к первому входу девятого элемента И, связанного выходом с выходом селектора, а вторым входом - с выходом шестого элемента И и с первым входом пятого элемента ИЛИ, подключенного вторым входом к четвертому входу селектора, а третьим входом - к выходу
пятого элемента И, соединенного вторым входом с выходом второго формирователя импульсов, причем второй и третий входы шестого элемента ИЛИ подключены к выходам соответственно третьего и седьмого элементов И, а выход - к входу элемента задержки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения угловых перемещений удаленного объекта и устройство для его осуществления | 1989 |
|
SU1626087A1 |
| Устройство для программного управления | 1987 |
|
SU1474595A1 |
| Система совместного управления штабелерами | 1990 |
|
SU1754595A1 |
| Устройство для сопряжения каналов ввода-вывода с абонентом | 1983 |
|
SU1160422A1 |
| УСТАНОВКА СТРУЙНОЙ ПРОМЫВКИ ДЕТАЛЕЙ | 1990 |
|
RU2054978C1 |
| УСТРОЙСТВО ДЕКОДИРОВАНИЯ РТСМ | 2008 |
|
RU2390930C2 |
| Запоминающее устройство с самоконтролем | 1989 |
|
SU1718276A1 |
| Матричное устройство для деления | 1983 |
|
SU1141402A1 |
| Устройство для контроля и управления структурой вычислительного комплекса | 1985 |
|
SU1247878A1 |
| Следящая система | 1988 |
|
SU1571547A1 |
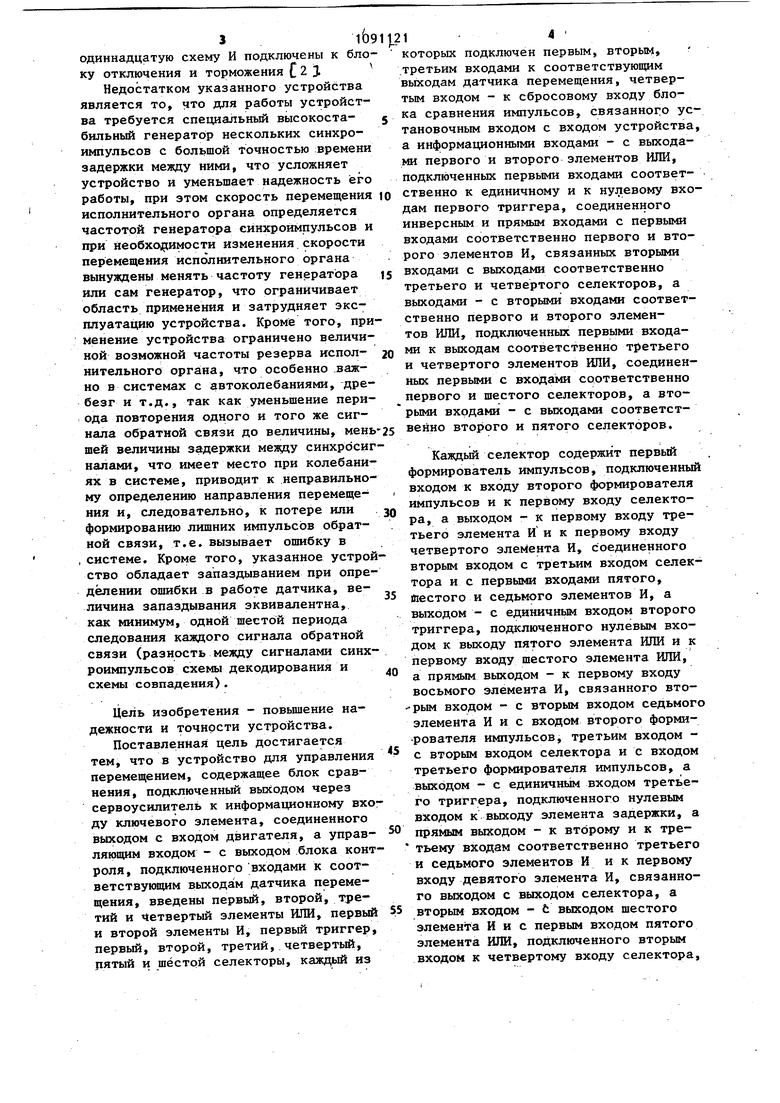
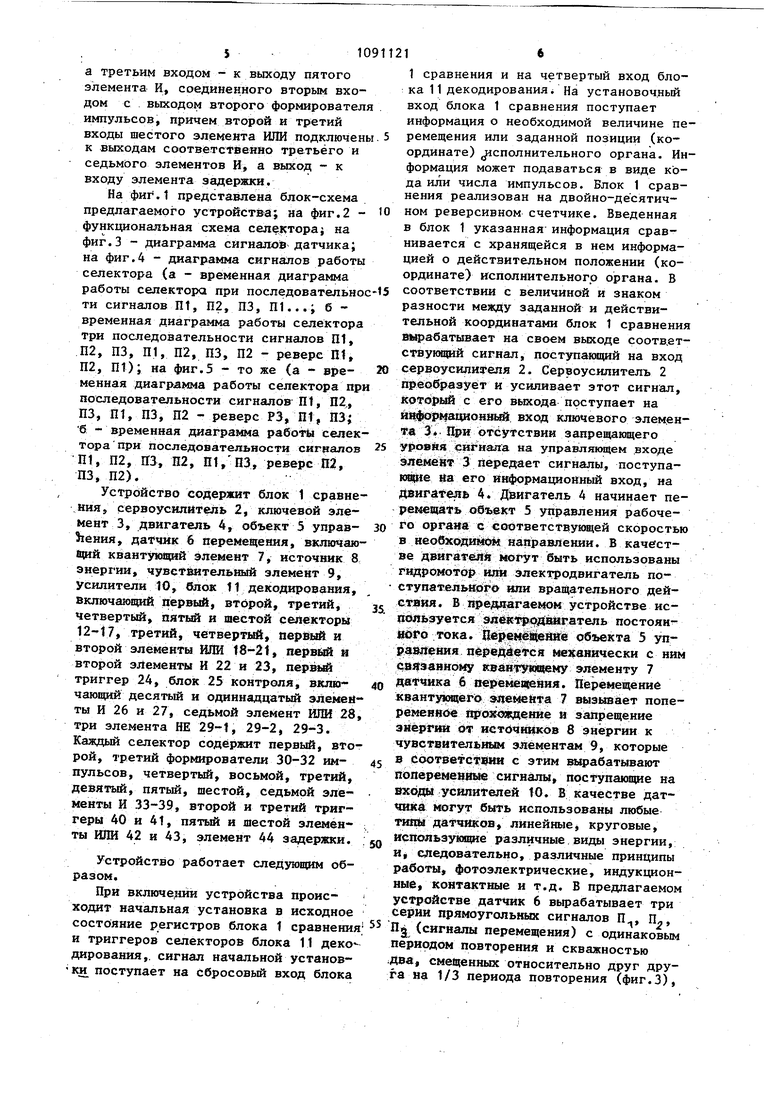
1. УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ, содержащее блок сравнения, подключенный выходом через сервоусилитель к информационному входу ключевого элемента, соединенного выходом с входом двигателя, а управляющим входом - с выходом блока контроля, подключенного входами к соответствующим выходам датчика перемещения, отличающееся тем, что, с целью повьшения надежности и точности устройства, в него введены первый, второй, третий и четвертый элементы ИЛИ, первый и второй элементы -И, первый , первый, второй, третий, четвертый, пятый и шестой селекторы, каждьш из которых подключен первым, вторым, третьим входами к соответствующим выходам датчика перемещения, четвертым входом - к сбросовому входу блока сравнения импульсов,- связанного установочным входом с входом устройства, а информационными входами - с выходами первого и второго элементов ИЛИ, подключенных первыми входами соответственно к единичному и к нулевому входам первого триггера, соединенного инверсным и прямым входами с первыми входами соответственно первого и второго элементов И, связанных I tvT. , вторыми входами с выходами соответственно третьего и четвертого селекторов, а выходами - с вторыми входами соответственно первого и второго элементов ИЛИ, подключенных первыми входами к вькодам соответственно третьего и четвертого элементов ИЛИ, соединенных первыми входами с выходами соответственно первого и шестого селзкторов, а вторыми входами - с выходами соответственно второго и пятого селекторов. 2. Устройство по П.1, о т л и ч а ю щ ее с я тем, что каждый селектор содержит первый формирователь импульсовj подключенный входом к вхо(/) ду Второго формирователя импульсов и к первому входу селектора, а выходомк первому входу третьего элемента И и к первому входу четвертого элемента И, С в соединенного вторым входом с третьим входом селектора и с первыми входами пятого, шестого и седьмого элемен тов И, а выходом - с единичным входом 00 второго триггера, подключенного нулевым входом к выходу пятого элемента ИЛИ и к первому входу шестого элемента ИЛИ, а прямым выходом - к первому входу восьмого элемента И, связанного вторым входом - с вторым входом седьмого элемента И и с входом второго формирователя импульсов, третьим входом - с вторым входом селектора и с входом третьего формирователя импульсов, а выходом - с единичным входом третьего триггера, пЬдключенного нулевым входом к выходу элемента задержки, а прямым выходом - к второму и к третьему входам соответственно третьего и седьмого элементов И и
Изобретение относится к автоматике и вычислительной технике и может быть использовано в различных станках и системах с программным числовым управлением.i5
Известно устройство для управления перемещением исполнительного или рабочего органа, обеспечивающие перемещение органа на расстояние, эквивалентное числу импульсоа или коду, вклю- 10 чающие в себя блок сравнения, блок управления исполнительным органом, исполнительный орган, датчик сигналов обратной связи, блок формирования им|1ульсов обратной связи и определения fs направления перемещения органа, блок контроля работы канала обратной связи Г 1 3.
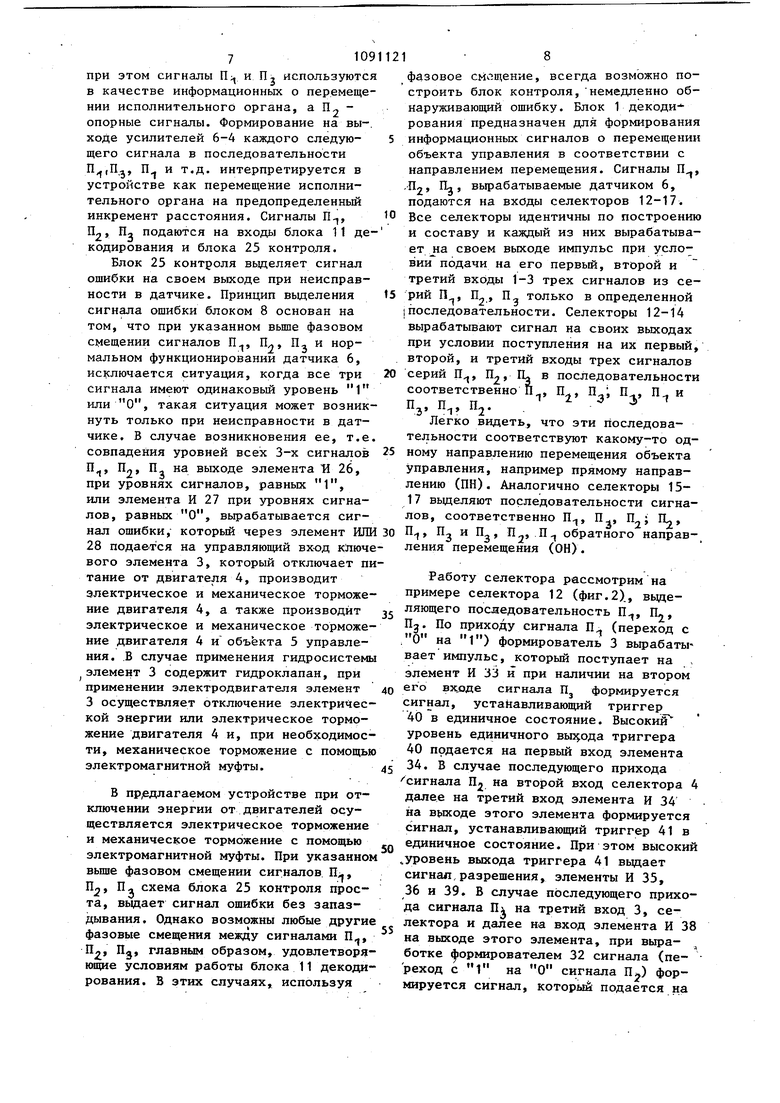
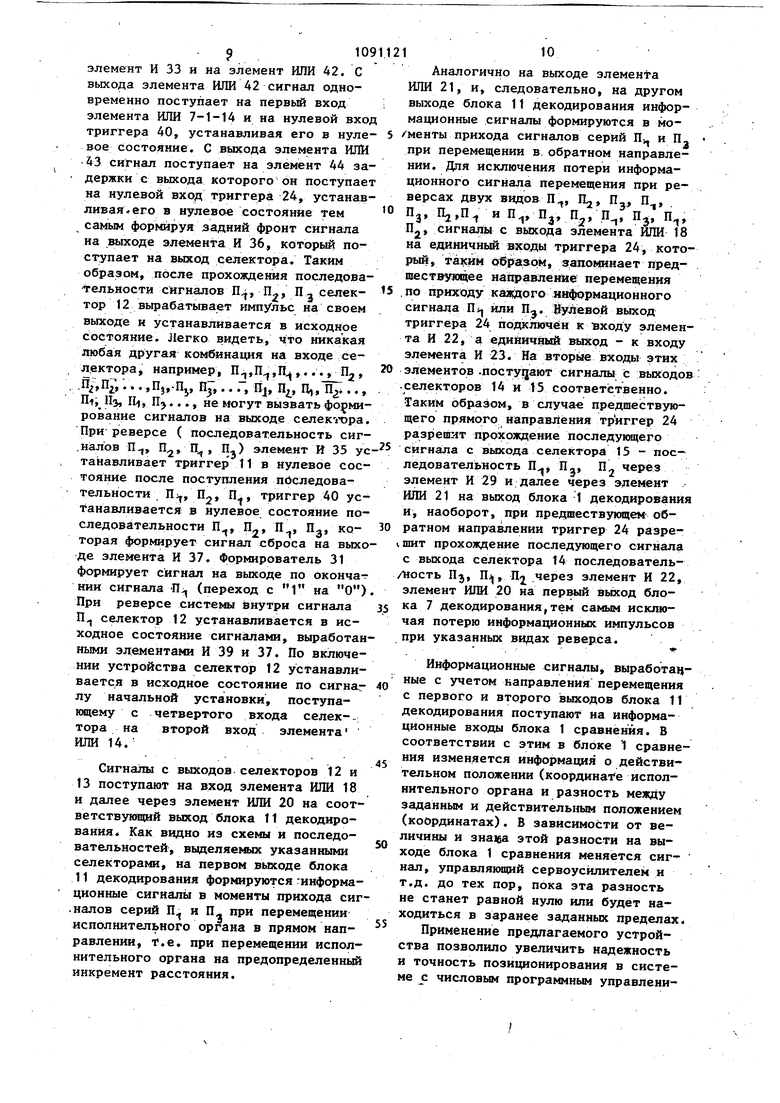
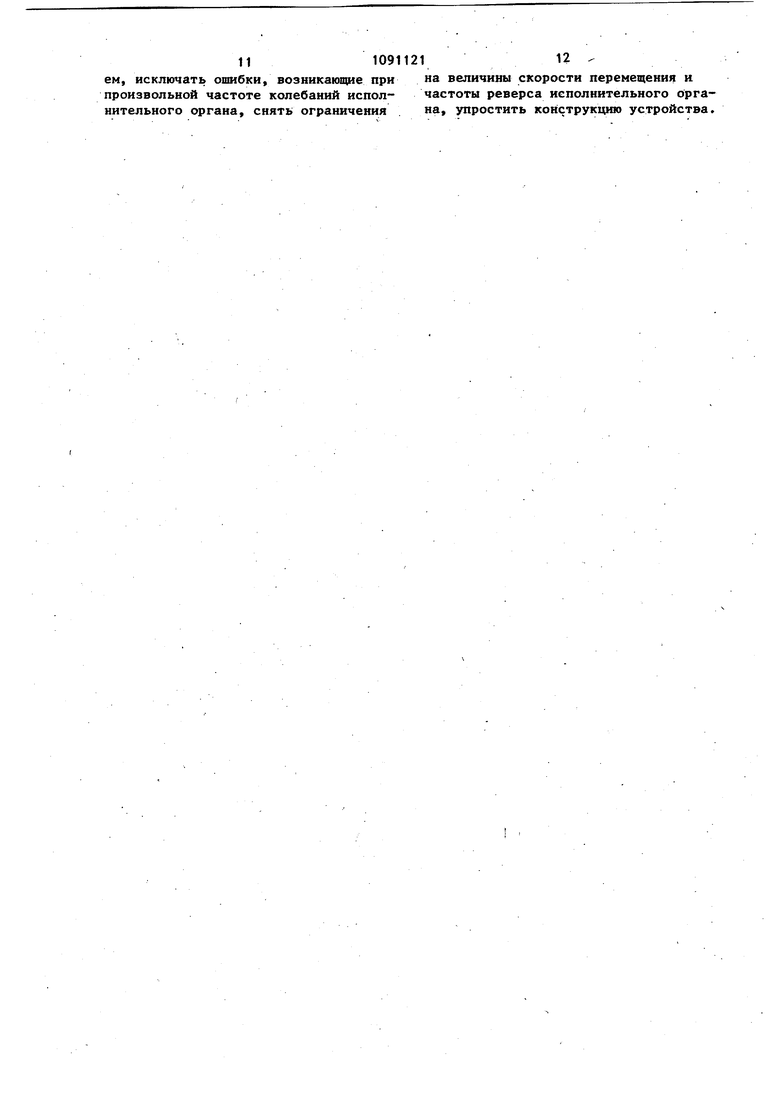
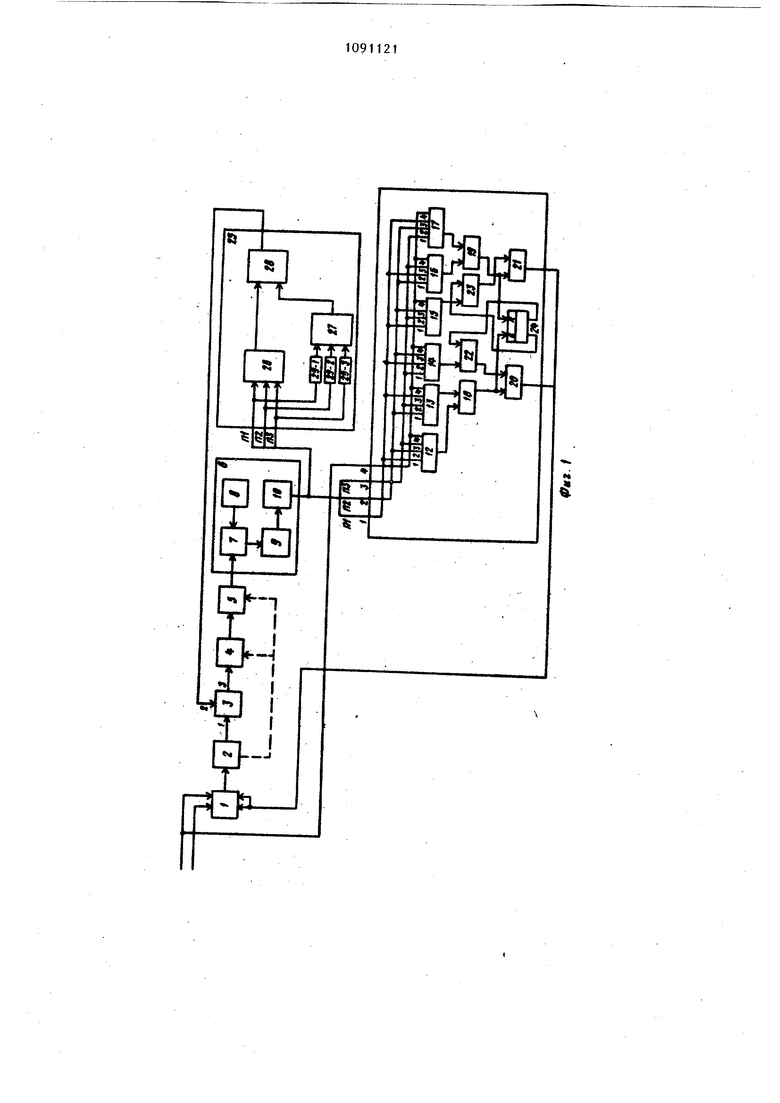
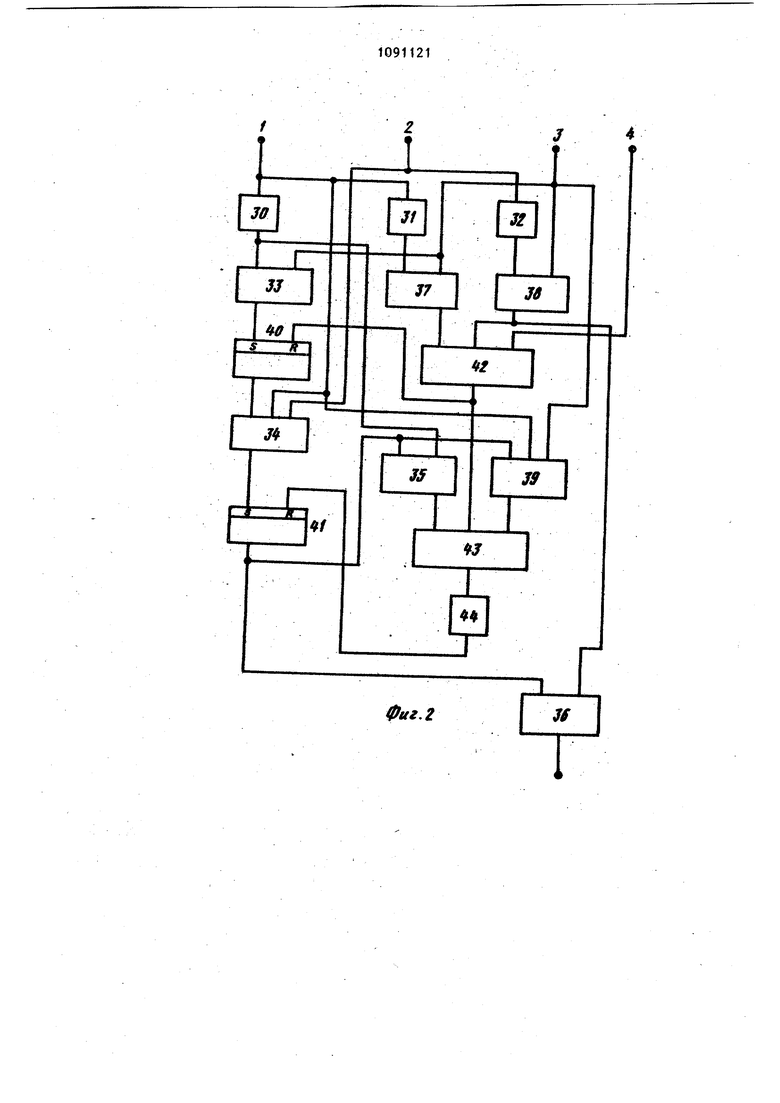
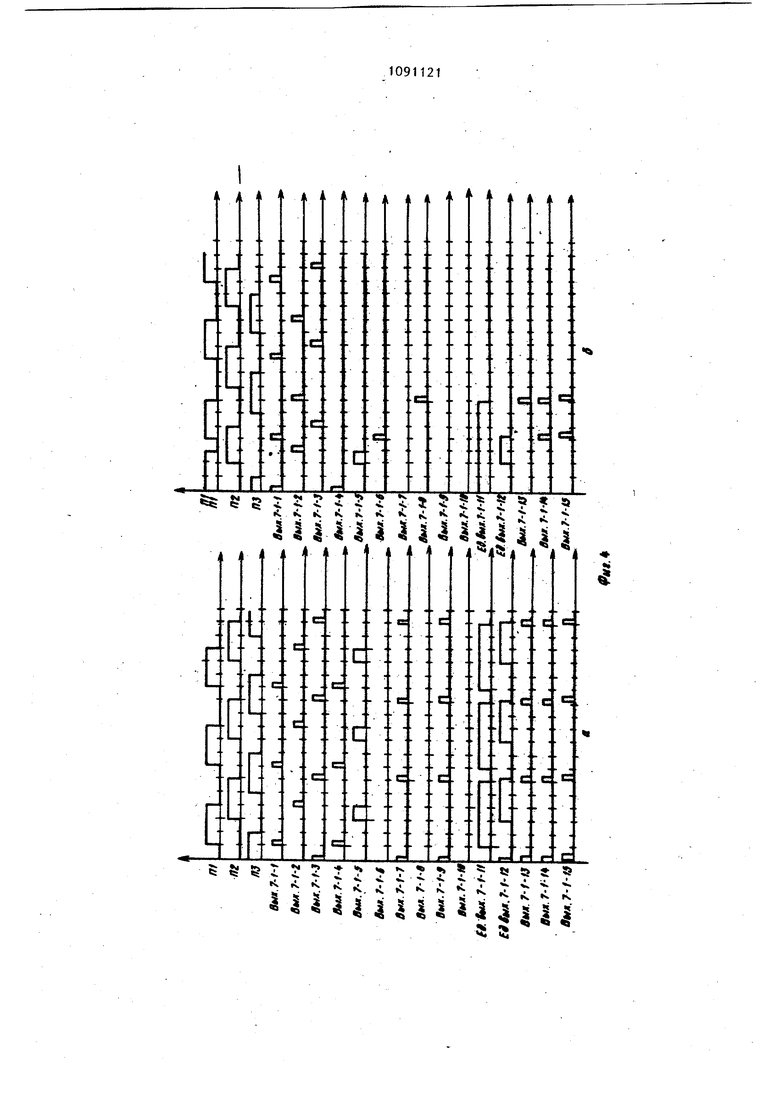
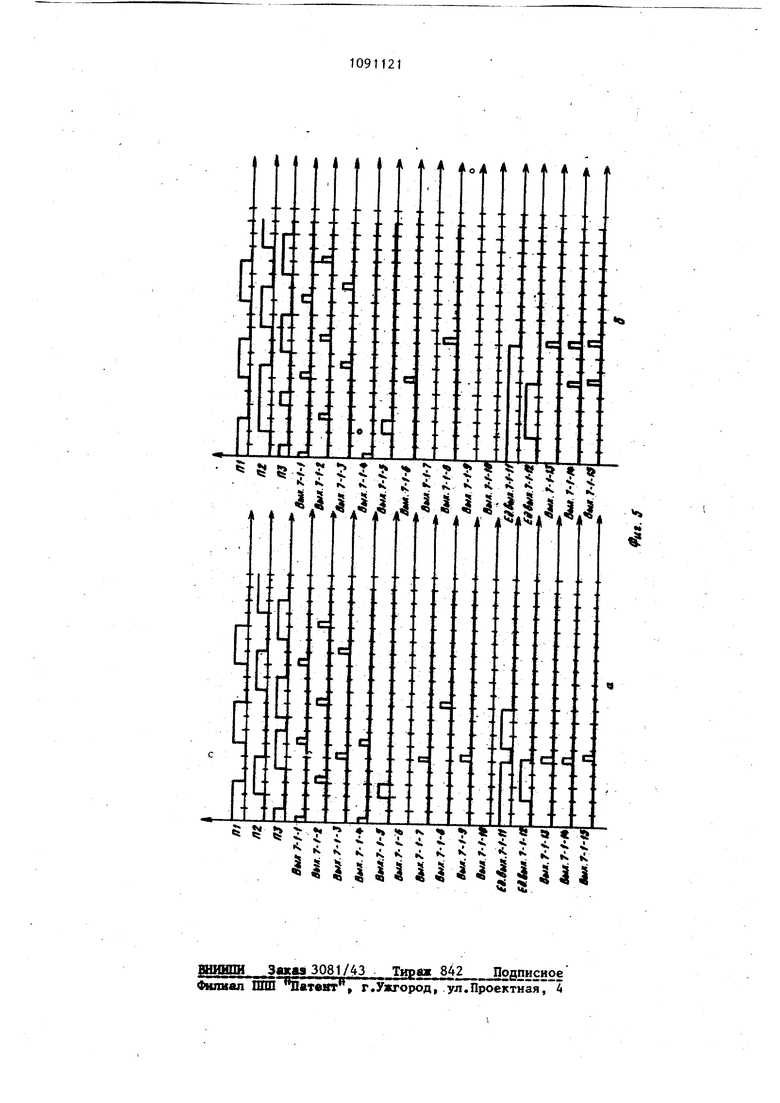
Наиболее близким к предлагаемому является устройство, которое имеет 20 последовательно соединенные блок сравнения, сервоусилитель, блок отключения и торможения, двигатель, исполнительный орган, датчик, состоящий из квантующего элемента, источ- 25 НИКОВ энергии, чувствительньк элементов и усилителей, выходы которых подключены к входам трех декодирующих схем,выходы которых подключены к блоку сравнения и через схемы сов- зо падения - к детектору ошибки, выход которого подключен к блоку отключения и торможения. Каждая из декодирующих схем состоит из первого и второго инверторов, причем выход первого инвер- ,, тора подключен к входу второго инвертора и одному из выходов первой схемы И, а выход второго инвертора - к одному из входов второй схемы И, выходы первой и второй схем И подключены к первым входам соответственно третьей и четвертой схем И, на вторые входы которых подается синхросигнал, и выходы которых подключены к нулевым входам первого и второго триггеров, на единичные входы которых подается синхросигн ал и выходы которых подсоединены к вторым входам соответственно пятый и шестой, седьмой и восьмой схем И, причем выходы пятой и шестой схем И подсоединены к нулевым, а седьмой и восьмой - к единичным входам третьего триггера, единичный выход которого подключен к одному из входов первой схемы И, и к входу четвертого инвертора, а нулевой - к одному из входов второй схемы Ник входу третьего инвертора. При этом на первые входы пятой, шестой, седьмой и восьмой схем И подается синхросигнал, а третьи входы пятой и шестой схем И, первой декодирующей схемы подключены к выходам соответственно третьего и четвертого инверторов второй декодирукмцей схемы, а третьи входы седьмой и восьмой схем И - к выходам третьего и четвертого инверторов третьей декодирующей схемы. Аналогичным образом связаны между собой третьи входы пятой, восьмой схем И, второй и третьей декодирующих схем с выходами третьего и четвертого инверторов соответственно первой и третьей первой и второй декодирующих схем, при этом выходы первой и второй схем И казвдой из трех декодирующих схем подключены к входам первйй и второй схем И других двух декодирующих схем, а единичные и нулевые выходы триггеров всех трех декодирующих схем подключены к входам соответственно девятой и десятой схем И, выполняющих функцию вьщеления ошибки, выходы которых подключены к единичному входу четвертого триггера, запоминающего сигнал ошибки, выходы которого одиннадцатую схему И подключены к бло ку отключения и торможения С 2 J Недостатком указанного устройства является то, цто для работы устройства требуется специальный высокостабильный генератор нескольких синхроимпульсов с большой точностью времени задержки между ними, что усложняет устройство и уменьшает надежность его работы, при этом скорость перемещения исполнительного органа определяется частотой генератора синхроимпульсов и при необходимости изменения скорости перемещения исполнительного органа вынуждены менять частоту генератора или сам генератор, что ограничивает область применения и затрудняет эксплуатацию устройства. Кроме того, при менение устройства ограничено величиной возможной частоты резерва исполнительного органа, что особенно важно в системах с автоколебаниями, дребезг и т.д., так как уменьшение периода повторения одного и того же сигнала обратной связи до величины, мень шей величины задержки между синхросиг налами, что имеет место при колебаниях в системе, приводит к неправильному определению направления перемещения и, следовательно, к потере или формированию лишних импульсов обратной связи, т.е. вызывает ошибку в системе. Кроме того, указанное устрой ство обладает запаздыванием при определении ошибки в работе датчика, величина запаздывания эквивалентна, как минимум, одной шестой периода следования каждого сигнала обратной связи (разность между сигналами синхроимпульсов схемы декодирования и схемы совпадения). Цель изобретения - повышение надежности и точности устройства. Поставленная цель достигается тем, что в устройство для управления перемещением, содержащее блок сравнения, подключенный выходом через сервоусилитель к информационному входу ключевого элемента, соединенного выходом с входом двигателя, а управ ЛЯЮЩИМ входом - с выходом .блока КОНТ роля, подключенного входами к соответствующим выходам датчика перемещения, введены первый, второй, третий и Четвертый элементы ИЛИ, первый и второй элементы И, первый триггер, первый, второй, третий, четвертый, пятый и шестой селекторы, каждый из lb 1 которых подключен первым, вторым, .третьим входами к соответствующим выходам датчика перемещения, четвертым входом - к сбросовому входу блока сравнения импульсов, связанного установочным входом с входом устройства, а информационными входами - с выходами первого и второго элементов ИЛИ, подключенных первыми входами соответственно к единичному и к нулевому входам первого триггера, соединенного инверсным и прямым входами с первыми входами соответственно первого и второго элементов И, связанных вторыми входами с выходами соответственно третьего и четвертого селекторов, а выходами - с вторыми входами соответственно первого и второго элементов ИЛИ, подключенных первыми входами к выходам соответственно третьего и четвертого элементов ИЛИ, соединенных первыми с входами соответственно первого и шестого селекторов, а вторыми входами - с выходами соответственно второго и пятого селекторов, Каждый селектор содержит первый формирователь импульсов, подключенный входом к входу второго формирователя импульсов и к первому входу селектора, а выходом - к первому входу третьего элемента И и к первому входу четвертого элемента И, соединенного вторым входом с третьим входом селектора и с первыми входами пятого, шестого и седьмого элементов И, а выходом - с единичным входом второго триггера, подключенного нулевым входом к выходу пятого элемента ИЛИ и к первому входу шестого элемента ШШ, а прямым выходом - к первому входу восьмого элемента И, связанного вторым входом - с вторым входом седьмого элемента И и с входом второго формирователя импульсов, третьим входом с вторым входом селектора и с входом третьего формирователя импульсов, а выходом - с единичным входом третьего триггера, подключенного нулевым входом к выходу элемента задержки, а прямым выходом - к второму и к третьему входам соответственно третьего и седьмого элементов И и к первому входу девятого элемента И, связанного выходом с выходом селектора, а вторым входом - t выходом шестого элемента И и с первым входом пятого элемента ИЛИ, подключенного вторым входом к четвертому входу селектора. а третьим входом - к выходу пятого элемента И, соединенного вторым входом с выходом второго формировател импульсов, причем второй и третий входы шестого элемента ШШ подключен к выходам соответственно третьего и седьмого элементов И, а выход - к входу элемента задержки. На фиг.1 представлена блок-схема предлагаемого устройства; на фиг.2 функ1(иональная схема селе;1;тора{ на фиг.З - диаграмма сигналой датчика; на фиг.4 - диаграмма сигналов работы селектора (а - временная диаграмма работы селектора при последовательно ти сигналов П1, П2, ПЗ, Ш...; б временная диаграмма работы селектора три последовательности сигналов П1, П2, ПЗ, П1, П2, ПЗ, П2 - реверс П1 П2, П1); на фиг.З - то же (а - временная диаграмма работы селектора пр последовательности сигналов П1, 112., ПЗ, П1, ПЗ, П2 - реверс РЗ,П1, ИЗ; б - временная диаграмма работй селек тора при последовательности сигналов П1, П2, ПЗ, П2, П1,ПЗ, реверс П2, ПЗ, П2). Устройство содержит блок 1 сравне ния, сервоусилитель 2, ключевой элемент 3, двигатель 4, объект 5 управЗтения, датчик 6 перемещения, включаю 1ций кдантукищй элемент 7, источник 8 энергии, чувствителыглй элемент 9, Усилители 10, блок 11 декодирования. Включающий первый, второй, третий, четвертый, пятый и шестой селекторы 12-17, третий, четвертый, перПмА и второй элементы ИЛИ 18-21, первый и второй элементы И 22 и 23, первьй триггер 24, блок 25 контроля, включающий десятый и одиннадцатый эЛемеЫ ты И 26 и 27, седьмой элемент ШШ 28 три элемента НЕ 29-1, 29-2, 29-3. Каждый селектор содержит первый, второй, третий формирователи 30-32 импульсов, четвертый, восьмой, третий, девятый, пятый, шестой, седьмой элементы И 33-39, второй и третий триггеры 40 и 41, пятый и шестой элемёнты ИЛИ 42 и 43, элемент 44 задержки. Устройство работает следующим образом. При включе ши устройства происходит начальная установка в исходное состояние регистров блока t сравнени и триггеров селекторов блока 11 деко дирования,. сигнал начальной установ KII поступает на Сбросовый вход блока 1 сравнения и на четвертый вход блока 1 1 декодирования На установочный вход блока 1 сравнения поступает информация о необходимой величине перемещения или заданной позиции (координате) исполнительного органа. Информация может подаваться в виде кода или числа импульсов. Блок 1 сравнения реализован на двойно-десятичном реверсивном счетчике. Введенная в блок 1 указанная информация сравнивается с хранящейся в нем информацией о действительном положении (координате) исполнительного органа. В соответствии с величиной и знаком разности между заданной и действительной координатами блок 1 сравнения вырабатывает на своем выходе соотв.етствукицнй сигнал, поступакнций на вход сервоусилителя 2. Сервоусилитель 2 преобразует и усиливает этот сигнал, который с его выхода поступает на HH optfaqHOHUuit вход ключевого элемента 3 При отсутствии запрев(ак«цего уровйя сигнала на управлякнцем входе элемент 3 передает сигналы, поступакщ{е Ма его информационный вход, на двигатеяь 4. Двигатель 4 начинает пеpeMeatatb объект 5 управления рабочего оргаиа с соответствующей скоростью в неовходи «7м направлении. В качестве двигатели могут быть использованы гедромотор или электродвигатель поступательного или вращательного действия . Б предлагаемом устройстве используется элекгр ; ФЁшгатель постоянного гока. Деремё шге объекта 5 управления передается механически с ним свягэанному квантукя№ему элементу 7 датчика б переьжасения. Перемещение квантукщего з емента 7 вызывг1ет попеременней прох якдение и запрещение энергии от источников 8 энергии к чувствительным элементам 9, которые в соотаетсти ия с этим вырабатывают Пояеременяые сигналы, поступающие на входа ycилиteлeй 10. В качестве датtatica могут быть использованы любые тшш датчиков, линейные, круговые, Используюа91е различные вида энергии, И| следовательно, различные принципы работы, фотоэлектрические, индукщюнные, контактные и т.д. В предлагаемом устройстве датчик 6 вьфабатывает три серии прямоугольных сигналов П.,, П Пд(сигналы перемещения) с одинаковьш периодом повторения и скважностью два, смещенных относительно друг друга на 1/3 периода повторения (фиг.З), 7109 при этом сигналы П;, и 111 используются в качестве информационных о перемещении исполнительного органа, а П опорные сигналы. Формирование на вы-, ходе усилителей 6-4 каждого следующего сигнала в последовательности П,П, П и т.д. интерпретируется в устройстве как перемещение исполнительного органа на предопределенный инкремент расстояния. Сигналы П, Пу, П-, подаются на входы блока 11 декодирования и блока 25 контроля. Блок 25 контроля вьщеляет сигнал ошибки на своем выходе при неисправности в датчике. Принцип выделения сигнала ошибки блоком 8 основан на том, что при указанном вьше фазовом смещении сигналов П, П, нормальном функционировании датчика 6, исключается ситуация, когда все три сигнала имеют одинаковый уровень 1 или О, такая ситуация может возникнуть только при неисправности в датчике. В случае возникновения ее, т.е совпадения уровней всех 3-х сигналов П, П„, П,. на выходе элемента И 26, при уровнях сигналов, равных 1, или элемента И 27 при уровнях сигналов, равных О, вырабатывается сигнал ошибки, который через элемент ИЛИ 28 подается на управляющий вх-од ключе вого элемента 3, который отключает пи тание от двигателя 4, производит электрическое и механическое торможение двигателя 4, а также производит электрическое и механическое торможение двигателя 4 и объекта 5 управления. В случае применения гидросистемы элемент 3 содержит гидроклапан, при применении электродвигателя элемент 3 осуществляет отключение электрической энергии или электрическое торможение двигателя 4 и, при необходимости, механическое торможение с помощью электромагнитной муфты. В пр;едлагаемом устройстве при отключении энергии от двигателей осуществляется электрическое торможение и механическое торможение с помощью электромагнитной муфты. При указанно вьщ1е фазовом смещении сигналов П, П,, П- схема блока 25 контроля проста, выдает сигнал ошибки без запаздывания. Однако возможны любые други фазовые смещения между сигналами П, П-, Пд, главным образом, удовлетворя гацие условиям работы блока 11 декоди рования. В этих случаях, используя фазовое смещение, всегда возможно построить блок контроля,немедленно обнаруживающий ошибку. Блок 1 декодирования предназначен для формирования информационных сигналов о перемещении объекта управления в соответствии с направлением перемещения. Сигналы П, Щ, ГЦ, вьфабатываемые датчиком 6, подаются на входы селекторов 12-17. Все селекторы идентичны по построению и составу и каждый из них вырабатывает на своем выходе импульс при условии подачи на его первый, второй и третий входы 1-3 трех сигналов из серий П, П, П только в определенной Последовательности. Селекторы 12-14 вырабатывают сигнал на своих выходах при условии поступления на их первый, второй, и третий входы трех сигналов серий П, П, Пд в последовательности соответственной , П, П ; П , П и П, П,, П. ч .3 3 -т Легко видеть, что эти последовательности соответствуют какому-то одному направлению перемещения объекта управления, например прямому направлению (ПН). Аналогично селекторы 1517 вьщеляют последовательности сигналов, соответственно П, П, П.; П, П, П и П, П, П обратного направления перемещения (ОН). Работу селектора рассмотрим на примере селектора 12 (фиг.2)., вьщеляющего последовательность П, П,, Пд. По приходу сигнала П (переход с О на 1) формирователь 3 вырабатывает импульс, который поступает на элемент И 33 и при наличии на втором его вх,оде сигнала П формируется сигнал, устайавливающий триггер 40 в единичное состояние. Высокий уровень единичного триггера 40 подается на первый вход элемента 34. В случае последующего прихода сигнала П на второй вход селектора 4 далее на третий вход элемента И 34 на в{ 1ходе этого элемента формируется сигнал, устанавливающий триггер 41 в единичное состояние. При этом высокий уровень выхода триггера 41 выдает сигнал.разрешения, элементы И 35, 36 и 39. В случае последующего прихода сигнала П на третий вход 3, селектора и далее на вход элемента И 38 на выходе этого элемента, при выработке формирователем 32 сигнала (переход с 1 на О сигнала пр формируется сигнал, который подается на 109 элемент И 33 и на элемент ИЛИ 42. С выхода элемента ИЛИ 42 сигнал одновременно поступает на первый вход элемента ИЛИ 7-1-14 и на нулевой вход триггера 40, устанавливая его в нулеэое состояние. С выхода элемента ИЛИ 43 сигнал поступае-т на элемент 44 задержки с выхода которого он поступает на нулевой вход триггера 24, устанавливая -его в нулевое состояние тем самым формируя задний фронт сигнала на №1ходе элемента И 36, который поступает на выход селектора. Таким образом, после прохождения последовательности сигналов П, П, П, селектор 12 вырабатьшает импульс на своем выходе и устанавливается в исходное состояние. Легко видеть, что никакая любая другая комбинация на входе селектора , например, П ,П,П,..., П, . И, ..., Пд, U2 2. EI, Из, Iljj Hj..., не могут вызвать формирование сигналов на выходе селек ора. При реверсе ( последовательность сиг.налов П, П-, П,, П) элемент И 35 ус тайавливает триггер 11 в нулевое состояние после поступления пЬследовательности П;, П2, Ш, триггер 40 устанавливается в нулевое состояние последовательности П, П-, П, Пд, которая формирует сигнал сброса на выхо де элемента И 37. Формирователь 31 формирует сигнал на выходе по окончат НИИ сигнала -П (переход с 1 на О) При реверсе системы внутри сигнала П селектор 12 устанавливается в исходное состояние сигналами, выработан ными элементами И 39 и 37. По включении устройства селектор 12 устанавливается в исходное состояние по сигнаг лу начальной установки, поступающему с четвертого входа селек-тора на второй вход элемента ИЛИ 14. Сигналы с выходов селекторов 12 и 13 поступают на вход элемента ИЛИ 18 и далее через элемент ИЛИ 20 на соответствующий выход блока t1 декодирования Как видно из схемы и последовательностей, вылеляемах указанными селекторами, на первом выходе блока 11 декодирования формируются гинформационные сигналы в моменты прихода сиг .налов серий П и П. при перемещении исполнительного органа в прямом направлении, т.е. при перемещении исполнительного органа на предопределенный инкремент расстояния. Аналогично на выходе элемента ИЛИ 21, и, следовательно, на другом выходе блока 11 декодирования информационные сигналы формируются в моменты прихода сигналов серий П, и И, при перемещении в. обратном направлении. Дпя исключения потери информационного сигнала перемещения при реверсах двух видов П, Пз, П,, П, Пд, Пз,,П и П, П,, П,, П - -1 з т П, сигналы с выхода элемента ИЛИ 18 на единичный входы триггера 24, который, таким о6ра:арм, запоминает предшествующее направление перемещения по приходу казвдого информационного сигнала И; или П. рулевой выход триггера 24 подаЛючён к входу элемента И 22, а единичный выхрд к входу элемента И 23. На вторые входы этих элементов .поступают сигналы с выходов селекторов 14 и 15 соответственно. Таким образом, в случае предшествующего прямого направления триггер 24 разрешит прохождение последуницего сигнала с выхода селектора 15 - последовательность П П-, П через элемент И 29 и далее через элемент ИЛИ 21 на выход блока 1 декодирования и, наоборот, при предтествукщем обратном направлении триггер 24 разрешит прохождение последующего сигнала с выхода селектора 14 последовательИость П, Hj, IIj .через элемент И 22, элемент ИЛИ 20 на первый вьгход блока 7 декодирования,тем самым исключая потерю информационных импульсов при указанных видах реверса. . - Информационные сигналы, выработацные с учетом направления перемещения с первого и второго BUXOROB блока 11 декодирования поступают на информационные входы блока 1 сравнения. В соответствии с этим в блоке 1 сравнения изменяется информация о действительном положении (координате исполнительного органа и разность меаду заданным и действителышм положением (координатах). В зависимости от величины и 3Haiga этой разности на выходе блока 1 сравнения меняется сигнал, управляющий сервоусилителем и т.д. до тех пор, пока эта разность не станет равной нулю или будет находиться в заранее заданных пределах. Применение предлагаемого устройства позволило увеличить надежность и точность позиционирования в системе с числовым программным управлени11109112112 ем, исключать ошибки, возникающие при на величины скорости перемещения и произвольной частоте колебаний испол- частоты реверса исполнительного органительного органа, снять ограничения . на, упростить конструкщяо устройства.
j i
fe
i
J
- taj
i f
%
4 mil li 4 114111
($
s - M- i M - i
«14 4IIIII U||||
Hi «5
J
If hrtJ ГМ f f t f t I t
5 55 J : f 1 5 5
4 «. ,;. K,;.K ц.ч«ч
J.IIJlM III 14,4
I
V ч к У fe в a « &
ee
AiirTjJfiAi N Kl..iri.tt
M I iUiUMiiii
4i 4«.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 2947229, кл | |||
| Способ изготовления фасонных резцов для зуборезных фрез | 1921 |
|
SU318A1 |
| Пробочный кран | 1925 |
|
SU1960A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ НЕПРЕРЫВНОЙ МАГНИТНОЙ ТРАНСПОРТИРОВКИДЕТАЛЕЙ | 0 |
|
SU353979A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кинематографический аппарат | 1923 |
|
SU1970A1 |
