(Sk) ИЗОМЕТРИЧЕСКАЯ ЗАДАЮЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля углового положения кисти | 1978 |
|
SU768393A1 |
| Очувствленный захват манипулятора | 1981 |
|
SU986775A1 |
| Устройство управления | 1990 |
|
SU1795437A1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Задающее устройство для управления манипулятором | 1988 |
|
SU1579772A1 |
| СТАБИЛОГРАФ | 1991 |
|
RU2020869C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Устройство измерения коэффициента сцепления колес с аэродромным покрытием | 2015 |
|
RU2612074C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ЗАТЯЖКИ РЕЗЬБОВЫХ СОЕДИНЕНИЙ | 1971 |
|
SU427251A1 |
| Стенд для измерения статических и динамических характеристик инструмента в процессе механической обработки | 1981 |
|
SU975333A1 |
I
Изобретение относится к работотехнике, а именно к системам регулирования пространственным положением объекта и может применяться в качестве органа ручного управления для одновременного регулирования шести параметров.
Известно многостепенное изометг рическое задающее устройство, содержащее рукоятку, торец которой соединен с ортогональными упругими, стержнями, один из которых соединен через диафрагму с основанием, а другой - подшипником скольжения с тем же основанием. На упругих стержнях установлены тезнодатчики. Устройство регистрирует усилия руки по нескольким направлениям в пространстве и преобразует их в электрические сигналы управления 1 .Однако конструкция данного устройства является сложной, трение в подшипниках скольжения создает нелинейность характеристик, что ухудшает точность управления. Величина сигнала на выходе также зависит от места приложения усилия к рукоятке.
Известно задающее устройство, содержащее два упругих элемента, ортогональных друг другу, которые присоединены с одной стороны к торцу рукоятки, а с другой - к основанию. На упругих элементах установлены тензодатчики, соединенные в мостовые схемы и связанные с источником питания и выходами устройства. Усилие руки, прикладываемые к рукоятке по двум ортогональным направлениям преобразуются в сигналы управления 2 .
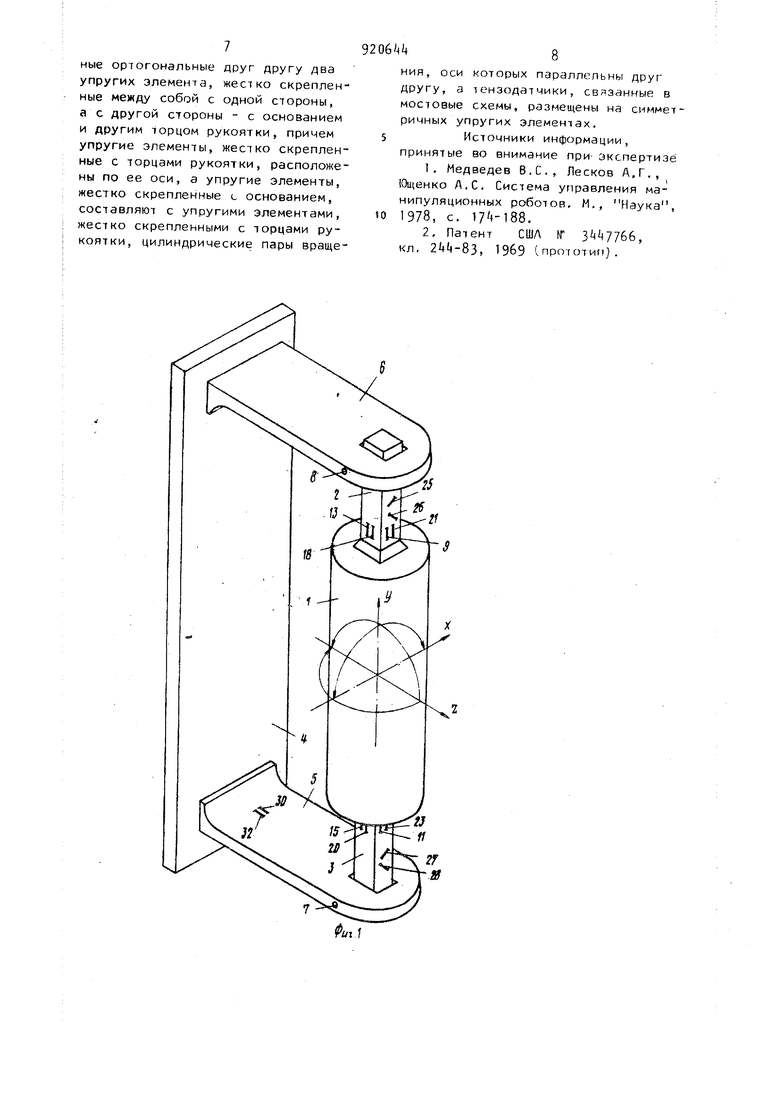
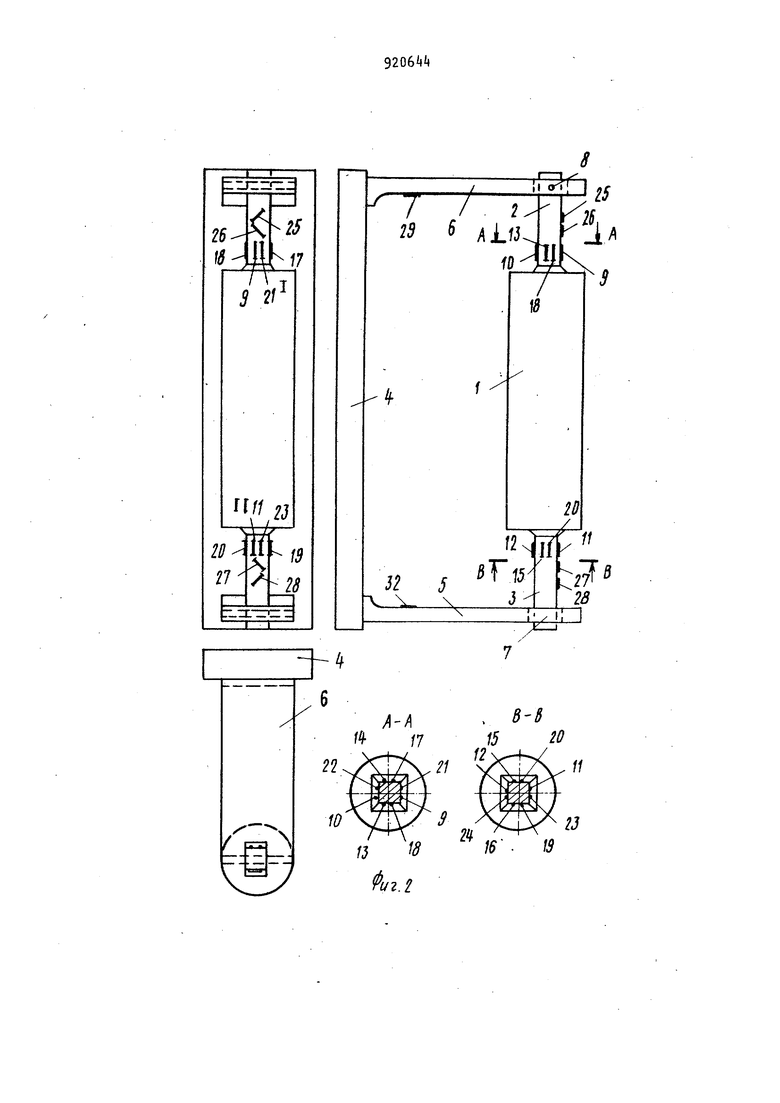
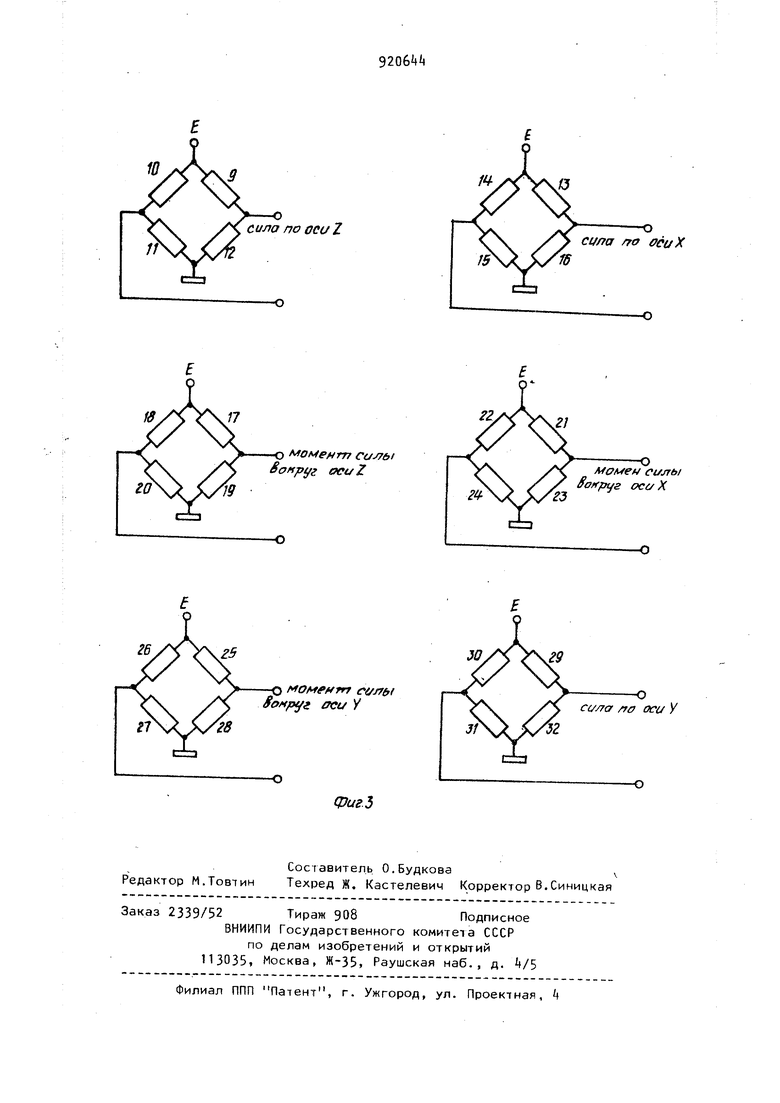
Однако в таком устройстве число одновременно контролируемых параметров ограничено, кроме того, усилия измеряются неточно, так как величины сигналов на выходах тензомостов Зависят от места приложения усилий к рукоятке. Целью изобретения является расширение функциональных возможностей за счет увеличения числа одновременно измеряемых параметров, а также повышение томности измерения усилий руки место приложения которых меняется в ограниченной области по рукоятке. Такое устройство необходимо для одновременного управления объектом в пространстве по шести степеням свободы, три из которых соответствуют местоположению объекта, а три других - его ориентации. Поставленная цель достигается тем, что в изометрической задающей системе, содержащего ортогональные друг другу два упругих элемента, скрепленные между собой, основание скрепленное с одним из упругих элементов, рукоятку скрепленную одним на торце с другим упругим элементом, и тензодатчики, установленные на упругих элементах и связанные в мостовые схемы, подключенные к источнику питания и выходам системы, в ней установленыдополнительные ортогональные друг другу два упругих элемента, жестко скрепленные между собой с одной стороны, а с другой стороны - с основанием и другим торцом рукоятки, причем упругие элементы, жестко скрепленные с торцами рукоятки, расположены по ее оси, а упругие элементы, жестко скрепленные с основанием, составляю с упругими элементами, жестко скре ленные с торцами рукоятки, цилиндр ческие пары вращения, оси которых параллельны друг другу, а тензодат чики, связанные а мостовые схемы размещены на симметричных упругих элементах. Такая конструкция проста в изготовлении и позволяет точно и одновременно регистрировать усилия и моменты руки человека по шести сте пеням свободы и использовать их дл адекватного управления объектом в пространстве. На фиг.1 приведена схема задающ системы; на фиг.2 - изображение си темы в прямоугольных проекциях; на фиг.З схемы совпадения тензодатч ков. Изометрическая задающая система содержит pyKOHTijy 1 , к торцам которой жестко присоединены упругие 44 элементы 2 и 3. являющиеся ее продолжением, основание k, к которому торцами жестко присоединены два упругих элемента 5 и 6 и два штифта 7 и 8, соединяющие концы упругих элементов 2 и 6, 3 и 5. Тензодатчики 9-32, составЬяющие мостовые схемы, разнесены на симметричные упругие элементы 2 и 3 5 и 6, укрепленные на противоположные-торцы рукоятки 1. Тензодатчики 9 - 2, расположенные на упругих элементах 2 и 3 жестко соединенных с рукояткой 1 , соединены в четыре .мостовые схемы, причем один тензодатчик 8 (11, 13 и 15) соединен одним концом с тензодатчиком 10 (12, 1 и 16), расположенным на противоположной стороне того- же упругого бруска 2 (3, а., другим концом - с тензодат чиком 12 СТО, 16,1 it), расположенным на протиповоложной стороне другого упругого элемента 3 (2) и образуют два моста 9 - 12, 13 - 16, регистрирующие усилия в направлениях 2 и X, перпендикулярном и параллельном плоскости основания и ортогональных продольной оси Ч рукоятки. Другой, соседний тензодатчик 17 (21, 20 и , , соединен одним концом с тензодатчиком 18 (22, 19 и 23/ , располо ; енным на протиооположной стороне того же упругого элемента 2 ( 3), а вторым концом с тензодатчиком 19(23, 18 и 22), расположенным с той же стороны другого упругого элемента (2), и образуют два моста 17-20, 21 - 2, регистрирующие моменты вращения вокруг выше упомянутых направлений X и Z . Тензодатчики 25 - 28, расположенные под углом в у к продольной оси рукоятки, соединены в мостовую схему, регистрирующую момент вращения вокруг продольной оси . Тензодатчики 29 - 32, расположенные на внутренних плоскостях других упругих элементов 5 и 6, соединены в мостовую схему, регистрирующую силы в направлении продольной оси рукоятки. Система работает следующим образом. При приложении сил и моментов к рукоятке 1 в упругих элементах 2-, 3, 5 и 6 возникают деформации, которые преобразуются тензодатчиками в электрические сигналы. И на выходах тензометримеских мостов появгиштся сигналы, пропорциональные проекциям сил на оси координат ус( роиства X, Ч , Z и проекциям моментов вокруг соответствующих осей. Например, при приложении силы а на правлении продольной оси рукоятки деформации возникают во всех упругих элементах 2, 3. 5 и 6, Однако наибольшие деформации будут в элементах 5 и 6, так как приложенная сила вызывает их изгиб. Деформации других упругих элементов 2 и 3 зна чительно меньше, так как приложенная сила вызывает растяжение одного и сжатие другого. Кроме того, так как половины тензометримеских мостов 9 - 12, 13 .- 16, 17 - 20, 21 - 2, 25 - 28 расположены на уп ругих элементах 2 и 3 с протйвоположным знаком деформации, поэтому, при одинаковых величинах сопротивлении тензодатчиков, происходят взаимные компенсации и на выходах этих мостов сигналы отсутствуют. Таким образом, вертикально направленные силы вызывают лишь, разбалан одного тензометрического моста 23 Аналогичные компенсации происходят и при действии сил по другим напра лениям. Если направление силы отли чается от направления осей координат устройства, то на выходах тензомет рических мостов 13 - 16,29-3 и 9 - 12 появятся сигналы, пропорциональные проекциям силы на соответствующие оси координат устройст ва X,У , 2 . Небольшие смещения руки вдоль рукоятки 1, т.е. смещение места приложения силы, вызывают уве личение деформации, например, в вер нем упругом элементе 2, но при этом в нижнем упругом элементе 3 деформа ция пропорционально уменьшится. Та,ким образом, при постоянной силе смещение места приложения ее вдоль :рукоятки не изменит величину сигнала на выходе устройства. Подобные компенсации происходят и при разделении действия сил и моментов в раз личных направлениях. Изометрическая задающая система позволяет точно и одновременно регистрировать силы и моменты руки человека в пространстве по шести ст пеням свободы, без взаимных влияний друг на друга. Три степени свободы соответсIвуют трем координатам пространство v, ,2, а три других вращению кисти руки вокруг каждой ИЗ них. в то время как известная система регистрирует лишь ограниченное число направлений. Кроме того, передаточные характеристики систе-° мы линейны, так как перемещения элементов практически отсутствуют в связи их жестким связям.. Система может также измерять усилия руки, место приложения которых меняется в ограниченной области вдоль рукоятки, что повышает точность регистрации сигналов управления. Дополнительным преимуществом является также простота конструкции, не требующая для изготовления сложных техн|)логических операций, и малые габариты, что позволяет использовать устройство при ограничениях рабочего пространства оператора. Известные же шестистепенные задающие устройства конструктивно сложны и трудоемки в изготовлении. Устройство может быть использовано в качестве органа ручного управления для регулирования пространственным положением объекта одновременно по шести степеням свободы, например, в полуавтоматических режимах управления местоположением и ориентацией захвата манипулятора. Использование устройства для управления по вектору силы,захватом манипулятора, при выполнении операции с кинематически связанными объектами или в случае преодоления неизвестных внешних сил, позволяет оператору дополнительно ощущать величину и и направление усилия, развиваемого захватом. Формула изобретения Изометрическая задающая система, содержащая ортогональные друг другу два упругих элемента, скрепленные между собой, основание, скрепленное с одним из упругих элементов, рукоятку, скрепленную на торце с другим упругим элементом, и тензодатчики, установленные нл упругих, элементах и связанные в мостовые схемы, подключенные к источнику питания и выходам системы, отличающаяся тем, что, с целью расширения функциональных возможностей и повышения тоинпсти систеы, в ней установлены дспо/ нитсль- 7 ные ортогональные друг другу два упругих элемента, жестко скрепленные между собой с одной стороны, ас другой стороны - с основанием и другим торцом рукоятки, причем упругие элементы, жестко скрепленные с торцами рукоятки, расположены по ее оси, а упругие элементы, жестко скрепленные L основанием, составляют с упругими элементами, жестко скрепленными с торцами рукоятки, цилиндрические пары враще/4НИН, оси которых параллельны друг другу, а тензодатчики, связанные в мостовые схемы, размещены на симметричных упругих элементах. Источники информации, принятые во внимание при- экспертизе 1.Медведев B.C., Лесков А. Г. , 0ц(енко Л. С. Система управления манипуляционных роботов, М., Наука, 1978, с. 174-188. 2.Патент США N (77б6, кл, , 1969 (прототиг).
10
сила no ос и 2
Шci/fra rro ffctfX
Cl/jrb/
foxfK/г oca X
