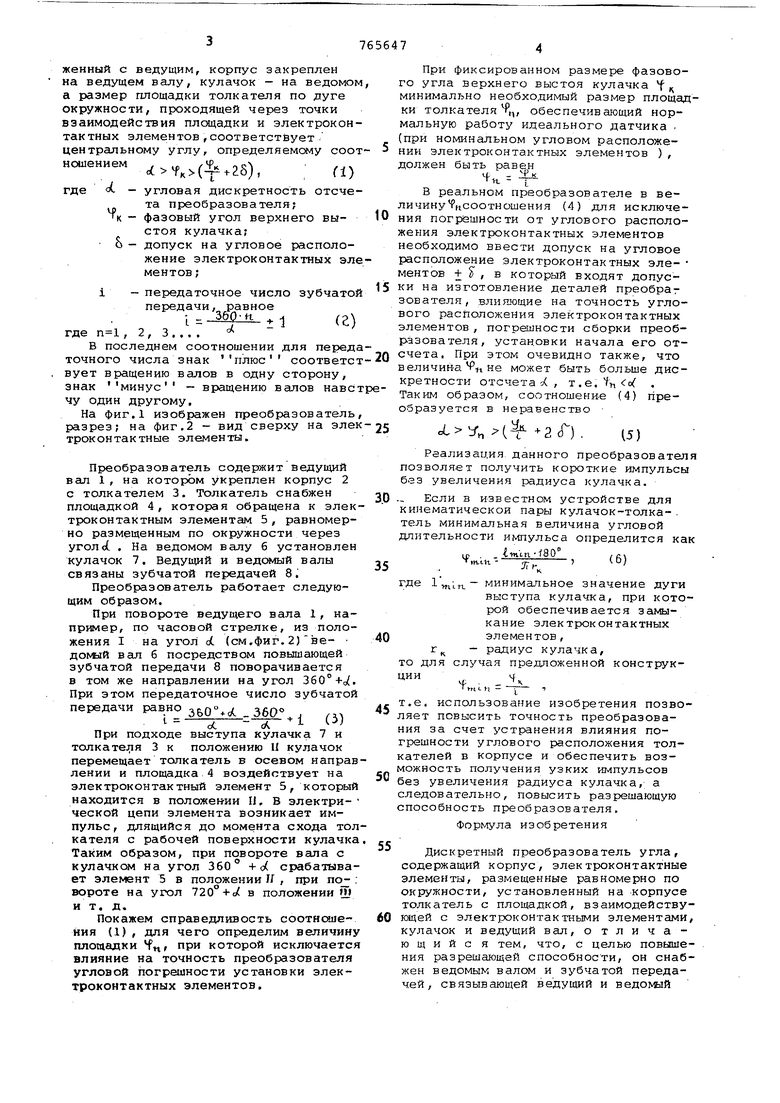
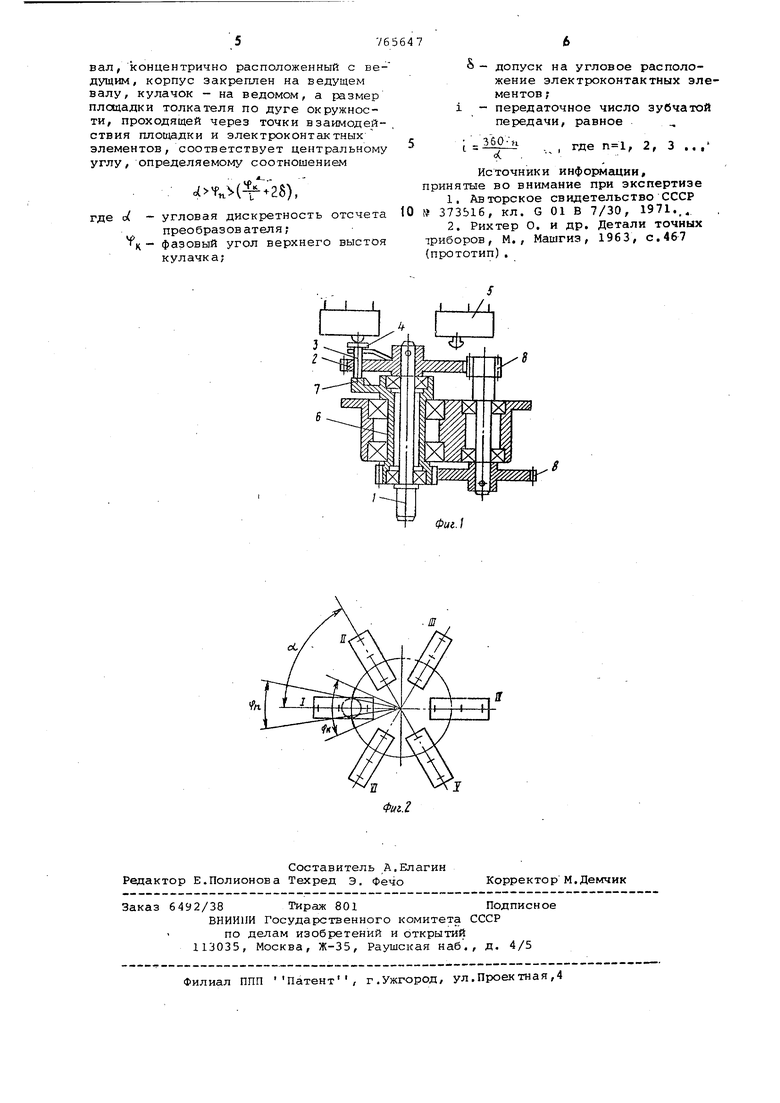
Изобретение относится к системам автоматического контроля и измерения и может быть использовано, в частности, для дискретного преобразования угла поворота в единичный импульсный код. Известны датчики для дискретного измерения угла поворота, содержащие корпус, электроконтактные элементы, размещенные по окружности, и вал, взаимодействующий с помощью постоянного магнита -с злектроконтактными элементами 1. Однако разброс параметров электро контактных элементов, а именно их времени срабатывания и отпускания, ведет к разбросу в амплитуде импульсо и временных интервалов между ними, что влияет на точность преобразо- : вателя. Наиболее близким по своей технической сущности и достигаемому резул тату к предлагаемому изобретению является дискретный преобразователь уг ла, содержащий корпус, электроконтак ные элементы, размещенные равномерно по окружности, установленный на корпусе толкате.пь с площадкойi взаимодействующей с электроконтактными эле ментами, кулачок и ведущий вал 2. Основными недостатками известного преобразователя являются влияние на точность измерения погрешностей ; г лового расположения толкателей в корпусе, которые неизбежны при изготовлении и сборке деталей, а также отсутствие возможности получения узких электрических импульсов с выхода преобразователя без пропорционального увеличения радиуса кулачка, что снижает его разрешающую способность. Последнее вызвано тем, что работоспособность кинематической пары кулачок-толкатель ограничена некоторой минимальной допустимой длиной дуги рабочей поверхности кулачка, следовательно, для получения коротких импульсов, необдимых для уменьшения шага дискретног преобразователя,надо увеличивать радиус кулачка,а заодно и габариты преобразователя в целом. 11елью изобретения является повышение разоешающей способности преобразователя . Это достигается тем, что преобразователь снабжен ведомым валом и зубчатой передачей, связывающей ведущий и ведомый вал, концентрично расположенный с ведущим, корпус закреплен на ведущем валу, кулачок - на ведомом а размер площадки толкателя по дуге окружности, проходящей через точки взаимодействия плсмцадки и электроконтактных элементов,соответствует центральному углу, определяемсму соот ношением ,(Ф. ,5),; П) где - угловая дискретность отсчета преобразователя; к - фазовый угол верхнего выстоя кулачка; S - допуск на угловое расположение электроконтактных эле ментов ; i -передаточное число зубчатой передачи, равное i,-jMiH. (г) где ,2,3.... В последнем соотношении для перед точного числа знак плюс соответс вует вращению валов в одну сторону, знак минус - вращению валов навс чу один другому. На фиг.1 изображен преобразователь разрез; на фиг.2 - вид сверху на зле троконтактные элементы. Преобразователь содержит ведущий вал 1, на котором укреплен корпус 2 с толкателем 3. Толкатель снабжен площадкой 4, которая обращена к элек троконтактным элементам 5, равномерно размещенным по окружности через уголоС . На ведомом валу 6 установлен кулачок 7. Ведущий и ведомый валы связаны зубчатой передачей 8. Преобразователь работает следующим образом. При повороте ведущего вала 1, например, по часовой стрелке, из положения I на угол оС (см.фиг. 2) ве- вал 6 посредством повышающей зубчатой передачи 8 поворачивается в том же направлении на угол 360°+d. При этом передаточное число зубчатой передачи равно зБО°. 360° (3) ot А При подходе выступа кулачка 7 и толкатеог1Я 3 к положению 11 кулачок перемещает толкатель в осевом направ лении и площадка 4 воздействует на электроконтактный элемент 5, который находится в положен-ии И, В электрической цепи элемента возникает импульс, длящийся до момента схода тол кателя с рабочей поверхности кулачка Таким образом, при повороте вгша с кулачке на угол 360° + о( срабатывает элемент 5 в положении Я , при nojj вороте на угол 720°+с/ в положении п и т. д. Покажем справедливость соотношения (1), для чего определим величину площадки Чпг при которой исключаетс влияние на точность преобразователя угловой погрешности установки электроконтактных элементов. При фиксированном размере фазового угла верхнего выстоя кулачка f минимально необходимый размер площадки толкателя i, обеспечивающий нормальную работу идеального датчика . (при номинальном угловом расположении электроконтактных элементов ), должен быть равен f - В реальном преобразователе в величину М соотношения (4) для исключения погрешности от углового расположения электроконтактных элементов необходимо ввести допуск на угловое расположение электроконтактных эле- ментов + , в который входят допуски на изготовление деталей преобраг зователя, влияющие на точность углового расположения электроконтактных элементов, погрешности сборки преобразователя, установки начала его отсчета. При этом очевидно также, что величина РП не может быть больше дискретности отсчета з( , т.е.о . Таким образом, соотношение (4) преобразуется в неравенство ().(5) Реализация, данного преобразователя позволя-ет получить короткие импульсы без увеличения радиуса кулачка. Если в известном устройстве для кинематической пары кулачок-толка-. тель минимальная величина угловой длительности импульса определится как Inin-iBQ - УГ7 где Iyfitf - минимальное значение дуги выступа кулачка, при которой обеспечивается замыкание электроконтактных элементов, г - радиус кулачка, то для случая предложенной конструкциит.е. использование изобретения позволяет повысить точность преобразования за счет устранения влияния погрешности углового расположения толкателей в корпусе и обеспечить возможность получения узких И1 1пульсов без увеличения радиуса кулачка, а следовательно, повысить разрешающую способность преобразователя. Формула изобретения Дискретный преобразователь угла, содержащий корпус, электроконтактные элементы, размещенные равномерно по окружности, установленный на корпусе толкатель с площадкой, взаимодействующей с электроконтактными элементами, кулачок и ведущий вал, о т л и ч а ю щ и и с я тем, что, с целью повышения разрешающей способности, он снабжен ведомым валом и зубчатой передачей, связывающей ведущий и ведомый
вал, концентрично расположенный с ведущим, корпус закреплен на ведущем валу, кулачок - на ведомом, а размер площадки толкателя по дуге окружности, проходящей через точки взаимодей-, ствия площадки и электроконтактных элементов, соответствует центральному углу, определяемому соотношением
п(),
0 - угловая дискретность отсчета преобразов ателя;
i - фазовый угол верхнего выстоя
к
кулачка;
допуск на угловое расположение электроконтактных элементов ;
передаточное число зубчатой передачи, равное
; - збо-п
где . 2, 3
« t
о(. .
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 10 № 373Ы6, кл. G 01 В 7/30, 1971.,.
2.Рихтер О. и др. Детали точных 1риборов, М., Машгиз, 1963, с.467 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| КОРРЕКЦИОННОЕ УСТРОЙСТВО | 1970 |
|
SU267278A1 |
| ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2012 |
|
RU2486390C1 |
| Передача с промежуточными звеньями | 1990 |
|
SU1772487A1 |
| Привод пульсирующего конвейера | 1984 |
|
SU1180316A2 |
| Передача с промежуточными звеньями | 1989 |
|
SU1716227A1 |
| СПОСОБ И МЕХАНИЗМ В.И. ПОЖБЕЛКО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВРАЩЕНИЯ С ОСТАНОВКАМИ | 2003 |
|
RU2249133C1 |
| Устройство для навивки пружин | 1979 |
|
SU820987A1 |
| Способ регулирования впрыска топлива в дизель и устройство для его осуществления (его варианты) | 1986 |
|
SU1512228A1 |
| РЕКЛАМНАЯ УСТАНОВКА | 2003 |
|
RU2262139C2 |
| ВАРИАТОР | 2018 |
|
RU2678179C1 |
oi
Ш
