Изобретение относится к области автоматического управления подъемно транспортными машинами и может быть использовано в системах программног управления с целью получения точных конечных положений объекта управления. Известно устройство, содержащее первый.и второй датчики конечного положения объекта управления, прямые выходу которых соединены с шиной запуска, третий и четвертый элементы И первый и второй элементы ИЛИ,первый и второй блоки задержки, первый и второй инверторы и первый и второй усилители, причем инверсные выходы датчиков конечного положения объекта управления соединены с соответствующими входами третьего и четвертого элементов И, входы первого элемента ИЛИ соединены с выходом первого if третьего элементов И, а выходы через первый блок задержки соединены со входами первого усилителя и второго инвертора, выход которого соеди нен с одним из входов второго элемента ИЛИ, другой вход которого соединен с выходом второго элемента И, а выход через второй блок задержки соединен со вторым усилителем и Первым инвертором, выход которого соединен с третьим входом третьего элемента И 1. Однако известное устройство имеет недостаток, связанный с тем, что максимально возмсосная скорость перемещения объекта управления определяется его инерционностью, так как при резком увеличении сксфости происходят пробеги положения останова, что нежелательно в системе автоматического управл ени я. В связи с этим приходите ограничивать скорость перемещения объжта управления, что в свсио очередь, приводит к Уменьшению быстродействия, а следовательно, и прсжзводительности систем, использующих подобные устройства. Цель изобретения - расширение области применения устройства. Поставленная цель достигается , что устройство снабжено третьим усилителем, третьим элементом ИЛИ, пятым, шестым, седьмым, восьмым элементами И, третьим, четвертым, пятым, шестым инверторам, третьим и четвертом датчиками конечного положения, причем вход третьего усилителя подключен к выходу третьего элемента ИЛИ, входы которого подключены к выходам пятого
и шестого элементов И, первые входы которых подключены к выходам соответственно второго и первого блсэков эаЙё15 КИг а вторые в колы пояключёна к выходам соответственно третьего и четвертого инверторов, входы которых подключены к выходам соответственно третьего и четвертого датчиков конечного положения, выходы которых подключены к первым входам соответст1зенно седьмого и йосьмогр ;эл5емёнтов И, вторые входы которых подключены к выходам соответственно первого и второго датчиков конечного положения, а выходы седьмого и восьмого элементов И подключены ко вторым входам соответственно первого и второго элементов И и ко.входам соответст.венно пятого и шестого инверторов, П1ричем выход пятого инвертора под- ключен ко вторым входам третьего и четвертого элементов И, а выход шестого инвертора подключен к третьим входам третьего и четвертого элеменг тов И.
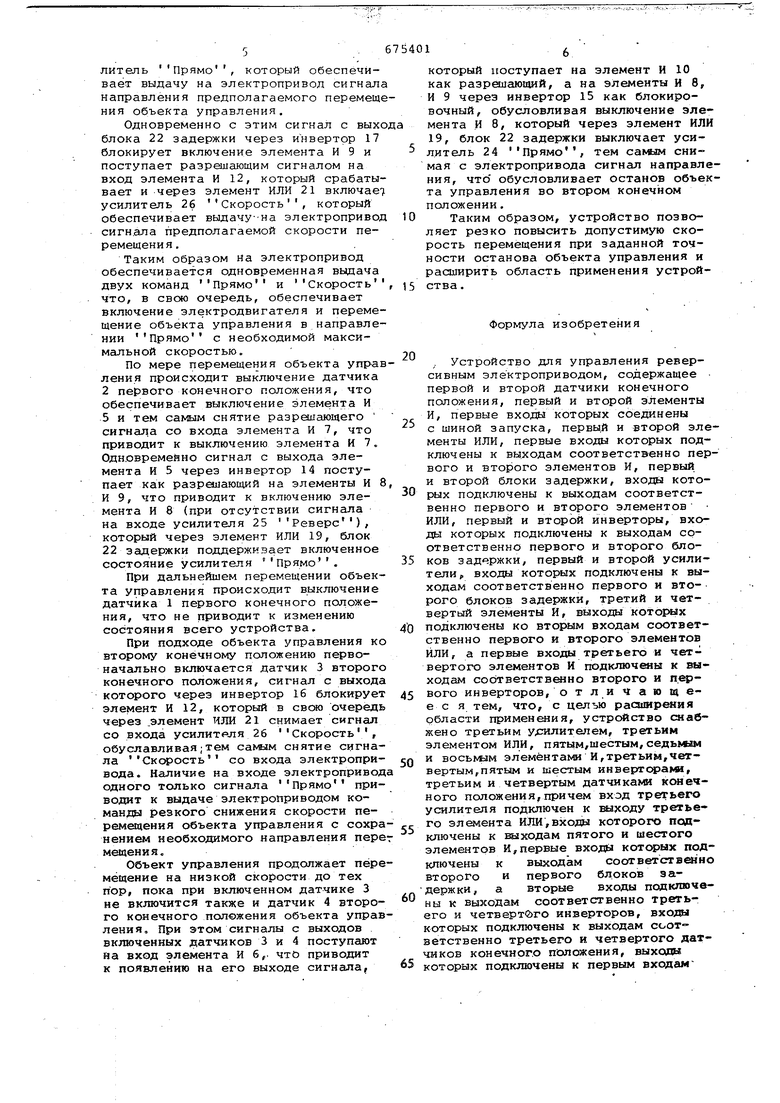
На чертеже представлёна структурная электрическая схема устройства.
Устройство содержит датчики 1-4 Конечного положения объекта управления, элементы И 5-12, инверторы 13- 18, элементы ИЛИ 19, 20 и 21, блоки 22 и 23 задержки, усилитель 24 Пря , усилитель 25 Реверс, усилитель 26 Сксф ость , шину 27 запуска.Выходы датчиков 1,2 первого конечного положения подключены ко входам элемента И 5, кроме того выход датчика 1 поДкйочен также через ин вертор 13 к первому входу элемента
И 11.. ,. . ..
Выходы датчиков 3 и 4 второго конечного положения йодключеиы ко входам элемента И б, кроме того выход датчика 3 подключен также через инвертор 16 к первому входу элемента И 12.
Шина 27 запуска подключена к первым входам элементов И 7 и 10. Выход элемента И 5 непосрелственно подключен ко второму входу элементаИ ,7, а через инвертор 14 к первым вхоД&м элемента И 8 и 9, Вйхсщ элемента И б непосредственно подключен ко входу элемента И 10, а через инвертор 15 ко вторым входам элементов И 8 и 9. Выходаа элементов И 7 и 8 через элемент ИЛИ 19 подключены ко входу блока 22 задержку. Внходаа элементов и 9 и 10 через элемент ИЛИ 20 подключены ко входу блока 23 задержки. Выход блока 22 задержки подключен непосреяственно ко входу усгилителя 24 Прямо и втсчрому входу элемента И 12, а через инвертор 17 к третьему входу элемента И 9 о Шход блока 23 залеркскк подключен непосредственио ко входу усилителя 25 Реверс к второму sscesj элемента И 11, а через HHSeprop.lS
к третьему .входу элемента И 8. Выходы элементов И 11 и 12 через элемент или21 подключены ко входу усилителя 26 Скорость.
Устройство работает следую1дим образом.
Объект управления перемещается по направляющим от одного конечного положения до другого. В каждом конечном положении на направляющей установлены по два датчика 1, 2 и 3, 4 конечного положения. Включение датчиков осуществляется флажком, установленным на объекте управления, который воздействует на датчик. Флажок и установлен таким образом, что при подходе к одному из конечных положений он включает один датчик, а при дальнейшем перемещении объекта управления в том же направлении он включает другой датчик, оставляя в то же время включенным первый датчик. Таким образом, нахождение объекта управления в одном из крнечных положений характеризуется включением обоих датчиков данного конечного положения. В том случае, когда объектуправления находится в одном из конечных положений, например в первом конечном положении, которое характеризуется включенным состоянием датчиков 1 и 2, датчики 3 и 4 выключеньз.
Сигналы с заходов датчиков 1 и 2 поступают на входа элемента И 5, формируя на его ,выходе разрешающий сигнал перемещения, который поступает на вход элемента И 7 как разрешающий, а через инвертор 14 на входаз элементов И 8 и 9 как блокирующий (запрещающий) . .
Сигналы с выходов выключенных датчиков 3 и 4 второго конечного положения объекта управления, поступая на входы элемента И б, обуславливают появление на его выходе блокирующего (запрещающего) сигнала, который подается на вход элемента И 10, а через инвертор 15 поступает на входы здементрв И 8 и 9 как разраиающийiсигнал , - - .
Сигнал с шхода включенного датчика 1 первого конечного положения объекта управления через инвертор 13 поступает как блокирующий на вход элемента. И 11.
Сигнал с выхода выключенного датчика 3 второго конечного положения объекта управления через инвертор 16 поступает разроаающий на вхсд элемента И 12, подготавливая егок включению.
С приходом разрвыающего сигнала 0 по шине 27 запуска элемент И 7 срабатывает н сигнал с . его вы:хода через элемент ИЛИ 19 поступает на вход блока 22 задержки. Через определенное время (определяемое временем отра5 блока 22 задержки) сигнал с выкод® блока 22 задержки включает усилитель Прямо который обеспечивает выдачу на электропривод сигнал направления предполагаемого перемещ ния объекта управления, Одновременно с этим сигнал с вых блока 22 задержки через инвертор 17 блокирует включение элемента И 9 и поступает разрешающим сигналом на вход элемента И 12, который срабаты вает и через элемент ИЛИ 21 включае усилитель 26 Скорость, который обеспечивает выдачу-на электроприво сигн.ала предполагаемой скорости перемещения. Таким образом ма электропривод обеспечивается одновременная выдача двух команд Прямо и Скорость что, в свою очередь, обеспечивает включение электродвигателя и переме щение объекта управления в направле нии Прямо с необходимой максимальной скоростью. По мере перемещения объекта упра ления происходит выключение датчика 2 первого конечного положения, что обеспечивает выключение элемента И 5 и тем самым снятие разрапающего сигнала со входа элемента И 7, что приводит к выключению элемента И 7. Одн.овремейно сигнал с выхода элемента И 5 через инвертор 14 поступает как разрешающий на элементы И 8 И 9, что приводит к включению элемента И 8 (при отсутствии сигнала на входе усилителя 25 Реверс), который через элемент ИЛИ 19, блок 22 задержки поддерживает включенное состояние усилителя Прямо. При дальнейшем перемещении объекта управления происходит выключение датчика 1 первого конечного положения, что не приводит к изменению состояния всего устройства. При подходе объекта управления ко второму конечному положению первоначально включается датчик 3 вторюго конечного положения, сигнал с выхода которого через инвертор 16 блокирует элемент И 12, который в свою очередь через .элемент ИЛИ 21 снимает сигнал со входа усилителя 26 Скорость, обуславливая;тем самым снятие сигнаСкоростьсо входа электропривода. Наличие на входе электропривод одного только сигнала прямо приводит к выдаче электроприводом команды резкого снижения скорости переметцения объекта управления с сохра нением необходимого направления nepe метения. Объект управления продолжает пере мещение на низкой скорости до тех пор, пока при включенном датчике 3 не включится также и датчик 4 второго конечного положения объекта управ ления. При этом сигналы с выходов включенных датчиков 3 и 4 поступают ifja вход элемента И б,, что приводит к появлению на его выходе сигнала, который поступает на элемент И 10 как разраиающий, а на элементы И 8, И 9 через инвертор 15 как блокировочный, обусловливая выключение элемента И 8, который через элемент ИЛИ 19, блок 22 задержки выключает усилитель 24 Прямо, тем самым снимая с электропривода сигнал направления, что обусловливает останов объекта управления во втором конечном положении, Таким образом, устройство позволяет резко повысить допустимую скорость перемещения при заданной точности останова объекта управления и расширить область применения устройства , Формула изобретения Устройство для управления реверсивным электроприводом, содержащее первой и второй датчики конечного положения, первый и второй элементы И, первые входы которых соединены с шиной запуска, первы.й и второй элементы ИЛИ, первые входы которых подключены к выходам соответственно первого и второго элементов И, первый и второй блоки задержки, входы которых подключены к выходам соответственно первого и второго элементов ИЛИ, первый и второй инверторы, входы которых подключены к выходам соответственно первого и второго блоков задержки, первый и второй усилители, входы которых подключены к выходам соответственно первого и второго блоков задержки, третий и четвертый элементы И, выходы KOtoF«x подключены ко вторым входам соответственно первого и второго элементов ИЛИ, а первые входы третьего и четвертого элементов И подключены к выходам соответстведно второго и первого инверторов, о т ли ч а ю щ ее с я тем, что, с целъю расширения области применения, устройство снабжено третьим у жлителем, третьим элементом ИЛИ, пятым,шестым,седылгм и восьмым элементами И,третьим,четвертым,пятым и шестым инвертсчрам, третьим и четвертым датчиками конечного положения,причем вход третьего усилителя подключен к выходу третьего элемента ИЛИ,входы которого подключены к выходам пятого и шестого элементов И,первые входа которых подключены к выходам соответственно второго и первого блоков завходы подключевторыедержкИ; ны к выходам соответственно третьго и четверт г)го инверторов, входа) оторых подключены к выходам соотетственно третьего и четвертого датиков конечного положения, выхсш оторых подключены к первым входам
соответственно седьмого и восьмого элементов И, вторые входы которых подключены к выходам соответственно первого и второго датчиков конечного положения, а выходы седьмого и восьмого элементов И подкл рчены ко вто рым входам соответственно первого и второго элементов И и ко входам соответственно пятого и mecTOj b HUBepторой, причем выход пятого ййвертЬ754018
ра подключен ко вторым гходам третьего и четвертого элементов И, а выход шестого инвертора подключен к третьим входам третьего и четвертого элементов И.
5Источники информации, принятые во
внимание при экспертизе
1. Авторское свидетельство СССР 36.7412, кл. G 05 в 19/04, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления реверсивным электроприводом | 1974 |
|
SU540257A1 |
| Устройство для управления реверсивным электроприводом | 1978 |
|
SU767706A1 |
| Устройство для управления реверсивным электроприводом | 1975 |
|
SU699489A1 |
| Устройство для управления исполнительным органом | 1974 |
|
SU603950A1 |
| Устройство для управления реверсивным электроприводом | 1981 |
|
SU993209A1 |
| Устройство для управления реверсивным электроприводом | 1991 |
|
SU1833840A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2019 |
|
RU2713624C1 |
| Электропривод переменного тока | 1979 |
|
SU1450765A3 |
| ЭЛЕКТРОПРИВОД С АВТОМАТИЧЕСКОЙ ПОДСТРОЙКОЙ ЧАСТОТЫ ВХОДНОГО ГАРМОНИЧЕСКОГО СИГНАЛА | 2008 |
|
RU2399079C2 |
| Система терминального управления упругим объектом | 1987 |
|
SU1434403A1 |
