Изобретение относится к машиностроению, и в частности к платформенным механизмам параллельной структуры, и может найти применение в автоматических линиях, обрабатывающих центрах и роботах-манипуляторах.
Известен платформенный манипулятор, содержащий опорное основание и кинематически связанную с ним подвижную платформу рабочего органа и выполненный с приводом от 6 двигателей через 12 сферических шарниров (книга Вульфсон И.И. и др. «Механика машин», Москва: Высшая школа, 1996, с. 28, рис. 1.20) - аналог.
Недостатками известного платформенного манипулятора являются сложность конструкции и системы управления одновременно всеми шестью приводными двигателями.
Наиболее близким к предлагаемому изобретению является платформенный манипулятор, содержащий опорное основание, кинематически связанно через шарнирно-рычажное устройство со сферическими шарнирами и тремя приводными вращательными двигателями с подвижной платформой с закрепленным на ней рабочим органом (статья Мирзаев Р.А. и др. «Исследование кинематики манипулятора параллельной структуры» (дельта-механизм)» // Вестник Сибирского госуд. аэрокосм. ун-та, 2012, Вып. 4, стр. 46-50, рис. 1 и рис. 4) – прототип с числом степеней свободы W = 3.
Недостатками указанного платформенного манипулятора являются сложность конструкции (из-за применения сложных в изготовлении и сборке сферических шарниров), сложная система управления жестко закрепленными на подвижной платформе рабочим органом (из-за связанной кинематики движения такого рабочего органа), а также ограниченное до нуля конусообразное рабочее пространство (представленное на рис. 4 в упомянутой статье Мирзаева Р.А. и др.).
Решаемая техническая задача заключается в упрощении конструкции и расширении рабочего пространства манипулятора за счет подвижной установки рабочего органа на перемещаемой платформе через простые цилиндрические шарниры, а также за счет увеличения числа степеней свободы манипулятора с реализацией раздельной кинематики движений его приводов.
Получение технического результата достигается за счет того, что подвижная платформа манипулятора связана с опорным основанием посредством замкнутой кинематической цепи рычажных звеньев, содержащей цилиндрические шарниры с пересекающимися между собой осями углового поворота и установленной в сочетании с кинематической связью рабочего органа с подвижной платформой, выполненной в виде замкнутой кинематической цепи рычажных звеньев, содержащей цилиндрические шарниры с параллельными между собой осями углового поворота.
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2 и фиг. 3.
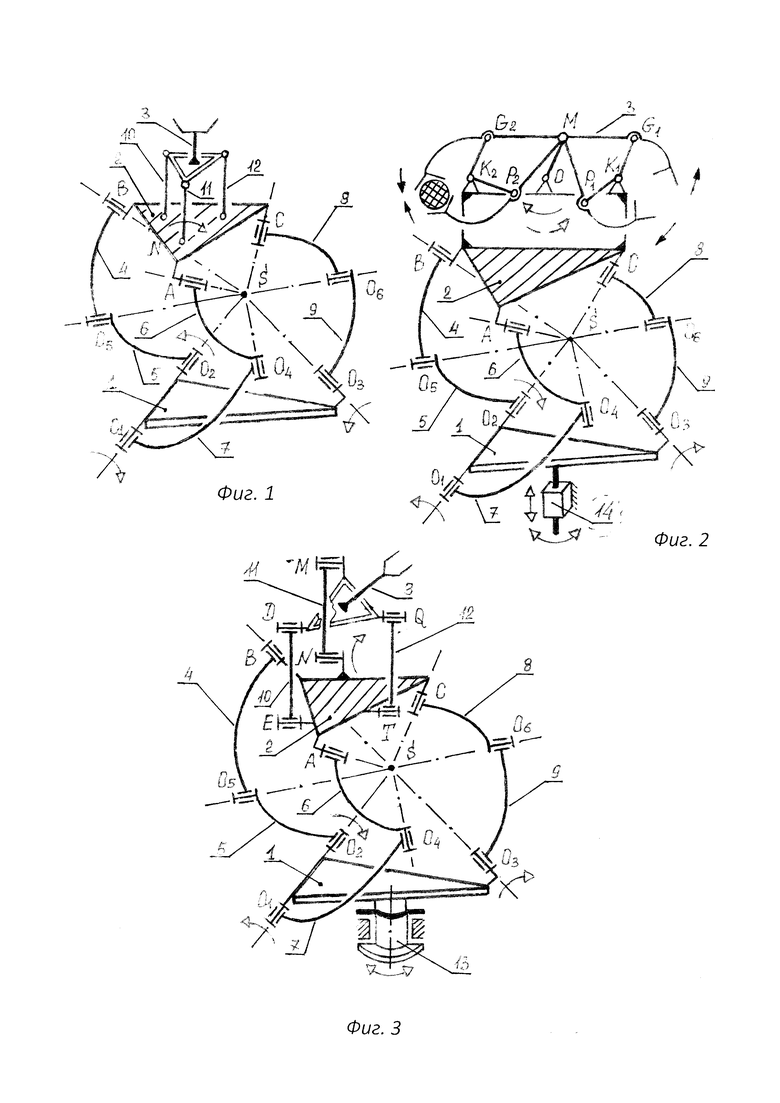
На фиг. 1 изображен общий вид платформенного сферического манипулятора, содержащего опорное основание 1, кинематически связанное с подвижной платформой 2 и рабочим органом 3 посредством приводного шарнирно-рычажного устройства, представляющего общую сборку замкнутой кинематической цепи, содержащей цилиндрические шарниры с пересекающимися между собой осями углового поворота, совместно пересекающимися между собой осями углового поворота, совместно с замкнутой кинематической цепью, содержащей цилиндрические шарниры с параллельными между собой осями углового поворота.
Кинематическая связь между подвижной платформой 2 и опорным основанием 1 выполнена в виде пространственного восьмизвенного сферического шарнирного механизма с тремя степенями свободы, снабженного тремя приводными вращательными кинематическими парами O1, O2 и O3 и содержащего все вращательные кинематические пары O1, O2, O3, O4, O5, O6, А, В и С с осями углового поворота, которые пересекаются между собой в одной точке S, расположенной между опорным основанием 1 и подвижной платформой 2 и определяющей направление вращения двухшарнирных рычагов 4, 5, 6. 7, 8, 9.
Кинематическая связь между рабочим органом 3 и подвижной платформой 2 выполнена в виде плоского пятизвенного шарнирного механизма с одной степенью свободы, в котором соединение рабочего органа 3 с подвижной платформой 2 выполнено в виде трех параллельно установленных между собой кривошипов 10, 11 и 12 одинаковой длины, из которых кривошип 11 снабжен приводной вращательной кинематической парой N, установленной на платформе 2, а все вращательные кинематические пары этого шарнирного механизма выполнены с параллельными между собой осями углового поворота, расположенными под одинаковым углом к плоскости упомянутой подвижной платформы, например, под углом, равным 90 градусов.
Представленный на фиг. 1 платформенный манипулятор обладает четырьмя степенями свободы (W=4) перемещения рабочего органа 3.
На фиг. 2 представлен вариант выполнения платформенного сферического манипулятора, в котором рабочий орган 3 выполнен в виде шарнирно установленного на подвижной платформе 2 двухпозиционного зажимного устройства, содержащего двухшарнирный кривошип ОМ, который одним концом соединен с подвижной платформой 2 через приводную вращательную кинематическую пару «О», другой конец кривошипа ОМ через многократный цилиндрический шарнир М сблокирован с попарно установленными между собой параллелограммным OMG1K1 и антипараллелограммным MP1K1G1 механизмами, а также с другим аналогичными параллелограммным OMG2K2 и антипараллелограммным MP1K1G1 механизмами.
На шатунах MGl, MPl и MG2, MP2 закреплены зажимные элементы для одновременного зажима одного из объектов (например, в виде заготовки) через шатуны MG2 и MP2, происходящего совместно с освобождением от зажима другого объекта (например, в виде готовой детали) через расходящиеся шатуны MG1 и МР1.
Опорное основание 1 снабжено приводной двухподвижной кинематической парой 14, выполненной в виде подвижного гидроцилиндра или двухподвижного самотормозящегося винтового механизма с возможностью осуществления углового поворота и поступательного перемещения опорного основания 1 относительно вертикальной оси для образования многопозиционного схвата робота-манипулятора, перемещающегося по сферической поверхности.
На фиг. 3 представлен вариант выполнения платформенного сферического манипулятора, в котором кинематическая связь между рабочим органом 3 и подвижной платформой 2 выполнена в виде пространственного пятизвенного шарнирного механизма с одной степенью свободы, в котором все вращательные кинематические пары выполнены с параллельными между собой осями углового поворота, расположенными в плоскости платформы 2. Рабочий орган 3 подвижно соединен с платформой 2 через три параллельно установленных между кривошипа 10, 11 и 12 одинаковой длины NM=ED=TQ, из которых кривошип 11 снабжен приводной вращательной кинематической парой N для образования платформенного манипулятора с круговым поступательным движением рабочего органа постоянной ориентации.
Манипулятор снабжен поворотной платформой 13, выполненной с возможностью осуществления шагового поворота от реверсивного вращательного двигателя, а опорное основание 1 установлено на упомянутой поворотной платформе 13.
Работа представленного платформенного манипулятора заключается в следующем.
Заданное движение входных звеньев (указанное стрелками на фиг. 1, фиг. 2 и фиг. 3) для разных вариантов выполнения приводного шарнирно-рычажного устройства комбинированного платформенного манипулятора приводит к движению рабочего органа на выходе по сферической поверхности с увеличенным до пяти (W=5) числом степеней свободы с реализацией раздельной кинематики этих движений в расширенном рабочем пространстве.
Достигаемый в предлагаемом платформенном манипуляторе положительный эффект заключается в упрощении конструкции и системы управления, а также расширении рабочего пространства и функциональности манипулятора на основе увеличения числа степеней свободы рабочего органа с применением только простых цилиндрических шарниров.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАТФОРМЕННЫЙ СТЫКОВОЧНЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2751781C1 |
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ТРЕХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2774279C1 |
| ПАРАЛЛЕЛЬНЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2020 |
|
RU2753217C1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2758607C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ИЗБЫТОЧНЫМ ПРИВОДОМ | 2021 |
|
RU2782460C1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2020 |
|
RU2751780C1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758391C1 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2022 |
|
RU2784764C1 |
Изобретение относится к машиностроению, и в частности к платформенным механизмам параллельной структуры, и может найти применение в автоматических линиях, обрабатывающих центрах и роботах-манипуляторах. Пространственно-плоский платформенный сферический манипулятор содержит опорное основание, кинематически связанное с подвижной платформой и рабочим органом посредством шарнирно-рычажного устройства. Подвижная платформа связана с опорным основанием посредством замкнутой кинематической цепи рычажных звеньев, соединенных между собой через цилиндрические шарниры, содержащие вращательные кинематические пары с пересекающимися между собой осями углового поворота. Рабочий орган связан с подвижной платформой посредством замкнутой кинематической цепи рычажных звеньев, соединенных через цилиндрические шарниры, содержащие вращательные кинематические пары с параллельными между собой осями углового поворота. Изобретение обеспечивает упрощение конструкции и системы управления, а также расширение рабочего пространства и функциональности манипулятора с увеличенным числом степеней свободы рабочего органа. 6 з.п. ф-лы, 3 ил.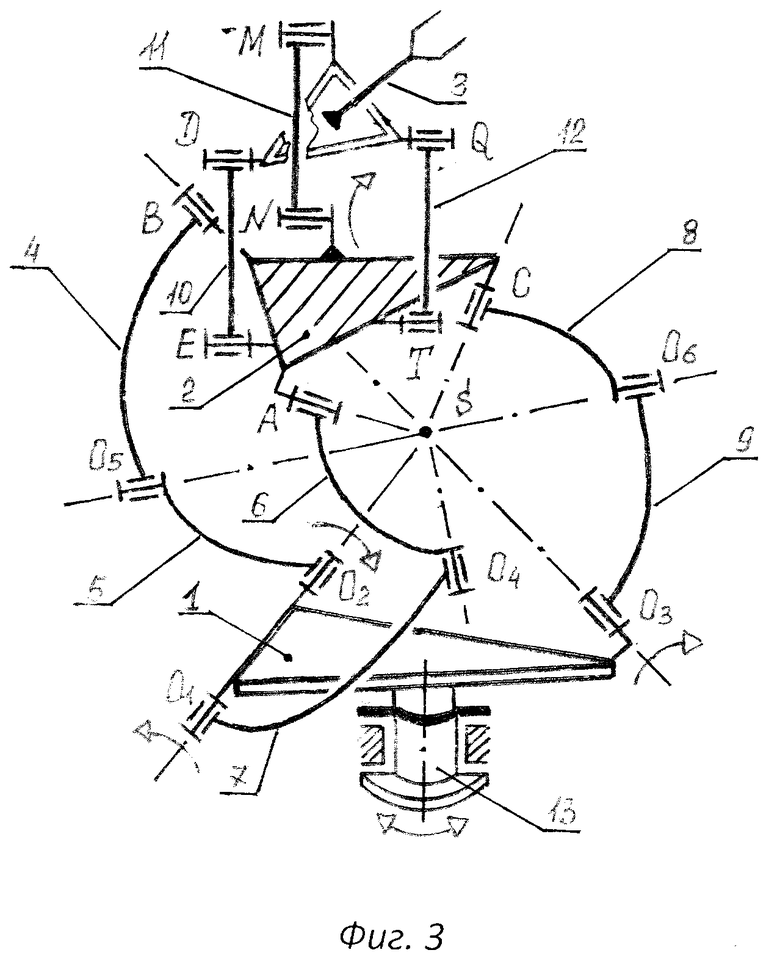
1. Пространственно-плоский платформенный сферический манипулятор, содержащий опорное основание, кинематически связанное с подвижной платформой и рабочим органом посредством приводного шарнирно-рычажного устройства, отличающийся тем, что подвижная платформа связана с опорным основанием посредством замкнутой кинематической цепи рычажных звеньев, соединенных между собой через цилиндрические шарниры, содержащие вращательные кинематические пары с пересекающимися между собой осями углового поворота, а рабочий орган связан с подвижной платформой посредством замкнутой кинематической цепи рычажных звеньев, соединенных через цилиндрические шарниры, содержащие вращательные кинематические пары с параллельными между собой осями углового поворота.
2. Манипулятор по п. 1, отличающийся тем, что кинематическая связь между подвижной платформой и опорным основанием выполнена в виде пространственного восьмизвенного сферического шарнирного механизма с тремя степенями свободы, снабженного тремя приводными вращательными кинематическими парами и содержащего все вращательные кинематические пары с осями углового поворота, пересекающимися между собой в одной точке, расположенной между упомянутыми подвижной платформой и опорным основанием.
3. Манипулятор по п. 1, отличающийся тем, что кинематическая связь между рабочим органом и подвижной платформой выполнена в виде плоского пятизвенного шарнирного механизма с одной степенью свободы, в котором соединение рабочего органа с подвижной платформой выполнено в виде трех параллельно установленных между собой кривошипов одинаковой длины, один из которых снабжен приводной вращательной кинематической парой, а все вращательные кинематические пары этого шарнирного механизма выполнены с параллельными между собой осями углового поворота, расположенными под одинаковым углом к плоскости упомянутой подвижной платформы, например под углом, равным 90 градусов.
4. Манипулятор по п. 1, отличающийся тем, что кинематическая связь между рабочим органом и подвижной платформой выполнена в виде пространственного пятизвенного шарнирного механизма с одной степенью свободы, в котором все вращательные кинематические пары выполнены с параллельными между собой осями углового поворота, расположенными в плоскости упомянутой подвижной платформы, а рабочий орган подвижно соединен с этой платформой через три параллельно установленных между собой кривошипа одинаковой длины, один из которых снабжен приводной вращательной кинематической парой, для образования платформенного манипулятора с круговым поступательным движением рабочего органа постоянной ориентации.
5. Манипулятор по п. 1, отличающийся тем, что рабочий орган выполнен в виде многопозиционного, например двухпозиционного зажимного устройства, содержащего двухшарнирный кривошип с параллельными осями углового поворота цилиндрических шарниров, который одним концом соединен с подвижной платформой через приводную вращательную кинематическую пару, а другим концом сблокирован через многократный цилиндрический шарнир с попарно установленными между собой параллелограммным и антипараллелограммным шарнирными механизмами, на шатунах которых закреплены зажимные элементы для одновременного зажима другого схвата робота-манипулятора, перемещающегося по сферической поверхности и имеющего шесть степеней свободы.
6. Манипулятор по п. 1, отличающийся тем, что он снабжен поворотной платформой, выполненной с возможностью осуществления шагового поворота от реверсивного вращательного двигателя, а опорное основание установлено на упомянутой поворотной платформе.
7. Манипулятор по п. 1, отличающийся тем, что опорное основание снабжено приводной двухподвижной кинематической парой, выполненной в виде подвижного гидроцилиндра или двухподвижного самотормозящегося винтового механизма с возможностью раздельного осуществления углового поворота и поступательного перемещения упомянутого опорного основания относительно вертикальной оси.
| СФЕРИЧЕСКИЙ V-МАНИПУЛЯТОР | 2020 |
|
RU2730345C1 |
| Обмазка для покрытия электродов | 1955 |
|
SU110326A1 |
| US 4878393 A1, 07.11.1989 | |||
| US 4976582 A1, 11.12.1990. | |||

