частоты вращения двигателя, регулятор момента нагрузки в упругой механической связи и регулятор момента двигателя и подключенный ко входу соответствующего регулятора датчик момента нагрузки, снабжено двумя элементами сравнения, нелинейным элементом с параболической характеристикой, пропорционсшьным звеном с регулируемым передаточным коэффициентом, блоком выделения модуля, причем два входа первого элемента сравнения подключены к выходам регулятора частоты вращения и датчика момента нагрузки, а его выход через нелинейный элемент с параболической характеристикой подключен ко входу регулятора момента нагрузки в упругой механической, связи-электропривода, два входа второго элеме;нта сравнения подключены к выходам регулятора момента нагрузки в упругой механической связи электропривода и датчика момента двигателя, а его выход подключен ко входу регулятора момента двигателя -через пропорциональное звено с регулируемым передаточным коэффициентом, вход регулирования передаточного коэффициента которого соединен через блок выделения модуля с выходом первого элемента сранения, кроме того, датчик момента нагрузки в упругой механической связи электропривода выполнен в виде операционного усилителя с Т-образным RC-фильтром в цепи его обратной связи, первого суммирующего усилителя с тремя входами и блоком ограничения в цепи его обратной связи к второго суммирующего усилителя с четырьмя входами, причем три входа первого суммирующего усилителя подключены соответственно к выходам датчика частоты вращения двигателя, датчика момента двигателя и второго суммируюдего усилителя, четьфе входа которого подключны к выходам первого суммирующего усилителя, датчика момента двигателя, датчика частоты вращения двигателя и операционного усилителя с Т-образным RC-фильтром в цепи его обратной связи, вход которого соединен с выходом датчика частоты вращения двигателя.
Достижение указанного эффекта обеспечивается также выполнением пропорционального эвена с регулируемым передаточным коэффициентом в виде управляемого резистора, выполненного по структуре металл-диэлектрик-полупроводник, и трех линейных резисторов, причем сток и исток управляемого резистора и два соединенных последовательно линейных резистора включены между входом и выходом пропорционального звна с регулируемым передаточным коэффициентом, вход регулирования передйточного коэффициента которого подключен между затвором управляемого резистора и общей точкой двух указанных линейных резисторов, которая через третий линейный резистор соединена с подложкой управляемого резистора.
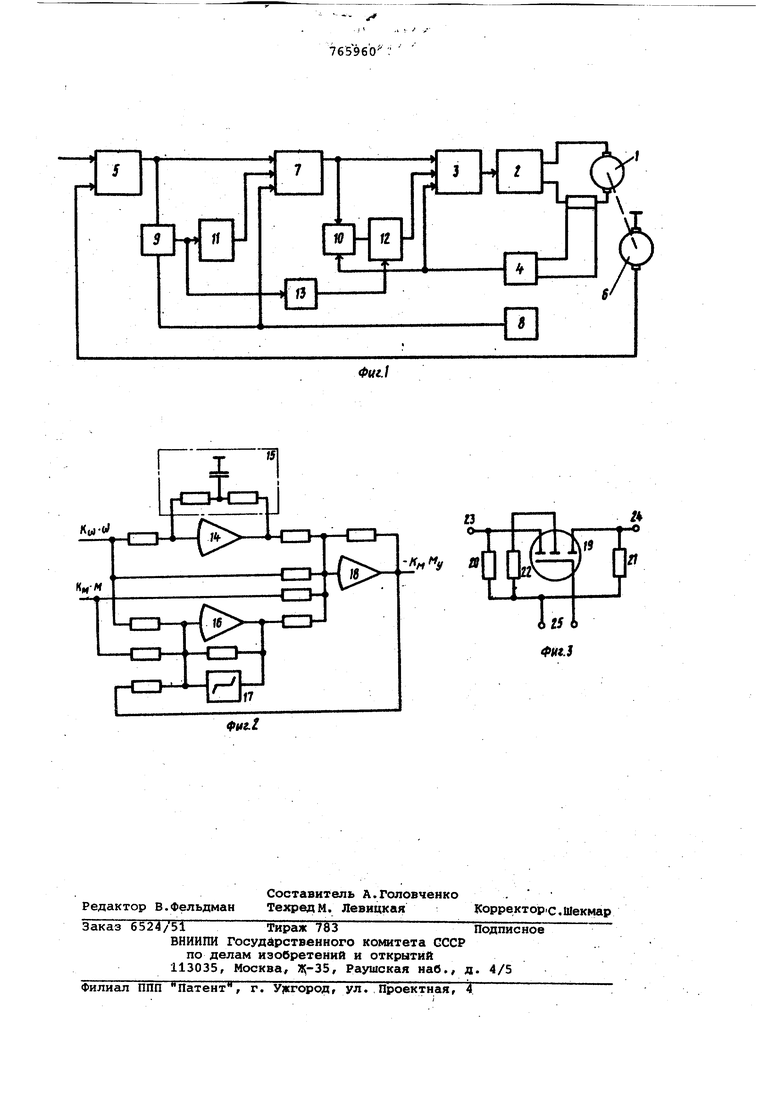
На фиг. 1 приведена структурная схема устройства для регулирования момента нагрузки в упругой механической связи электропривода; на фиг. 2 - схема датчика момента нагрузки в упругой механической связи электропривода; на фиг. 3 - схема пропорционального звена с регулируемым передаточным коэффициентом.
Двигатель 1 питается от преобразователя 2, вход которого соединен с выходом регулятора 3 момента двигателя, ко входу которого подключен датчик 4 момента двигателя, а вход регулятора 5 частоты вращения двигателя соединен с выходом датчика 6,частоты вращения двигателя.
Устройство для регулирования момента нагрузки в упругой механической связи электропривода содержит включенный между выходом регулятора 5 частоты вращения двигателя и входом регулятора 3 момента двигателя регулятор 7 момента нагрузки в упругой механической связи с подключенным к его входу датчиком 8 момента нагрузк, два элемента сравнения 9 и 10, нелинейный элемент 11 с параболической характеристикой, пропорциональное звено 12 с регулируе1и&1М передаточным коэффициентом, блок выделения модуля 13, причем два входа первого элемента сравнения 9 подключены к выходам регулятора частоты вращения 5 и датчика момен та нагрузки 8, а его выход через нелинейный элемент 11 с параболической характеристикой подключен ко входу регулятора 7 момента нагрузки в упругой механической связи электропривода, два входа второго элемента сравнения 10 подключены к Выходам регулятора 7 момента нагрузки в упругой механической связи электропривода датчика 4 момента двигателя, а его выход подключен ко входу регулятора 3 метлента двигателя через пропорциональное звено 12 с регулируемым.передаточным коэффициенте, вход регулирования передаточного коэффициента которого соединен через блок выделения модуля 13 с выходом первого элемента сравнения 9.
Датчик 8 мсмента нагрузки в упругой механической связи электропривода (см. фиг. 2) выполнен в виде операционного усилителя 14 с Т-образным RC-фильтром 15 в цепи его обратной связи, первого суьфшрующегь усилителя 16 с тремя входами я бло-
КОМ ограничения 17 в цепи его обратной связи и второго суммирукнцего усилителя 18 с четырьмя входами причем три входа первого суммирующего усилителя 16 поключены к выходам датчика б частоты вращения двигателя U), датчика 4 момента двителя Мд и второго суммирующего усилителя 18, четыре входа которого подключены к выходам первого суммирующего усилителя 16, датчика 4 момента двигателя МД, датчика б частоты вращения двигателя Ш и операционного усилителя 14 с Т-образным RC-фильтром в цепи его обратной связи, вход которого соединен с- выходом датчика б частоты вращения двигателя.
Пропорциональное звено 12 с регулируемым передаточным коэффициентом (см. фиг. 3) выполнено в виде управляемого ВДП резистора 19 (со структурой металл-диэлектрикполупроводник) и трех линейных резисторов 20, 21 и 22, причем сток и исток МДП резистора 19 и два соединенных последовательно линейных резистора 20 и 21 включены меяоду входом 23 и выходом 24 пропорционального звена 12 с регулируемым передаточным коэффициентом, вход 25 регулирования передаточного коэффициента которого подключен межicty затвором МДП резистора 19 и общей точкой двух указанных линейных резисторов 20 и 21, которая через третий линейный резистор 22 соединена с подложкой МДП резистора 19.
Устройство работает следующим образом.
С помощью первого элемента сравнения 9 осуществляется сравнение фактического и заданного значений момента нагрузки в упругой механической связи.электропривода, характеризуемых сигналами с выходов датчика 8 нагрузки и регулятора 5 частоты вращения двигателя соответственно. При наличии рассогласования момента нагрузки My выходной сигнал первого элемента сравнения 9 через нелинейный элемент 11 с параболической характеристикой поступает на вход регулятора 7 момента нагрузки, складывается с основным задающим сигналом, поступающим с выхода регулятора 5 частоты вращения двигателя, и тем Сс1мым обеспечивает более быстрое уменьшение рассогласуэвания момента, что способствует повышению динамической точности регулирования этого момен та нагрузки. Благодаря параболической характеристике нелинейного элемента 11 поступающий с его выхода на вход регулятора 7 момента нагрузки дополнительный сигнал растет быстрее/ чем увеличивается рассогласование момента нагрузки,, что
повышает скорость уменьшения ошибки регулирования и благодаря чему также.повышается динамическая точность регулирования.
Одновременно сигнал с выхода первого элемента сравнения 9 поступает на вход регулирования передаточного коэффициента пропорционального звена 12. Чем больше величина рассогласования момента нагрузки, т.е. чем больше выходной сигнал первого
0 элемента сравнения 9, тем больше передаточный коэффициент пропорционального звена 12. Выходной сигнал второго элемента сравнения 10, пропорциональный разности заданно5го (с выхода регулятора 7 момента нагрузки) и фактического (с выхода датчика 4 момента двигателя) момента двигателя, поступает через пропорциональное звено 12 на вход регу0лятора 3 момента двигателя. Этот дополнительный сигнал добавляется к основному задающему сигналу с выхода регулятора 7 момента нагрузки и обеспечивает быстрое уменьшение ошибки регулирования, что повышает
5 динамическую точность регулирования момента нагрузки. Особенно существенно влияние дополнительного сигнала на входе регулятора 3 момента двигателя в режиме, при кото0ром регулятор 7 момента нагрузки находится в зоне насыщения.
По мере уменьшения рассогласования момента нагрузки уменьшается выходной сигнал первого элемента
5 сравнения 9, вместе с ним уменьшается дополнительный сигнал, поступающий на вход регулятора 7 момента нагрузки через нелинейный элемент 11 с параболической характери0стикой. Одновременно приближается к нулю передаточный коэффициент npoifopционального эвена 12, вследствие , чего уменьшается дополнительный сигнал, поступающий на вход регулятора 3 момента двигателя.
5
При нулевом рассогласовании момента нагрузки, т.е. при нулевой ошибке регулирования этого момента нагрузки, оба дополнительных сигнала равны нулю.
0
Благодаря параболической характеристике нелинейного элемента 11 его коэффициент усиления в зоне малых рассогласований момента нагрузки близок к нулю, вследствие чего
5 близок к нулю и дополнительный сигнал, поступающий на регулятор момента нагрузки, который при этом практически не изменяется в указанной зоне, что способствует плавной отработке малых ошибок регулирова0ния момента нагрузки.
Указанное построение устройства для регулирования момента нагрузки в упругой механической связи электропривода обеспечивает быстрое
уменьшение -сяаибке регулирования, а при появлении сааибки вследствие управляющего или возмущающего воздействий на электропривод эффективное ограничение и снижение максимальных ошибок во время переходного процесса, т.е. обеспечивается повьпиение динамической точности регулирования момента нагрузки.
В датчике 8 момента нагрузки в упругой механической связи электропривода сигнал на выходе второго суммирующего усилителя 18 определяется зависимостью
.
К,, (к,, К
момент трения на валу двигателя ;
масштабные коэффициенты, коэффициент усиления и
время упреждения операционного усилителя 14 с Тобразным RC-фильтром 15 в цепи его обратной связи где М - максимальная величина i-ю ° мента трения. При нулевой скорости двигателя сигнал на первом входе первого суммирующего усилителя 16 равен нулю, а сигналы, поступающие на его второ и третий входы с выходов датчика 4 момента двигателя и второго суммирующего усилителя 18, формируют на его выходе сигнал, определяемый пер вой или второй строчками указанной зависимости, при этом блок ограниче ния 17 обеспечивает ограничение вых ного сигнала первого суммирующего усилителя 16 значением, соответствующим максимальной величине момента трения. При .нулевоТ скорости двигателя выходной сигнал датчика 6 скорости двигателя поступает на первый вход первого суммирующего усилителя 16, коэффициент усиления по которому выбирается на порядок большим, чем по второму и третьему входам, благодаря чему выходной си нал первого суммируквдего усилителя 16 будет достигать максимального значения, определяемого блоком ограничения 17 в соответствии с выражением, приведенным в третьей строчке указанной выше зависимости Описанное выполнение датчика 8 момента, нагрузки в упругой механической связи электропривода обеспеК, Kj/ - коэффициенты усиления втоК, К, рого операционного усилителя 18 по Первому - четвертому входам соответственно.
5 При выборе параметров схемы в соответствии с условиями
. SSK,,T,,,
где - момент инерции двигателя, выходное напряжение второго опера 0 ционного усилителя 18 пропорционально моменту нагрузки в упругой меха нической связи электропривода
аи;
ВЫх18 м - лл( аГ/
Подаваемые на три вхрца первого операционного усилителя 16 сигналы с выходов датчика частоты вращения 6 () датчика 4 момента двигателя (К/уу- Мд) и второго суммирующего усилителя 18 ( Н,,у) обеспечивают формирование на его выходе сигнала, пропорционального моменту трения на валу двигателя в соответстВИИ с зависимостью
При --о) |(-M,,NNA k,,) t-ip-a u;-o-, fv. , нрП4, ш to чивает высокую точ определения этого момента, что способствует повышению точности его регулирования. Входной сигнал, пропорционального звена 12 с регулируемым передаточным коэффициентом поступает на его вход 23 (см. фиг. 3) и проходит на его выход 24 через сопротивление между стоком и истоком управляемого МДП резистора 19. Напряжение, подаваемое со входа 25 регулирования передаточного коэффициента пропорционального звена 12 на затвор МДП резистора 19, создает электрическое поле, изменение которого изменяет сопротивление между стоком и истоком МДП резистора 19 и тем самым обеспечивает регулирование передаточного коэффициента пропорционального звена 12. Линейные резисторы 20 и 21 обеспечивают линеаризацию и симметричность характеристики пропорционального звена 12, а линейный резистор 22 расширяют диапазон регулирования и уменьшает чувствительность этого звена к внешним помехам, делая определенным потенциал подложки МДП резистора. Возможность плавного регулирования передаточного коэффициента пропордионального .-звена 12 в широких пределах обеспечивает при такой реализации этого звена эффективное возействие на систему управления электроприводом в соответствии с описанным выше принципом работы предоженного устройства, что способствует повышению динамической точносги регулирования момента нагрузки.
Таким образом, предлагаемое устройство обеспечивает повышение динамической точности регулирования момента нагрузки в упругой механической связи электропривода, что позволяет также уменьшить максимальные значения этих нагрузок и тем самым повысить надежность электромеханической системы электропривода, а также сократить время переходных процессов и тем самым повысить быстродействие электропривода. Предлагаемое устройство может применяться в электроприводах прокатных станов, блюмингов, бумагоделательных машин, экскаваторов, шахтных подъемников, драг, станков.
Формула изобретения
1. Устройство для регулирования момента нагрузки в упругой механической связи электропривода, содерл ащее последовательно включенные регулятор частоты вращения, регулятор момента нагрузки в упругой механической связи и регулятор момента двигателя и подключенный ко входу соответствующего регулятора датчик момента нагрузки, отличающееся тем, что, с целью повышения динамической точности регулирования момента нагрузки, в него введены два элемента сравнения, нелинейный элемент с параболической характеристикой, пропорциональное звено о регулируемым передаточным коэффициентом, блок выделения модуля , причем два входа первого элемента сравнения подключены к выходам регулятора частоты вращения и датчика момента нагрузки, а его выход через нелинейный элемент с параболической характеристикой подключен ко входу регулятора момента нагрузки в упругой механической связи электропривода, два входа второго элемента сравнения подключены к выходам регулятора момента нагруки в упругой механической связи электропривода и датчик момента двгателя, а его выход подключен ко входу регулятора момента двигателя через пропорциональное звено с регулируемым передаточным коэффициентом, вход регулирования передаточного коэффициента которого соединен через блок выделения модуля с выходом первого элемента сравнения.
2.Устройство по п. 1, отличающееся тем, что датчик момента нагрузки выполнен в виде операционного усилителя с.Т-образным RC-фильтром в цепи его обратной связи, первого суммирующего уси0лителя с тремя входами и блоком ограничения в цепи его обратной связи и второго суммирующего усилителя с четырьмя входами, вЬгход которого является выходом датчика, причем
5 три входа первого суммирующего усилителя подключены соответственно к выходам датчика частоты вращения двигателя, датчика момента двигателя и второго суммирующего усилителя,
0 четыре входа которого подключены
к выходам первого суммирующего усилителя, датчика момента двигателя, датчика частоты вращения двигателя и операционного усилителя с Тобразным RC-фильтром в цепи его
5 обратной связи, вход которого соединен с выходом датчика частоты вращения двигателя.
3.Устройство по п. 1, отличающееся тем, что пропор0циональное звено с регулируемым передаточным коэффициентом выполнено в виде управляемого резистора, выполненного по структуре металлдиэлектрик-полупроводник, и трех
5 линейных резисторов, причем сток
и исток управляемого резистора и два последовательно соединенных линейных резистора включены междувходом и выходом пропорционального
0 звена с регулируемым передаточным коэффициентом, вход регулирования передаточного коэффициента которого подключен между затвором управляемого резистора и общей точкой двух указанных линейных резисторов,
5 которая через третий линейный резистор соединена с подложкой управляемого резистора.
Источники информации, принятые во внимание, при экспертизе
0
1.Труды Московского энергетического института. Вып. 302, 1976,
с. 32-36, рис. 1.
2.Системы регулирования автоматизированных электроприводов с упру5гими звеньями механической части (аналитический обзор). Серия ТС-8, Электропривод. Комплектные устройства. Обзорная информация. М., ИнФормэлектро, 1977, с. 20, рис.10.
765960 


| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| Электропривод | 1986 |
|
SU1372580A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С УПРУГИМИ СВЯЗЯМИ | 2012 |
|
RU2513871C1 |
| Электропривод постоянного тока | 1983 |
|
SU1145438A1 |
| Многодвигательный электропривод | 1985 |
|
SU1410264A1 |
| Электропривод постоянного тока | 1978 |
|
SU744883A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ С ФРИКЦИОННОЙ НАГРУЗКОЙ | 1992 |
|
RU2079961C1 |
| ЭЛЕКТРОПРИВОД С АДАПТИВНЫМ РЕГУЛИРОВАНИЕМ ТОКА | 1993 |
|
RU2095930C1 |
| АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2544483C1 |
о --у 1. I О
niit± О
17
ФМ.1
