(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2758377C1 |
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| ПРОСТРАНСТВЕННО-ПЛОСКИЙ ПЛАТФОРМЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2781602C1 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МАНИПУЛЯТОР-ТРИПОД | 2023 |
|
RU2824543C1 |
| МАНИПУЛЯТОР-ТРИПОД С ШЕСТЬЮ СТЕПЕНЯМИ ПОДВИЖНОСТИ | 2008 |
|
RU2403144C2 |
| МАНИПУЛЯТОР-ТРИПОД С ШЕСТЬЮ СТЕПЕНЯМИ ПОДВИЖНОСТИ | 2008 |
|
RU2403143C2 |
| СКЛАДЫВАЮЩИЙСЯ ШАРНИРНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2765030C1 |
| ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ СКЛАДЫВАЮЩИЙСЯ МАНИПУЛЯТОР | 2021 |
|
RU2759552C1 |
| ШАРНИРНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2751782C1 |
Изобретение относится к пространственным стержневым Механизмам, в частности к манипуляторам.
Известен манипулятор, имеющий основание и рабочий орган, шарннрно связанные телесколичеоки,ми стержнями, соединенными между сОбой пространственным 1. па раллелог,раМмами 1,1.
(Конст.рукщия этого манипулятора является сложной: рабочий орган связан с рснованием большим чи;сл ом стержней и шар.ниров, имеются поступательные пары - телескопические стержни. Кинематическая схема манипулятора представляет механизм с высоким числом избыточных связей, т. е. механизм, чувствительный к погрешностям изготовления и сборки.
Целью изобретения - упрош,ение конструкции при одновременном обеспечении заданного пространственного движения рабочего органа относительно 0:снования.
Для достижения этого шарниры выполнены Д.ВОЙ.НЫ.МИ со скрешивающимися осями вращения, причем упомянутые оси по крайней-мере одной из кинематических цепей смещены в пространстве относительно осей других кинематических цепей, причем скрещивающиеся оси вращения в двойных шарнирах образуют пря1мой угол.
Оси одноименных шарниров .различных кинематических цепей в основании и у рабочего органа соответственнообразуют
прямой угол, а соединение основания и рабочего органа выполнено тремя кинематическими цепями, элементы которых имеют равную длину, причем расположение и ориентация осей вращения шарниров в оснОВании и -в рабочем органе одинаковы.
10 Кроме того, оси вращения двойных шарниров, .связывающих две кинематические цепи с основанием или с рабочим органом, совпадают, причем двойные шарниры основания или рабочего органа объединены в один общий узел, выполненный как единый вал, а .оси вращенйя в Двойных шарнирах выполнены пересекающимися.
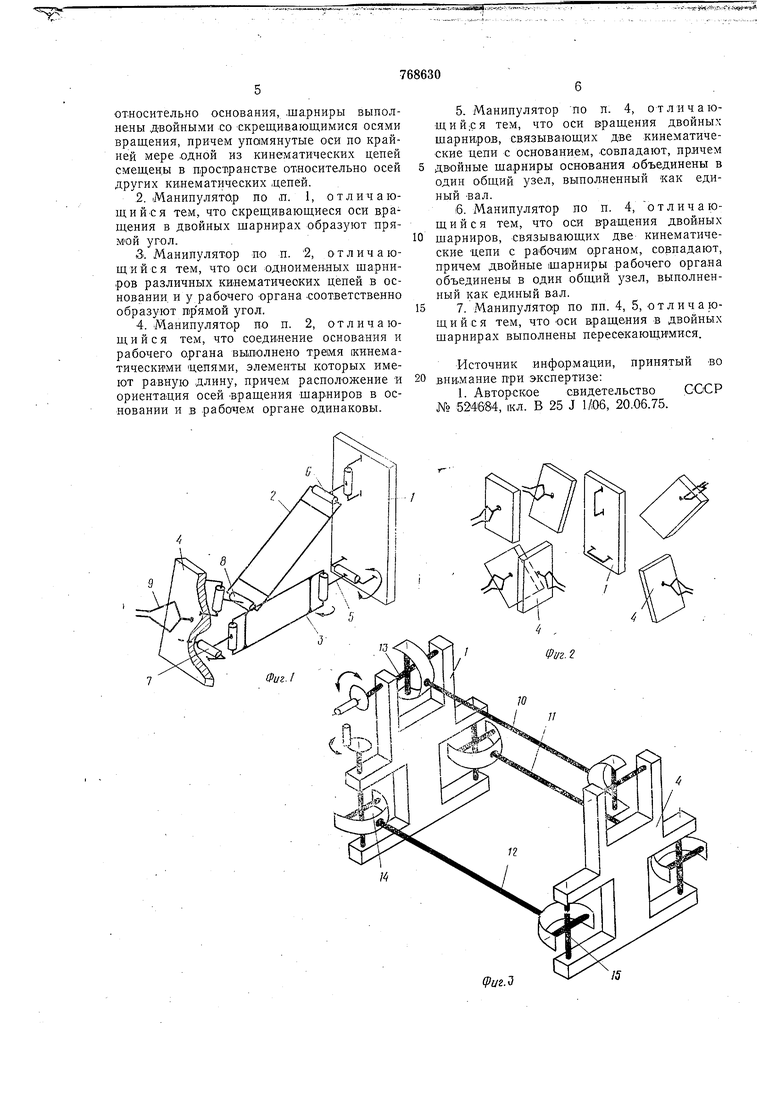
На фиг. 1 показан манипулятор с двумя кинематическими цепями, ра бочий орган
20 которого выполняет заданное йрШтраНственное движение; на фиг. 2 - некоторые возможные положения рабочего органа относительно рснования для этого манипулятора (связывающие кинематические цепи
25 условно не показаны); на фиг. 3 - схема
манипулятора стремя кинематическими цеПЯМИ равной длины, рабочий орган .которо го сохраняет неизменную ариента1цию в
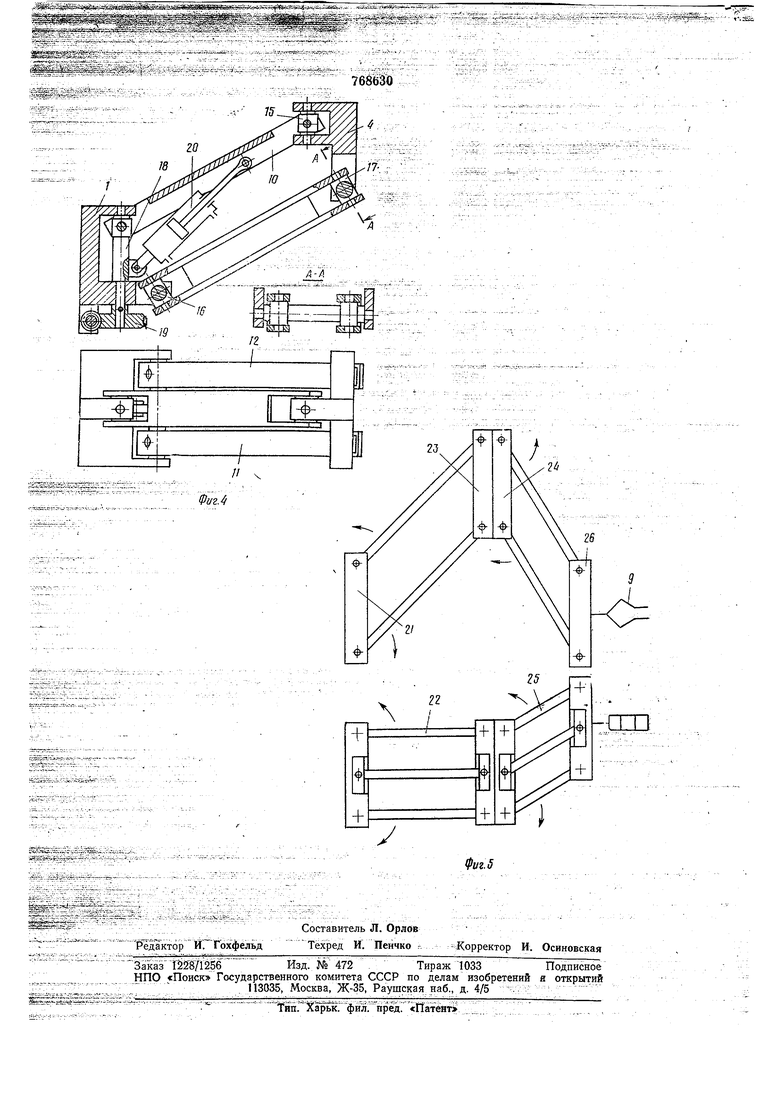
пространстве; на фиг. 4 - общий вид мани38 пулятора с тре1мя кинематическими цепями, две из которых имеют общие шарниры; на фиг. 6 - последовательное соединение двух модулей (манипуляторов), образующих манипулятор, перемещающий рабочий орган по трем координатам с сохранением его постоянной ориентадии.
Манипулятор (см. фиг. 1) имеет основание 1, соединенное стержнями 2 и с рабочим органом 4. Стержни и 5 соединены с основанием 1 двойными .шарнврами 5 и 6, а с рабочим органом 4 - двойными шарнира.ми i7 и 5 соответственно. Стержень 2 с двойными ша.р.нирами 6 и 8 является первой, а стержень 3 с двойными шарнирами 5 и 7 - второй кине.матическими цепями. Рабочий орган оснащен схватом 9. .Привод манипулятора осуществляется, например, с помощью управления вращением по двум осям .в двойном шарнире 5.
Манипулятор работает следующим образом.
(При вращении двух управляемых осей двойного шарнира 5 рабочий орган 4 под .воздействием кинематических цепей перемещается в пространстве, занимая положение, определяемое углами поворота осей (управляющими параметрами) в двойном шарнире 5. При этих перемещениях рабочего органа его ориентация в каждой точке пространства является определенной (см. фиг. 2) для KOHKipefnoro соотношения конструктивных параметров .механиЗМа и зави-. сит от двух текущих управляющих параметров..-...,.,-, ., .... ,..-. Манищ лятор, изображенный на фиг. 3, состоит из основания 1 и рабочего органа 4, связанных тремя кинематическими цепя;ми, имеющими одинаковз ю конфигурацию. Цепи состоят из стержней 10-/2 равной дли-ны. Стержни соединены шарнирами с пересекающимися осями вращения с основанием и рабочим органом, имеющими одинаковую форму и размеры. При этом двойные шарниры 1/|5 и 14 являются управляемыми, а остальные двойные .шар.ниры 15 выполняют .пассивную роль.
Манипулятор работает следующим образом.
При вращении управляемых осей двойных шарниров 13 и 14 рабочий орган 4 перемещается в прост:ранстве по двум независимьш координатам, оставаясь параллелен са.м себе, т. е. сохраняя ориентацию относительно основания / постоянной.
Манипулятор на фиг. 4 также имеет основание J и рабочий орган 4, соединенные стержнями .10-1/2 одинаковой длины. Причем стержни // и 12 соединяются с основанием одниМ общим шарниром 16, а .с ра-бочим органом - таким же ша:рниро,м 17. Шарнир .18 является управляемым. Например, вращение вокруг одной оси (верти-кальной) .производит червячная передача 19, а вращение QKpyr другой оси (горизонтальной)- гидро- или пневмопривод 20,
Манипулятор работает аналогично изображенному на фиг.З - при перемещении рабочего органа его ориентация сохраняется.
На фиг. 5 дано последовательное соединение двух, модулей. Каждый модуль представлябт собой -манипулятор, аналогичный изображенно,му на фиг. 3 или 4. Первый модуль состоит из неподвижного основания
21, шарнирно соединенного стержня;мн 22 с рабочим органом 23, К которому прикреплено основание 34 второго модуля. Основание 24 шарнирно соединено стержнем 25 с рабочим органом 26, оборудованным схватом 9.
Работает манипулятор, состоящий из двух .модулей, следуюшим образам.
В каждом из .модулей рабочий . орган перемещается в зависимости от двух управляющих параметров, сохраняя постоянную ориентацию относительно основания. Основание 24 второго -модуля перемещается -вместе с рабочим органом 23 первого .модуля. Таким. образо.м, рабочий орган 26 пере.мещается -в зависимости от четырех управляющих параметров, что позволяет позиционировать схват 9 в трехмерном .пространстве по трем независимым координатам, со.храняя его ориентацию постоянной.
Предлагаемый манипулятор (см. фиг. 1) может применяться для перемещения из одной точки в другую (или другие) объектов с о.дновременной их переориентацией по жесткой программе, например, в автоматических линиях.
Манипулятор (ам. фиг. 5) из двух последовательно соединенных модулей, обеспечивающий сохранение ориентации рабочего органа :при его перемещениях, имеет дополнительную - четвертую степень подвижности, что повыщает его .маневренность. Такой манипулятор с простой системой управления может быть использован, например, для укладки объектов на стеллажи, щтабелирования кирпичей и т. п. Манипулятор обладает повышеиной жесткостью, обусловленной наличием параллельных связей между основанием и рабочим о.ргано1м, о-бразующиМ ферму. Манипулятор имеет высокие показатели технологичности: большой коэффициент повторяемости деталей (шарниры .и стержни), .возможность широкой унифи1кации узлов и целых модулей.
Формула изобретения
il. Манипулятор, содержащий основание и .рабочий орган, соединенные не менее, чем двумя кинаматическими,цепями, выпол.неняьгми в виде стержней, .шарнирно связанных с основанием и с .рабочим органом, а также привод, отличающийся тем, что, с щелью зшрощення колструщии при одновременном обеспечивании заданного пространственного движения рабочего органа
относительно основания, .шарниры выполнены двойными со Скрещивающимися осями вращения, причем упомянутые оси по крайней мере одной из кинематических цепей смещен,ы в пространстве относительно осей других кинематических деней.
Источник информации, принятый во 20 вни.мание при экспертизе:
Фаг. 4
/
2
hCED:
+ -itvXr. J SS-ft-: ;-:--- t,::
