(54) УСТРОЙСТВО ДЛЯ СОГЛАСОВАНИЯ УГЛОВОГО
ПОЛОЖЕНИЯ СИНХРОННО-ВРАЩАЮЩИХСЯ ВАЛОВ
ЭЛЕКТРОДВИГАТЕЛЕЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей | 1980 |
|
SU902189A1 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1983 |
|
SU1100700A1 |
| Устройство управления пьезоэлектрическим двигателем | 1978 |
|
SU765911A1 |
| Устройство для диагностики дизеля | 1980 |
|
SU877390A1 |
| Устройство для разметки магнитного барабана на равные интервалы | 1981 |
|
SU966727A1 |
| Способ изготовления эталона для проверки преобразователей угла поворота | 1973 |
|
SU578649A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2485665C1 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1989 |
|
SU1612368A1 |
| Способ контроля угловых качаний ротора синхронного электродвигателя и устройство для его осуществления | 1980 |
|
SU917084A1 |
| Устройство для автоматического фази-РОВАНия СиНХРОНизиРОВАННОгО элЕКТРО-пРиВОдА | 1978 |
|
SU817957A1 |
I
Изобретение относится к электротехнике и может быть использовано в установках, где требуется согласованное угловое положение синхронно-вращающихся валов, например в системах электрического поля, в установках видео- и звукозаписи.
Известны устройства синхронизации скорости вращения двигателей постоянного то.ка, в которых содержится генератор опорной частоты, импульсный датчик скорости1 фазовый детектор (ФД) и усилитель мощности (УМ). Сигнал опорного генератора (ОГ) и импульсного датчика скорости (ИДС) поступает на входы ФД, на выходах которого формируется напряжение, ггропорцнональное разности фаз сравниваемых сигналов, которое через усилитель мощности управляет скоростью вращения двигателя постоянного тока. Если от одного опорного генератора регулируется скорость нескольких двигателей, то обеспечивается синхронное вращение валов этих мащин. Одйако взйимное угловое положение валов может быть различным, так как от момента трогания до синхронизации каждый из двигателей проходит различный угловой путь 1.
Наиболее близким по технической сущности и достигаемому результату ,к предлагаемому является устройство для согласования углового положения синхронно-вращающихся валов электродвигателей, содержащее системы фазовой автоподстройки частоты вращения двигателей, одна из которых подключена к генератору опорной частоты, генератор вспомогательной частоты, триггеры и схемы совпадения 2.
Недостатком известного устройства является то, что процесс разгона не контролируется по углу и двигатели, разгоняясь до синхронной скорости, проходят различные пути, что приводит к различным угловым положениям валов синхронизируемых двигателей.
Цель изобретения -увеличение точности и быстродействия согласования углового положения синхронно-вращающихся валов электродвигателей.
Поставленная цель достигается тем, что в известное устройство введены второй генератор вспомогательной частоты, управляемые ключи, инвертор, датчики углового положения, установленные на выходных
валах электродвигателей, и одновибраторы, входы которых соединены с выходами датчиков углового положения валов и с входами первой схемы совпадения, причем вход одного из одновибраторов через инвертор соединен с первым входом второй схемы сов,падения, а выход другого одновибратора подключен ко второму входу второй схемы совпадения и к первому входу третьей схемы совпадения, второй вход которой соединен с выходом одновибратора, выход .первой схемы совпадения подключен ко входу установки «единицы первого триггера, соединенногч) с первым управляемым клю чом, выход третьей схемы совпадения подключен ко входу установки «единицы второго триггера, соединенного со вторым управляемым ключом; выход второй схемы совпадения подключен ко входам установки нуля указанных триггеров, а второй генератор вспомо|-ательной частоты через управляемые ключи подключен на вход системы фазовой автоподстройкп частоты вращения второго двигателя, причем второй вход второго управляемого ключа соединен с выходом генератора опорной частоты.
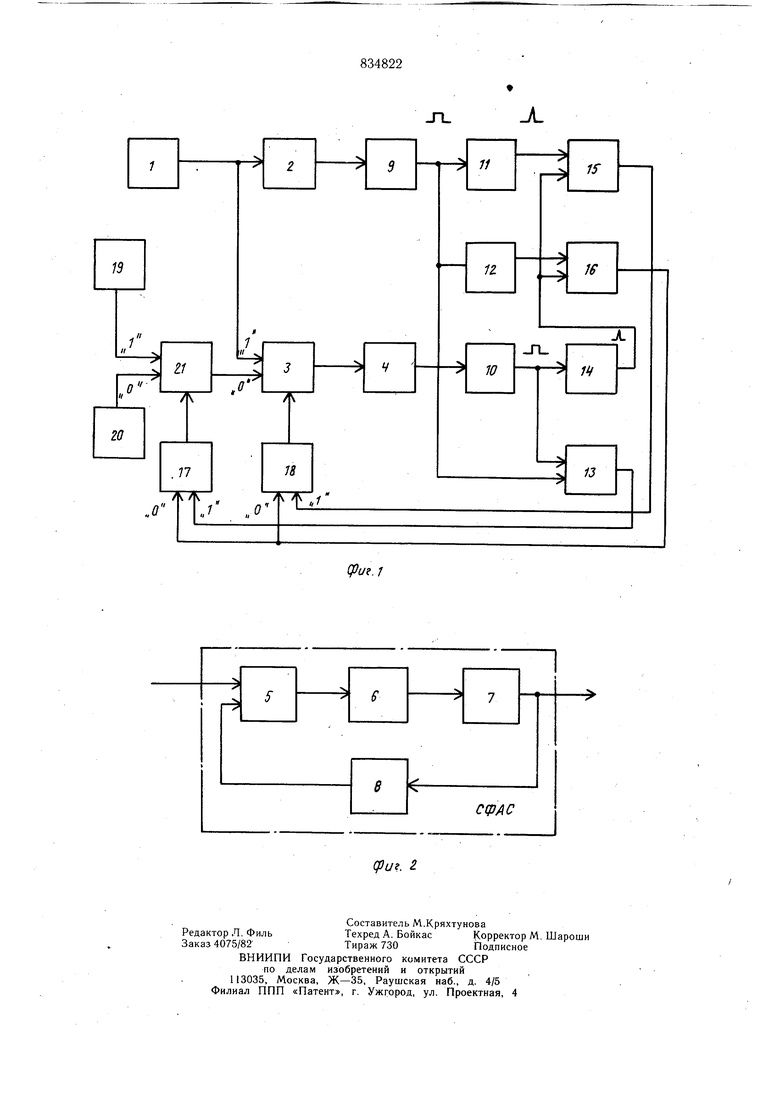
На фиг. 1 и 2 представлена блок-схема устройства
Устройство содержит генератор опорной частоты 1, выход которого соединен с входом системы фазовой автоподстройки 2 скорости первого двигателя и через управляемый ключ 3 - с входом системы фазовой автоподстройки 4 скорости второго двигателя. Каждая из систем фазовой автоподстройки имеет стандартную структуру (фиг. 2) и состоит из фазового детектора 5, усилителя 6 мощности, двигателя постоянного тока 7, на валу которого размещен импульсный датчик 8 скорости, и обеспечивает регулирование скорости двигателя по разности фаз между сигналами опорного генератора и импульсного датчика скорости. Импульсные датчики скорости обоих приводов имеют дополнительные преобразователи 9 и ,10 углового положения валов, которые формируют одиночные импульсы за каждый оборот вала двигателей. Выход преобразователя 9 угла соединен с входом одновИбратора 11, с входом ячейки НЕ 12 и с одним из входов ячейки И 13. Выход преобразователя 10 угла соединен с входом одновибратора 14 и со вторым входом ячейки И 13. Выход одновибратора 11 подключен на первый вход ячейки И 15, а выход одновибратора 14 соединен со вторым входом ячейки И 15, с первым входом ячейки И 16, второй вход которой подключен к выходу ячейки НЕ 12. Выход ячейки И 13 соединен с входом установки Ч триггера 17, а выход ячейки И 15 соединен с входом установки « триггера 18. Входы установки «О триггеров 17 и 18 подключены к выходу ячейки И 16. Выходы вспомогательных генераторов 19 и 20 подключены на входы управляемого ключа 21, выход которого соединен с входом управляемого ключа 3. Выход триггера 17 подключен на управляющий вход ключа 21, а выход триггера 18 - на управляюший вход ключа 3.
Устройство работает следующим образом.
При включении приводов подается питание на блоки системы управления и осуществляется установка .триггеров в положение «О. Поэтому на вход системы фазовой автоподстройки 2 поступает сигнал с выхода опорного генератора 1, а на вход системы фазовой автоподстройки 4 - сигнал с выхода вспомогательного генератора
20, так как при нулевом положении триггеров 17 и 18 через управляемые ключи 21 и 3 проходит только сигнал первого входа. Частоты генераторов 1 и 20 устанавливаются с некоторой разницей и после синхронизации приводов по каждому из каналов имеет место взаимное угловое перемещение валов электродвигателей. Скорость перемещения зависит от разницы частот генераторов 1 и 20 и может быть установлена достаточно больщой. Последнее обстоятельство ускоряет процесс предварительного согласования углового положения валов электродвигателей. Это состояние схемы продолжается до тех пор, пока не совпадут во времени импульсы преобразователей 9 и 10 и на выходе ячейки И 13 не появится
сигнал. При этом, чтобы процесс согласования по углу заверщился на одном периоде сближения импульсов, необходимо щирину щели преобразователей 9 и 10 выбирать из условия
(о-Т, (/)
где л - щирина щели преииразователей
9 и 10;
л cOi - разницы между скоростью первого и второго двигателя;
-период вращения двигателя, скорость которого наибольщая. Если условие (1) ,не выполняется, то процесс синхронизации проходит в течение нескольких периодов до тех пор, пока импульсы на вы коде преобразователей 9 и 10 не совпадут во времени.
В предла1 аемом устройстве да выбирается достаточно больщим и предварительное согласование проходит за .минимальное время Появление импульса на выходе ячейки И 13 приводит к опрокидыванию триггера 17 в положение «1 и ключ 21 переводит систему фазовой автоподстройки 4 скорости на управление от вспомогательного генератора 19, близкого по частоте к опорному reijepaTopy 1. После синхронизации второго двигателя начинается медленное сближение передних фронтов импульсов преобразователей 9 и 10, на выходе одновибраторов 11 и 14 формируются импульсы согласования малой длительносчи. При одновременном появлении импульсов .согласования на входах ячейки И 15 на ее выходе появляется сигнал, который опрокидывает триггер 18 в положение «1 и ключ 3 переводов систему фазовой автоподстройки 4 скорости на управление от опорного генератора 1. После синхронизации двигатели в обоих системах вращаются синхронно и синфазно с угловым рассогласованием, не превышающем одной дискреты импульсного датчика скорости. В случае выхода любой системы электропривода из синхронизма и нарушения углового положения импульсы на выходе ячейки НЕ 12 совпадут во времени с импульсами одновибратора 14 и на выходе ячейки И 16 появится сигнал, который переведет триггера 17 и 18 в нулевое состояние, и вся схема вернется в исходное состояние и процесс повторяется. Предлагаемое устройство позволяет прлучить минимальное время согласования, 20 так как основной процесс согласования проходит с достаточно больщой скоростью сближения и только при угле рассогласования имеет место медленное сближение валов, определяемое разностью частот генераторов 1 и 19. Допустимая разница скоростей двигателей не может в этом случае превышать величины л . , лад-z-T где7 - число щтрихов импульсного датчика скорости. Таким образом, в предлагаемом устройстве обеспечивается высокая точность углового согласования валов при минимально возможном времени согласования. С увеличением числа штрихов импульсного датчика скорости будет увеличиваться точность синхронизации, одновременно с этим необходимо изменять частоту генератора 19, приближая ее к частоте опорного генератора 1. Формула изобретен Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей, содержащее системы фазовой автоподстройки частоты вращения двигателей, одна из которых подключена к генератору, опорной частоть, триггеры и схемы совпадения, отличающееся тем, что, с целью увеличения точности и быстродействия, в него введены второй генератор вспомогательной частоты, управляемые ключи, инвертор, датчики углового положения, установленные на выходных валах электродвигателей и одновибраторы, входы которых соединены с выходами датчиков углового положения валов и с входами первой схемы совпадения, причем вход одного из одновибраторов через инвертор соединен с первым входом второй схемы совпадения, а выход другого одновибратора подключен ко второму входу второй схемы совпадения первому входу третьей схемы совпадения, второй вход которой соединен с выходом одновибратора, выход первой схемы совпадения подключен ко входу установки «единицы первого триггера, соединенного с первым управляемым ключом, выход третьей схемы совпадения подключен ко входу установки «единицы второго триггера, соединенного со вторым управляемым ключом, выход второй схемы совпадения подключен ко входам установки «нуля указанных триггеров, а второй генератор вспомогательной частоты через управляемые ключи подключен на вход системы фазовой автоподстройки частоты вращения второго двигателя, причем второй вход второго управляемого ключа соединен с выходом генератора опорной частоты. Источники информации, принятые во внимание при экспертизе 1.Патент США №3351831, кл. 318-77, 1971. 2.Авторское свидетельство СССР №467440, кл. Н05 Р 5/06, 1970.
JL
П
