Преобразователь относится к устройствам автоматикии может быть использован для преобразования угла по ворота в число импульсов.j
Известен преобразователь угла поворота в код, содержащий магнитную систему, состоящую из цилиндрических зубчатых ротора, статора и магнита, причем число зубцов ротора и статора Q одинаково. При вращении ротора происходит модуля-ция магнитного потока
1.
Этот преобразователь имеет недостаточно-высокую точность, которая .за висит от количества зубцов, увеличение их числа технологически затруднительно и приводит к уменьшению степени модуляции потока, поэтому в подобных преобразователях конструктивные 20 особенности и технологические возможности изготовления не позволяют использовать их в высокоточных системах и устройствах.
Наиболее близким к изобретению 25 по технической сущности является магнитомодуляционныя датчик углового, перемещения, содержащий магнитную систему и магниточувствительный элемент, размещенный в зазоре между ротором и статором, на которых нанесены зубцы, причем магниточувствительный элемент вращается в зазоре вместе с входным валом 2.
В этом датчике токосъем с чувствительного элемента осуществляется через контактные вращающиеся кольца, что снижает надежность в условиях перегрузок, вибраций, а также при измерении климатических факторов - . температура, влажность и т.п. Количество импульсов, формируемых датчиком за один оборот вала, равно количеству зубцов-полюсов ротора и статора, что ограничивает точность датчика. Кроме того, необходимость размещать в зазоре подвижнь1й магниторезистор и элементы его крепления не позволяет получить высокую чувствительность датчика, что приводит к усложнению электронной части преобразователя .
Цель изобретения - повышение надежности и точности преобразователя.
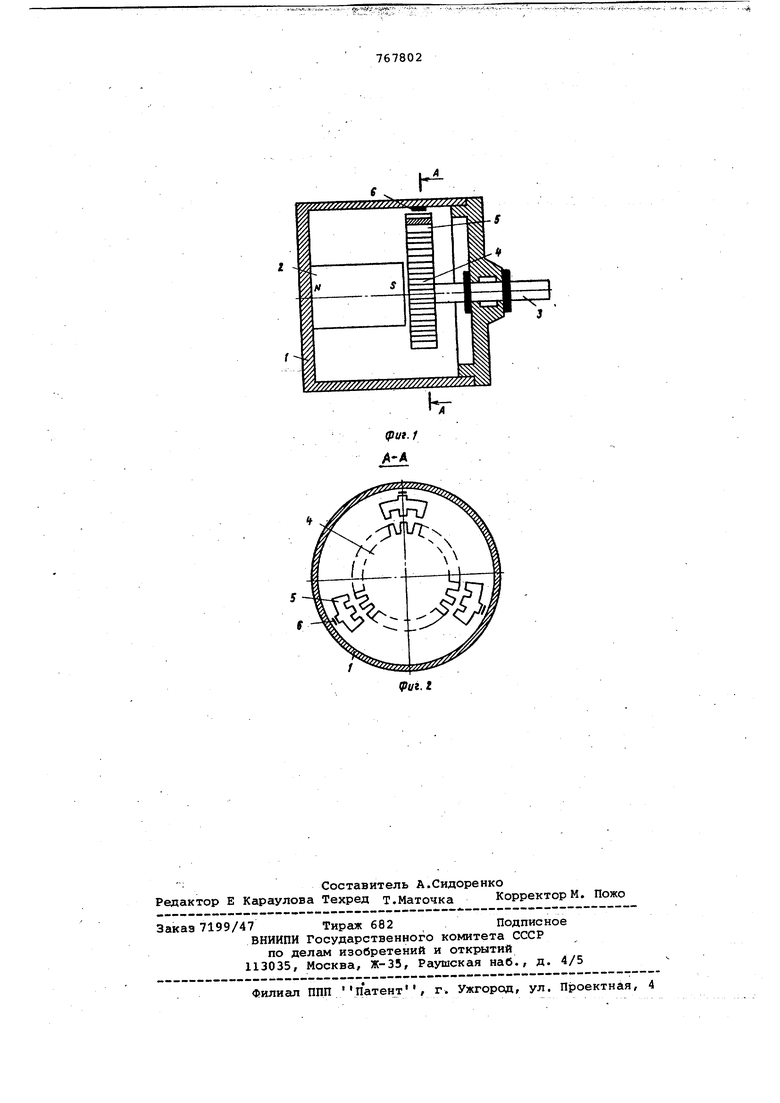
Цель достигается тем, что в магнитный преобразователь угла поворота вала в число импульсов, содержащий магниточувствит льные элементы и магнитную систему, состоящую из магнита зубчатого ротора и цилиндрического статора, введены зубчатые секторы, которые размещены между зубчатым рот ром и цилиндрическим статором и смещены друг относительно друга на вели чину, кратную дискретности обраЗователя, шаг зубцов секторов равен шагу зубцов ротора, а магниточувствительные элементы расположены в зазоре между зубчатыми секторами и цилиндри ческим статором. . На фиг. 1 схематически изображен преобразователь (для определенности показаны три сектора); на фиг. 2 сечение Д-А на фиг. 1. Магнитный преобразователь угла поворота вала в число импульсов состоит из цилиндрического статора (маг .нитопровода) 1 с укрепленным на нем магнитом 2. С выходной осью 3 жестко связан зубчатый ротор 4. Между стато ром 1 и ротором 4 расположены зубчатые секторы 5. в зазоре между секторами 5 и статором 1 укреплены магнит чувствительные элементы 6, например магнитодиоды или магниторезисторы. Секторы 5 смещены в нониусном соотно шении относительно зубцов ротора 4 н, угол Ч ., определяемый из выражения 4c (Tti), , где шаг зубцов ротора зв угловой мере; T - мрдуль нониусного сопряжения;1 - кoличeqтвo чувствительных Элементов. Величина fp/ti опреДеляет дискретйость нонкусного сопряжения, т.е. шаг зубца ротора делится на -и частей Модуль нониусного сопряжения у в дан ном случае показывает, сколько зубцо ротора охвачено углом смещения секто ров относительно друга. . Магнитный поток развиваемый магни том 2, замыкается через зубчатый ротор 4, сектора 5, магниточувстаитель аые элементы б и статор 1, Магнитное сопротивление всего трак та изменяется при вращении ротора 4. Например, магнитйое сопротивление дли потока, проходящего Ч:ерез верхний (фиг .2) сектор 5, наименьшее, так как зубцы ротора 4 находятся против зубцов сектора, при других положениях зуб-цов ротора сопротивление потоку растет. Таким образом происходит модуляция потока через магниточувстви тельные элементы б при . врахиении ротора 4 и входного вала 3. Смещение зубчатых секторов 5 в нониусном соотношений к зубцам ротора 4 обеспечивает смещение пиков модуляции потока, проходящего через каждый . из зубчатых секторов 5 и соответственно магниточувствительный элемент б. Это позволяет получить дискретность преобразования, меньшую, чем шаг зубцов ротора 4. Количество зубцов сектора 5 определяется конструктивно из условия обеспечения требуемой чувствительности, а шаг его зубцов равен шагу зубцов ротора 4. Введение зубчатых секторов в предлагаемую конструкцию позволяет вынести магниточувствительные элементы из переменного зубчатого зазора и установить их неподвижно, что позволяет повысить надежность преобразовате гтя.. Использование нескольких чувствительных элементов с секторами, смещенными относительно зубцов ротора, дает возможность увеличить, точность преобразования угла, так как дискретность при этом определяется количеством и взаимньлм смещением секторов, а не только шагом зубцов ротора. Увеличение точности и эксплуатационной надежности подобных преобразователей угла позволяет расширить г область их практического применения. Формула изобретения Магнитный преобразователь угла поворота вала в число импульсов, содержащий магниточувствительные элементы и магнитную систему, состоящую из магнита, зубчатого ротора и цилиндрического статора, отличающийся тем, что, с целью повышения надежности и точности, преобразователя, в него введены зубчатые секторы, которые размещены между зубчатым ротором и цилиндрическим статором и смещены друг относительно друга на величину, кратную дискретности преобразователя, шаг зубцов секторов равен шагу зубцов ротора, а магниточувствительные элементы расположены в зазоре между зубчатыми секторами и цилиндрическим статором. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 519750, кл. G 08 С 9/04, 1975. 2. Авторское свидетельство СССР № 342210, кл. G 08 С 9/04, 1971 (прототип) .,
фиг. f АА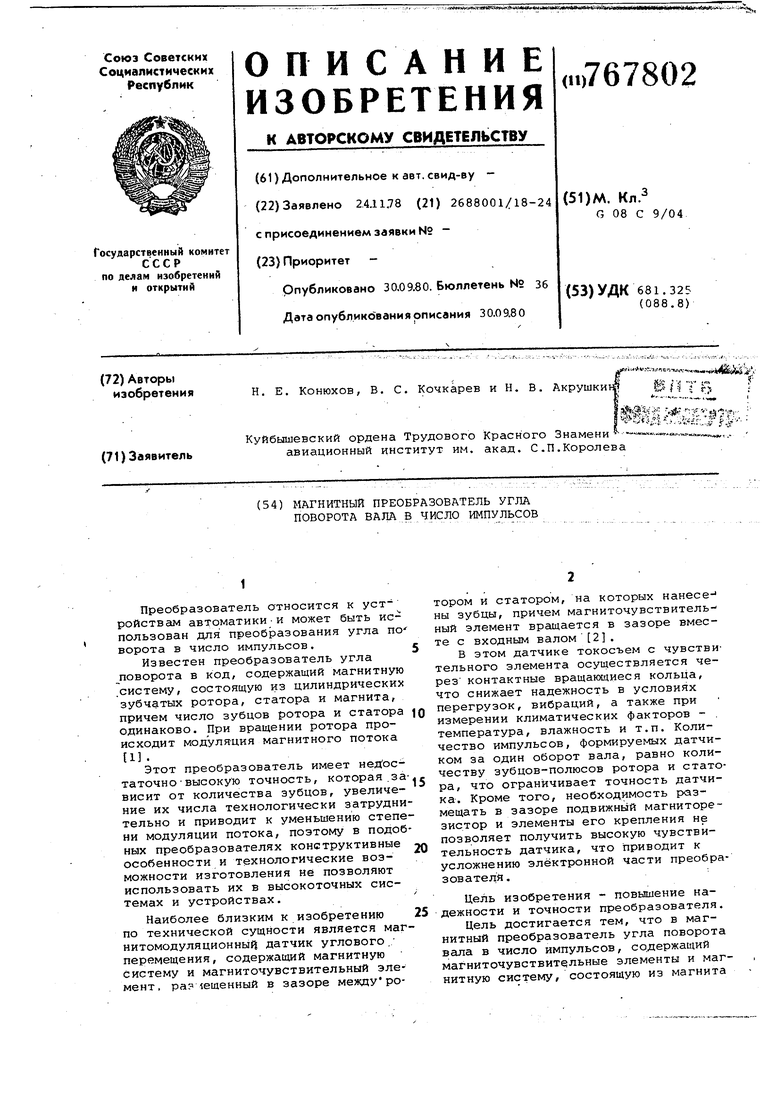
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик положения ротора биротативного вентильного электродвигателя | 1982 |
|
SU1035743A1 |
| Датчик угла поворота | 1989 |
|
SU1702170A1 |
| Преобразователь линейного перемещения в электрический сигнал | 1981 |
|
SU1012021A1 |
| Магнитная муфта | 1985 |
|
SU1354352A1 |
| Датчик угла поворота вала | 1979 |
|
SU773426A1 |
| Датчик угла поворота вала | 1985 |
|
SU1298526A1 |
| ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2110045C1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК СКОРОСТИ ВРАЩЕНИЯ И ПОЛОЖЕНИЯ РОТОРА | 2012 |
|
RU2488122C1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК СКОРОСТИ АВТОМОБИЛЯ | 2004 |
|
RU2270452C2 |
| ДАТЧИК ПОЛОЖЕНИЯ РОТОРА ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ | 2008 |
|
RU2357348C1 |