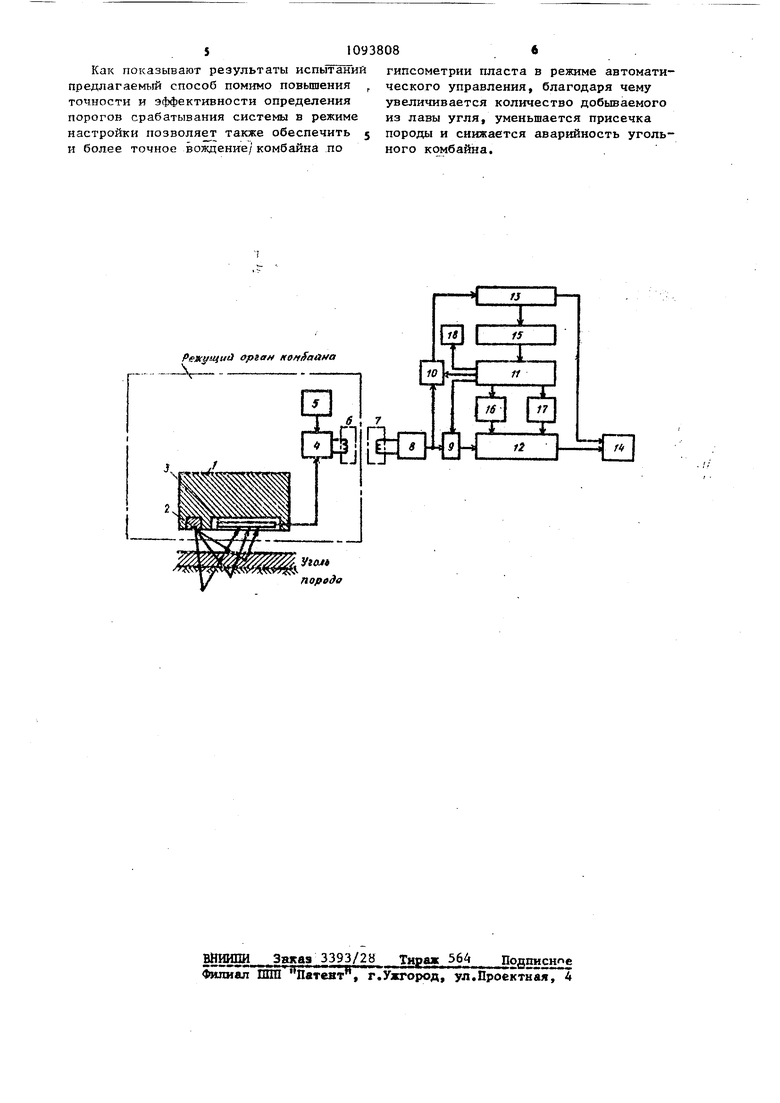
Изобретение относится к горному делу, в частности к области автомати зации горных машин, и может быть использовано при разработке угледобывающих комплексов для безлюдной выем ки угля. Настройка системы автоматического управления угольным комбайном в проф ле пласта по сигналам датчика поро да-уголь заключается в установлении определенных значений порогов срабат вания системы, соответствующих задан ной толщине оставляемой при выемке пласта угольной пачки. Известен способ определения порогов срабатьшания.системы автоматического управления угольным комбайном в профиле пласта по сигналам датчика порода-уголь, реализованный в системе автоматического управления исполнительными органами комбайна с элект рогидравлическим датчиком породауголь ij . По этому способу установление определенного значения порога срабатывания системы производится с помощью регулирования подпорного клапана., создаюп{его определенное давление в гидросистеме. Такая настройка требует визуального контроля за толщиной оставляемой угольной пачки и не позволяет обеспечить приемлемую точност отслеживания рельефа пласта. Наиболее близким к изобретению по технической сущности и достигаемому результату является способ определения порогов срабатывания системы управления угольным комбайном в профил пласта, основанный на измерении сигнала пропорционального толщине угол ной пачки и заключающийся в том, что перед началом работы комбайна устана ливают некоторые приближенные пороги срабатывания системы управления, затем в процессе работы производят несколько последовательньрс замеров тол щины оставляемой угольной пачки, по результатам каждого замера корректируют пороги срабатывания и путем последовательных приближений устанавливают необходимые значения кодов срабатывания системы, соответствующие максимальной и минимальной задан ным толщинам оставляемой угольной пачки 2 . Однако известный способ определения порогов срабатывания системы весьма трудоемок, неточен и требует производства замеров вручную в зоне опасного действия режущего органа комбайна. Целью изобретения является повьшение точности и эффективности определения порогов срабатывания системы управления угольным комбайном в профиле пласта путем автоматизации процессов измерения сигнала и установления верхнего и нижнего порогов срабатывания, соответствующих максимальной и минимальной заданным толщинам оставляемой угольной пачки. Поставленная цель достигается тем, что согласно способу определения порогов срабатывания системы управления угольным комбайном в профиле пласта, основанному на измерении сигнала, пропорционального толщине угольной пачки,задают величину сигнала, соответствующую толщине угольной пачки, превышающей глубинность измерения, затем измеряют, текущие значения сигнала, соответствующие уменьшению толщинц угольной пачки до получения сигнала, соответствующего нулевой толщине угольной пачки, и устанавливают пороги срабатывания системы, которые определяют по формулам N- N Mcitc мин макс МО|ЦС .МИН NMMH, „ - значение верхнего порога срабатывания; NJ. - значение нижнего порога срабатывания; Магс максимальное значение сигнала ; минимальное значение сигнала;h(-. - величина глубинности измерения;Motc максимальная заданная толтолщина оставляемой угольной пачки; h.„„ - минимальная заданная толщина оставляемой угольной пачки. На чертеже изображена функциональная схема устройства, реализующего предлагаемый способ определения порогов срабатывания системы автоматического управления угольным комбайном в профиле пласта. Устройство содержит размещенные на режущем органе комбайна изотопный датчик 1 порода-уголь с источником 2 излучения и детектором 3, шнековый блок 4 с автономным источником 5 питания и передающей катушкой 6 индуктивности, и размещенную на корпусе комбайна приемную катущку 7 индуктивности, подключенную к приемному блоку 8, выход которого соединен с информационными входами управляемых электронных ключей 9 и 10, уп равляющие входы которых соединены с первым и вторым выходами решающего блока 11, а выходы соединены соответ ственно с входами основного 12 н дополнительного 13 блоков управления. Выходы блоков 12 и 13 управления сое динены с входом электрогидроперекпючателя 14. Второй выход дополнительного блока 13 управления соединен с входом блока 15 сравнения, выход которого соединен с входом решающего блока 1I, третий и четвертьй выходы которого через задающие элементы 16 и 17 соединены с вторым и третьим входами основного блока 12 управления, при этом пятый выход решающего блока 11 подключен к входу индикатора 18 режимов. . Способ настройки системы управления угольным комбайном в профиле пласта, например, по сигналам датчика 1 порода-уголь заключается в том, что перед началом работы комбайна его режущий орган переводят в положение, при котором оставляемая уголь ная пачка превьщгает глубинность датчика 1 порода-уголь, затем включают режим настройки и при этом решающий блок 11 своими управляющими сигналам закрывает ключ 9 открывает ключ 10, включает индикатор 18 режимов, в результате чего сигналы с датчика поро да-уголь начинают поступать в дополнительный блок 13 управления, а затем на блок 15 сравнения. Таким образом в блоке 15 сравнения задают величину сигнала (N,), соответствующую толщине угольной пачки, превышающей глубинность измерения датчи ка 1 порода-уголь. Затем с помощью дополнительного блока 13 управления, и подключенного к его выходу электро гидропереключателя 14 производят автоматическое пошаговое перемещение режущего органа в сторону породы и после .каждого перемеще ния в блоке 15 сравнения производят измерение теку 084 1 пощего значения сигнала с датчика рода-уголь и сравнение его с предыдущим значением сигнала, до тех пор пока разность между текущими и предыду- ; щими значениями сигнала не станет меньше заранее заданной величины. Полученное минимальное значение сигнала также фиксируют в блоке 15 сравнения, затем максимальное .; и минимальное N значения сигнала передают в решающий блок 11, с помощью котЬрого расчитывают значения верхнего Nn и нижнего N), порогов срабатывания cHCTeNJbi, после чего эти значения вносят в задающие элементы 16 и 17. По окончании процесса определения порогов срабатывания системы решающий блок 1I своим Сигналом отключает индикатор 18 режимов, информируя тем самым оператора о том, что пороги срабатывания определены, и система готова к работе в основном режимеавтоматического управления угольным, комбайном в профиле пласта. В режиме автоматического управления угольным комбайном система работает следующим образом. Оператор с помощью кнопки (не показана) подает сигнал на решающий блок 11, который своими управляющими сигналами открывает электронный ключ 9и закрывает электронный ключ 10, сигналы с датчика 1 порода-уголь начинают поступать на шнековый блок 4, где усиливаются и с помощью переда- ющей катушки 6 индуктивности поступают на приемную катушку 7 индуктивности. Усиленные приемным блоком 8 сигг- . налы датчика 1 через открытый электронный ключ 9 поступают на основной блок 12 управления. Электронный ключ 10в это время закрыт и не пропускает сигналы датчика на дополнительный блок 13 управления. В ячейках памяти элементов 16 и 17 записаны значения верхнего и нижнего порогов срабатывания системы. В соответствии с заданным алгоритмом работы и значениями верхнего и нижнего порогов срабатьшания системы основной блок 12 управления анализирует информацию и с помощью электрогидропереключателя 14 производит в случае необходимости подъем или опускание режущего органа комбайна.
Как показывают результаты испытаний предлагаемый способ помимо повышения точности и эффективности определения порогов срабатывания системы в режиме настройки позволяет также обеспечить 5 и более точное вождение/ комбайна по
гипсометрии пласта в режиме автоматического управления, благодаря чему увеличивается количество добываемого из лавы угля, уменьшается присечка породы и снижается аварийность угольного комбайна.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля скрытой границы порода-уголь | 1980 |
|
SU911030A1 |
| Устройство автоматического управления угледобывающей машиной в профиле пласта | 1978 |
|
SU964138A2 |
| Устройство для управления положением исполнительного органа горной машины в профиле пласта | 1974 |
|
SU779577A1 |
| Устройство для автоматического управления угледобывающей машиной в профиле пласта | 1977 |
|
SU899933A1 |
| Способ автоматического управления в профиле пласта угледобывающими струговыми комплексами и агрегатами фронтального действия | 1984 |
|
SU1221344A1 |
| Способ автоматического управления очистным комбайном по гипсометрии пласта и система для его осуществления | 1985 |
|
SU1270323A1 |
| Система автоматического управления очистным комбайном в профиле пласта | 1986 |
|
SU1423738A1 |
| Устройство контроля границы порода-уголь пласта для горной машины,на исполнительных органах которой установлены режущие зубки | 1982 |
|
SU1046505A1 |
| Способ измерения толщины угольной пачки и устройство для его осуществления | 1986 |
|
SU1416689A1 |
| Способ автоматического управления комбайном по гипсометрии пласта и устройство для его осуществления | 1981 |
|
SU987094A1 |
СПОСОБ ОПРЕДЕЛЕНИЯ ПОРОГОВ СРАБАТЫВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ УГОЛЬНЫМ КОМБАЙНОМ В ПРОФИЛЕ ПЛАСТА, основанный на измерении сигнала, пропорционального толщине угольной пачки, отличающийся тем, что, с целью повышения точности и эффективности определения порогов срабатьшания, задают величину сигнала, соответствующую толщине угольной пачки, превышающей глубинность измерения, затем измеряют текущие значения сигнала, соответствзгкмцие уменьшению толщины угольной пачки до получения сигнала, соответствующего нулевой толщине угольной пачки, и устанавливают пороги срабатывания системы, которые определяют по формулам N - N макс мин N, ммн/ макс ллин мин мин N. ЧА гдеК„ - значение верхнего порога (Л срабатывания; с NJJ - значение нижнего порога срабатьшания; .Макс максимальное значение сигнала; Мин минимальное значение сиго со со оо о нала; hj, - величина глубинности измерения ; мокс максимальная заданная толщина оставляемой угольной пачки; 00 h дд| - минимальная заданная толщина оставляемой угольной пачки.
Рехущи13 орган -n hn
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ярыгин Б | |||
| E.JЛарин В | |||
| Д.,1альцев Л | |||
| Е | |||
| Система автоматического управления исполнительными органами комбайна с электрогидравлическим датчиком порода-уголь типа Рубин | |||
| - В кн | |||
| Шахтная автоматика, Киев, Техника, 1975, с | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| А | |||
| и др | |||
| Регулятор с изотопным датчиком порода-уголь для управления очистными комбайнами по гипсометрии пласта | |||
| Уголь, 1976 № 1-2, с | |||
| Способ сужения чугунных изделий | 1922 |
|
SU38A1 |
