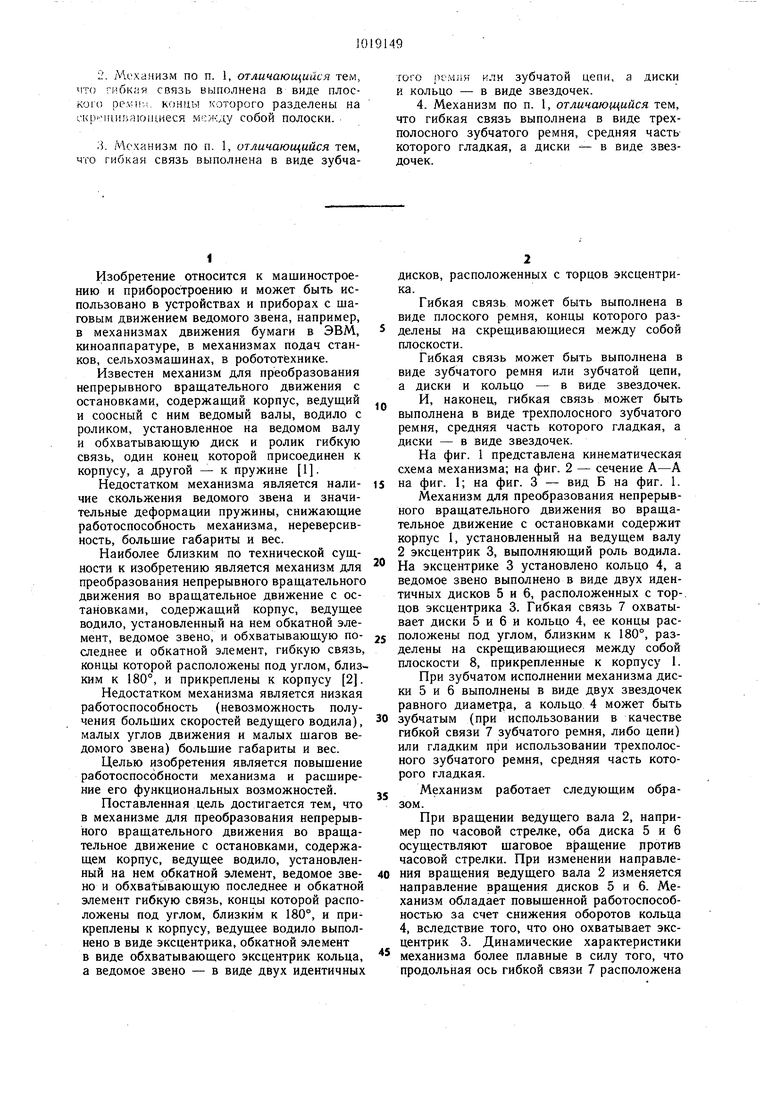
1. МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ НЕПРЕРЫВНОГО ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ С ОСТАНОВКАМИ, содержащий корпус, ведущее водило, установленный на нем обкатной элемент, ведомое звено и обхватывающую последнее и обкатной элемент гибкую связь, концы которой расположены под утлом, близким к 180°, и прикреплены к корпусу, отличающийся тем, что, с целью повышения работоспособности механизма и расщирения его функциональных возможностей, ведущее водило выполнено в виде эксцентрика, обкатной элемент - в виде обхватывающего эксцентрик кольца, а ведомое звено - в виде двух идентичных дисков, расположенных с торцов эксцентрика. (Л Х) 4 СО
Изобретение относится к машиностроению и приборостроению и может быть использовано в устройствах и приборах с шаговым движением ведомого звена, например, в механизмах движения бумаги в ЭВМ, киноаппаратуре, в механизмах подач станков, сельхозмашинах, в робототехнике. Известен механизм для преобразования непрерывного вращательного движения с остановками, содержащий корпус, ведущий и соосный с ним ведомый валы, водило с роликом, установленное на ведомом валу и обхватывающую диск и ролик гибкую связь, один конец которой присоединен к корпусу, а другой - к пружине 1. Недостатком механизма является наличие скольжения ведомого звена и значительные деформации пружины, снижающие работоспособность механизма, нереверсивность, большие габариты и вес. Наиболее близким по технической сущности к изобретению является механизм для преобразования непрерывного вращательного движения во вращательное движение с остановками, содержащий корпус, ведущее водило, установленный на нем обкатной элемент, ведомое звено, и обхватывающую последнее и обкатной элемент, гибкую связь, концы которой расположены под углом, близКИМ к 180°, и прикреплены к корпусу 2. Недостатком механизма является низкая работоспособность (невозможность получения больших скоростей ведущего водила), малых углов движения и малых шагов ведомого звена) большие габариты и вес. Целью изобретения является повышение работоспособности механизма и расширение его функциональных возможностей. Поставленная цель достигается тем, что в механизме для преобразования непрерывного вращательного движения во вращательное движение с остановками, содержащем корпус, ведущее водило, установленный на нем обкатной элемент, ведомое звено и обхватьшающую последнее и обкатной элемент гибкую связь, концы которой расположены под углом, близким к 180°, и прикреплены к корпусу, ведущее водило выполнено в виде эксцентрика, обкатной элемент в виде обхватывающего эксцентрик кольца, а ведомое звено - в виде двух идентичных ДИСКОВ, расположенных с торцов эксцентрика. Гибкая связь может быть выполнена в виде плоского ремня, концы которого разделены на скрещивающиеся между собой плоскости. Гибкая связь может быть выполнена в виде зубчатого ремня или зубчатой цепи, а диски и кольцо - в виде звездочек. И, наконец, гибкая связь может быть выполнена в виде трехполосного зубчатого ремня, средняя часть которого гладкая, а диски - в виде звездочек. На фиг. 1 представлена кинематическая схема механизма; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 1. Механизм для преобразования непрерывного вращательного движения во вращательное движение с остановками содержит корпус 1, установленный на ведущем валу 2 эксцентрик 3, выполняющий роль водила. На эксцентрике 3 установлено кольцо 4, а ведомое звено выполнено в виде двух идентичных дисков 5 и 6, расположенных с тор-, цов эксцентрика 3. Гибкая связь 7 охватывает диски 5 и 6 и кольцо 4, ее концы расположены под углом, близким к 180°, разделены на скрещивающиеся между собой плоскости 8, прикрепленные к корпусу 1. При зубчатом исполнении механизма диски 5 и б выполнены в виде двух звездочек равного диаметра, а кольцо 4 может быть зубчатым (при использовании в качестве гибкой связи 7 зубчатого ремня, либо цепи) или гладким при использовании трехполосного зубчатого ремня, средняя часть которого гладкая. Механизм работает следующим образом. При вращении ведущего вала 2, например по часовой стрелке, оба диска 5 и б осуществляют шаговое вращение проткв часовой стрелки. При изменении направления вращения ведущего вала 2 изменяется направление вращения дисков 5 и 6. Механизм обладает повышенной работоспособностью за счет снижения оборотов кольца 4, вследствие того, что оно охватывает эксцентрик 3. Динамические характеристики механизма более плавные в силу того, что продольная ось гибкой связи 7 расположена
в одной плоскости и во время работы механизма совершает плоское движение.
Технико-экономический эффект механизма обусловлен тем, что последний прост в изготовлении и не требует деталей высокой точности изготовления, Имеет малые габариты н вес за счет малой величины эксцентриситета эксцентрика 3, обеспечивает возможность получения малых углов движения.
.
ВидВ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ НЕПРЕРЫВНОГО | 0 |
|
SU371371A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Механизм для преобразованияНЕпРЕРыВНОгО ВРАщАТЕльНОгО дВижЕ-Ния BO ВРАщАТЕльНОЕ дВижЕНиЕ СОСТАНОВКАМи | 1979 |
|
SU813040A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
