(54) УСТРОЙСТВО ДЛЯ КОНТРОЛЯ УГЛОВОГО: ПОЛОЖЕНИЯ КИСТИ Изобретение относится к медицинской технике, а именно к измерительным устройствам для исследования дви жений кисти руки человека. -: Известно устройство для контроля углового положения кисти, содержащее рукоятку, к торцу которой прикреплены два ортогональных упругих элемента с установленньпчй на них теизодатчиками, источник питания, тензоусилитель l . Однако, известное устройствЬ регистрирует лишь величину и направление приложение силы по двум ортогональный осям, перемещение кисти руки невозможно, сопротивление внешней среды остается постоянным и максимальньЕм, а число параметров положени кисти в пространстве ограничено. Целью изобретения является расширение функциональных возможностей, за счет обеспечения возможности измерения перемещения кисти руки в пространстве при переменных величинах сопротивлениях внешней среды. Поставленная цель достигается тем что в устройство, содержащее рукоятку, упругие элементы с тензодатчиками, тензоусилители, введены четыре прямоугольных бруска, четыре пружи- ны, прямоугольная рамка из прямоугольных элементов. Каждый из четырех прямоугольных брусков одним концом закреплен на основании, а другим через пружину соединен с углом прямоугольной рамки, верхний и нижний прямоугольные элементы которой являются упругими брусками с тензодатчиками. Два других упругих элемента укреплены торцами с одной стороны к торцам рукоятки, а с другой ортогонально к серединам верхнего и нижнего элементбв прямоугольной рамки. Тензодатчики упругих элементов соединены в мостовые схемы и подключены к источнику питания. На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2,3 то же, в проекциях; на фиг. 4-9 - схемы соединения тензодатчиков. Устройство для контроля углового положения кисти состоит из двух упругих брусков 1, 2, ортогональных друг, другу, которые присоединены к торцу рукоятки 3. Два других упругих бруска 4 и 5 ортогональны друг другу и попарно параллельны первым двум и укреплены ко второму торцу рукоятки 3. Упругие элементы выполнены в виде брусков прямоугольного сечения, двд
из которых 2 и 5 укреплены торцами к торцам рукоятки 3 и являются её продолжением, так что оси симметрии их сечения совпадают. Два других упругие бруска 1 и 4 прикреплены своими серединами к противоположным торцам двух упругих брусков 2 IJ 5, а концами-- кторцам брусков 6,7 и образуют с упругими брусками 2 и 5 рамку, углы которой соединены пойредстврм четырех пружин 8, 9, 10, 11 с концами четырех брусков 12, 13, 14, 15, другие концы которых соединены с основанием 16, причём последнее выполнено плоским. Тензодатчики 17-48 ycfaifOBhetiei по с ре дне Иллиний на каждой плоскости всех упругих брусков1, 2, 4, 5, причем, на брусках 2 и,5, связанных с рукояткой,по Два тёнзодатчика на каждой плоскости, а на двух других брусках 1 и 4 по одному из Каждой плоскости и с каждой стороны от .места соединения упругих брусков. Тензодатчики 17-32, расположенные на двух упругих брусках 2 и 5, связанных с рукоятью, соединены в четыре мостовые схемы, причем тензодатчиками 17(25) соединены одним концом с тензодатчиками 18(26), -расположенными н апротив первого на том же упруг ом бруске 5, а Другим концом с тензодатчиками 20(28), расположенными на противоположной плоскости другого упругого бруска 2, и образуют два моста, связанные с выводами сиг-, налов перемещения кисти вправо-влево, от себя - к себе. Т.енэрдатчики 21 (29) , расположенные на других плоскостях, соединеныОДНИМ концом с тензодатчиками 22(30), расположенными напротив него на ом же упругом бруске. 5, и другим концом - с тензодатчиками 23(31), расположенными на той же плоскости другого упругого бруска 2, и образуют два Jocтa соединенные с выходами .сигналов перемещения кисти руки пронация-супинация, отведение-приведение. Тензодатчики 33-48, располо-женные .на двух упругих брусках 1 и 4, соединены в две мостовые схемы, причем Тензодатчики 33(35), расположенные на горизонтальных плоскостях на одной половине одногоупругого бруска 4, соединены с тензодатчиками 34(36) , расположенными/на. том .же уп.ругрм бруске 4 на противодоложнрй плоскРсти напрртив, а.другим концом через последовательное соединение тенЗодатчиков 37, 40, 39, 33,.один из которых расположен на той же стороне иплоскости второго упругого бруска 1 другой - на противоположной стороне и плоскости первого упругого бруска 4, и образую.т мост, соединенный с выходами сигналов перемещения кисти вверх-вниз, а Тензодатчики 41(44), расположенные на вертикальных плоскостях на одной полРвйне оДнРго уп pvroro бруска 4, соединены с тензодатчиками 42(43),расположенными на том же упругом бруске 4 на противоуюложной плоскости напротив,а другим концом - через последовательное соединение тензодатчиков 45, 47, 48, 46,. один из которых расположен на |гой же сторрне и плоскости второго . упругого бруска 1, другой - на противоположной стороне и той же плоскости второго упругого 1 со вторым концом тензодатчиков 43(42), расположенных на противоположной сторрне и той же плоскости первого упругого бруска 4, и образуют мост, соединенный с выходами сигналов перемещения кисти сгибание-разгибание (скручивание).
Устройство работает следующим образом.
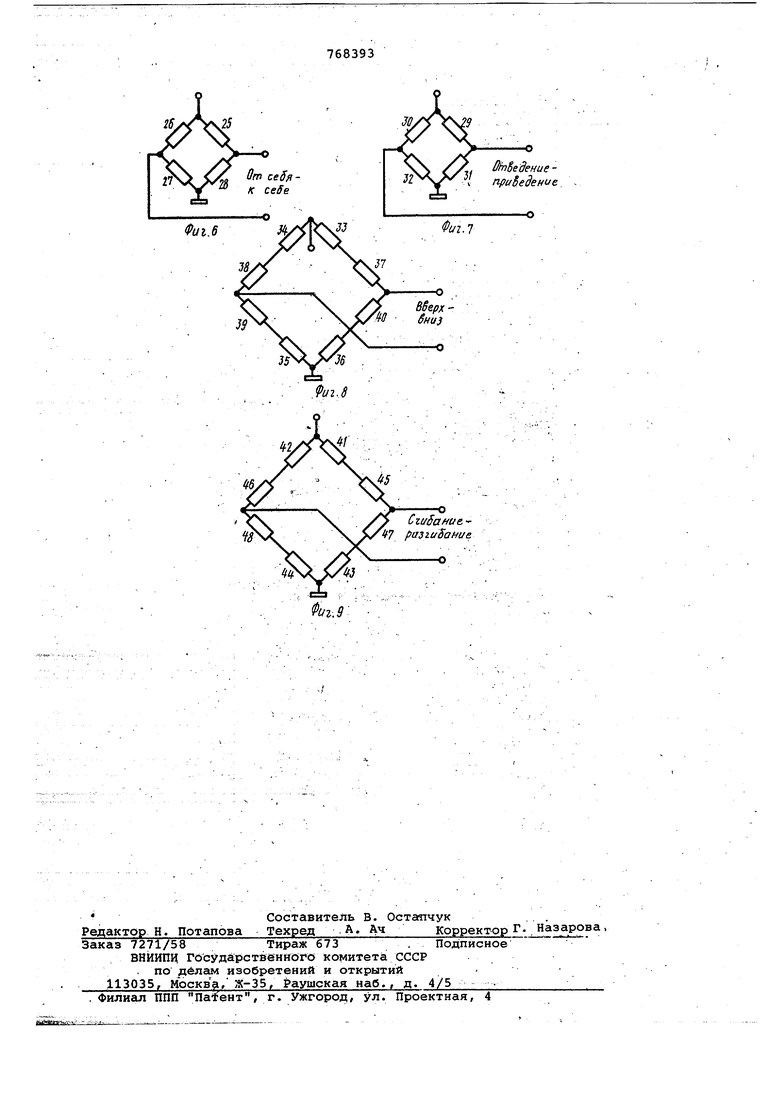
Испытуемый берется за рукоятку 3. При перемещении рукоятки 3по какомулибо направлению в пространстве вверхвниз, вправо-влево, от себя - к себе или перемещении, соответствующему повороту кисти руки вокруг какого-либо из этих направлений сгибания-разгибания, отведения-приведения, супинациипронации, в упругих элементах возникают деформации, которые регистрируются .полупроводниковыми тензодатчиками и трансформируются в электрические ригналы. Тензодатчики соединены в мостовые схемы, как. показано на фиг. 4-9, одна из диагоналей морта подключена к истрчнику питания, а .со второй диагонали снимается полезный сигнал, соответствующий пёремещен-ию кисти руки по данному направлению. Например, при перемещении кисти фуки вертикально вверх деформации, возникают во всех упругих брусках, но разбаланс моста проис.ходит только у канала регистрации перемещения вверх-зниз (тензодатчики 33-40, расположенные на горизонтальных плоскостях упругих брусков i и 4).Деформации, возникающие в других брусках 2 и 5, связанные с рукоятью, не на.рушают разбаланса мостов, собранных на укрепленных на этих брусках тензодатчиках 17-32 и регистрирующих перемещения кисти руки в горизонтальной .плоскости, так как перемещение рукоятки 3 вверх вызывает деформации сжатия в верхнем бруске 5 и растяжения в нижнем 2, что приводит к изменению величины сопротивлений одного знака у тензодатчиков 17, 18, 21, 22, 25, 26, 29, 30 и противоположного знака у теызрдатчиков 19, 20., 23, 24, 27, 28, 31, 32, поэтому.разбаланса мортов., составленных из этих тензодатчиков 17-20, 21-24, 25-28,. 29-32,vHe происходит. Аналогичные компенсациипроисходят в других ка- налах при перемещений-рукоятки, в одном из направлений. Перемещение рукоятки одновременно по нескольким. сте.пеням свободы вызовет разбалансы соотйетствуЕощкх мостов, пропорциональных величине перемещения в данно направлении. При изменении типа пружин 8, 9, 10, 11.и их жесткости буде меняться величина усилий, необходимы для перемещения рукоятки 3 в пространстве, т.е. будет ме няться сопротивление внешней среды. При этом величины сигналрв, снимаемых с тензометрических мостов, будут также меняться, однако,,такие изменения можно компенсировать изменением коэффициента усиления усилителей, которые подключаются к тензометрическим мостам, или изменением величины напряжения, питающего тензометрические мосты. Для определения соотношения степени перемещения рукоятки 3 в пространстве и величин электрических сигналов, снимаемых с тензометрических мостов, производится тарировка устройства обычным способом.
Устройство позволяет регистрировать положение кисти руки в пространстве или усилия, развиваемые рукой, по шести степеням свободы, три из которых соответствуют перемещению кисти вверх-вниз, вправо-влево, от себя - к себе, а три других соответствуют угловым вращениям кисти приведение-отведение, сгибание-разгибание., пронация-супинация. При этом возможно изменять величину.вяешней нагрузки на руку путем изменения жесткости пружин, устанавливаемых в устройство.
Формула изобретения
Устройство для контроля углового положения кисти, содержащее рукоятку, к торцу которой прикреплены два ортогонайьных упругих- элемента с установленными на них тензодатчиками, источник питания, тензоусилители, от личающееся тем, что, с целью расширения функциональных возможностей за счет обеспечения возможности измерения перемещения кисти руки в пространстве при переменных величинах сопротивления внешней среды, в него введены четыре прямоугольных бруска, четыре пружины, прямоугольная рамка из прямоугольных элементов, при этом каждый из четырех прямоугольных брусков одним концом закреплен на основании, а другим через пружину соединен с углом прямоугольной рамки, верхний и нижний прямоугольные эле- . менты которой являются упругими брусками с тензодатчиками, два других упругих элемента укреплены торцами с одной стороны к торцам руко.ятки,а с ДРУГОЙ - ортогонально к серединам верхнего и нижнего элементов прямоугольной рамки, причем тензодатчики упругих элементов соединены в мостовые схемы и подключены к источ.нику питания.
Источники информации, принятые во внимание при экспертизе
1. Патент США № 344776б, .кл. 244-83, опублик. 1969.
-12
1Ц 33 « 25 Jf л/:-; Л ) I J. /

| название | год | авторы | номер документа |
|---|---|---|---|
| Изометрическая задающая система | 1980 |
|
SU920644A1 |
| Очувствленный захват манипулятора | 1981 |
|
SU986775A1 |
| Тензометрический кистевой динамометр | 1988 |
|
SU1706651A1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| СИЛОИЗМЕРИТЕЛЬНЫЙ КАТЕТЕР С ПРИСОЕДИНЕННОЙ ЦЕНТРАЛЬНОЙ РАСПОРКОЙ | 2009 |
|
RU2506965C2 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛЫ МЫШЦ РАЗГИБАТЕЛЕЙ И СГИБАТЕЛЕЙ НИЖНЕЙ КОНЕЧНОСТИ | 2009 |
|
RU2423074C2 |
| Устройство для определения мышечной силовой активности | 1989 |
|
SU1816431A1 |
| Гальванометрический усилитель | 1961 |
|
SU143144A1 |
| Устройство для исследования микромеханических свойств материалов | 1989 |
|
SU1758499A1 |


у 1 17 10
W
ИУУЧ j 1 : i ЛЛЛ1
. «г,р 1 5
5
13 х
9
И1.3
18
flpffeo- .
аг.
