Изобретение относится к машиностроению, в частности к шарнирным механизмам, преимущественно пространственных манипуляторов, которые могут найти применение в многопозиционных автоматических линиях, сборочных конвейерах, испытательных стендах и обрабатывающих центрах.
Известен шарнирный механизм, содержащий опорную стойку и установленное на ней рычажное устройство привода подвижной платформы с установленным на ней одним рабочим органом от 6 приводных двигателей через 12 сложных сферических шарниров (книга Вульфсон И.И. и др. «Механика машин», Москва: высшая школа, 1996, с. 28, рис. 1.20, платформа Стюарта) - аналог.
Недостатками известного шарнирного механизма пространственного манипулятора являются сложность конструкции и большие пространственные габариты, а также сложная система управления одновременно всеми 6-ю приводными двигателями.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению являются шарнирный механизм пространственного манипулятора, содержащий опорную стойку и шарнирно-сочлененное рычажное устройство передачи движения на рабочие органы, содержащее 6 многозвенных подвижных стержневых опор перемещения платформы с одним рабочим органом посредством 6 приводных двигателей через 12 сложных сферических шарниров (книга Смелягин А.И. «Структура машин, механизмов и конструкций» / Учебное пособие. Москва, ИНФА_М, 2019, с. 154, рис. 2.74 со схемой шарнирного механизма манипулятора) - прототип.
Недостатками указанного шарнирного механизма пространственного манипулятора являются сложность конструкции, большие пространственные габариты (при его транспортировке и хранении), ограниченное рабочее пространство, а также сложная система управления и низкая функциональность, требующая для пространственного перемещения всего одного рабочего органа одновременной работы всех 6 приводных двигателей, и возникновение неуправляемых особых (мертвых) положений.
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции шарнирного механизма пространственного манипулятора, обеспечении ее компактности без разборки и сборки всех узлов манипулятора, увеличение его рабочего пространства и упрощении системы управления.
Получение технического результата достигается за счет того, что шарнирный механизм пространственного манипулятора, содержащий опорную стойку и шарнирно-сочлененное рычажное устройство передачи движения на рабочие органы выполнено в виде замкнутой двухконтурной кинематической цепи, состоящей из шарнирного шестизвенника, звенья которого кинематически связаны между собой и со стойкой посредством установленных на его вершинах цилиндрических шарниров с параллельными осями вращения соединяемых звеньев, а две противоположные стороны шарнирного шестизвенника подвижно соединены между собой посредством двух двухшарнирных соединительных рычагов и цилиндрических шарниров, оси которых расположены перпендикулярно осям цилиндрических шарниров на вершинах упомянутого шестизвенника, при этом замкнутая двухконтурная кинематическая цепь образует пространственный структурный модуль, одна из сторон которого связана с опорной стойкой, а другие его сторон сблокированы с рабочими органами, совершающими пространственное движение.
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3, фиг. 4, фиг. 5, фиг. 6, фиг. 7, фиг. 8, фиг. 9.
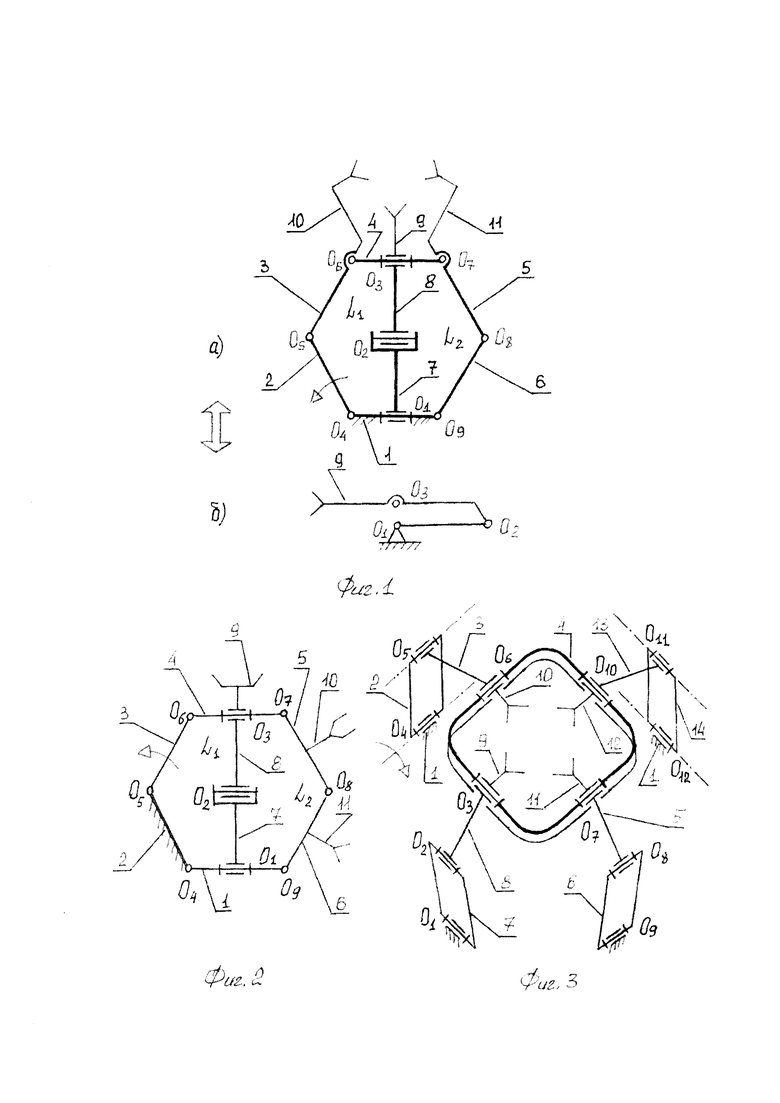
На фиг. 1 изображен общий вид шарнирного механизма пространственного манипулятора, содержащего опорную стойку 1 и рычажное устройство передачи движения на рабочие органы, которое выполнено в виде замкнутой двухконтурной кинематической цепи (с контурами L1 и L2), состоящей из шарнирного шестизвенника О4О5О6О7О8О9, звенья которого 2, 3, 4, 5, 6 и опорная стойка 1 кинематически связаны между собой посредство цилиндрических шарниров с параллельными осями вращения О4,О5,О6,О7,О8 и О9. Две противоположные стороны 1 и 4 шарнирного шестизвенника О4О5О6О7О8О9 подвижно соединены между собой посредством двух двухшарнирсоединительных рычагов 7 и 8 и цилиндрических шарниров О1, О2 и О3, оси которых расположены перпендикулярно осям цилиндрических шарниров О4,О5,О6,О7,О8 и О9 на вершинах упомянутого шестизвенника. При этом замкнутая двухконтурная кинематическая цепь с контурами L1 и L2 образует пространственный структурный модуль, в котором шарнирный шестизвенник составлен из чередующихся между собой четырех двухшарнирных звеньев 2,3 и 5, 6, а также двух трехшарнирных звеньев 1 и 4 с установленными на них тремя рабочими органами 9,10 и 11 для образования пространственного манипулятора с одной степенью свободы для позиционирования зажимаемых изделий. Опорная стойка 1 сблокирована с трехшарнирным звеном O4O9 структурного модуля с вращательным приводом вокруг O4 от смежного с ним двухшарнирного звена 2, расположенного по периметр шарнирного шестизвенника O4O5O6O7O8O9. Компактность механизма достигается за счет простого складывания пространственной структуры (фиг. 1, а) в одной плоскости без ее разборки (фиг. 1, б).
На фиг. 2 представлен вариант выполнения шарнирного механизма, в котором опорная стойка сблокирована с двухшарнирным звеном 2 по периметру шарнирного шестизвенника структурного модуля с вращательным приводом через О5 от смежного с ним двухшарнирного звена 3 для образования платформенного манипулятора с одной степенью свободы и тремя рабочими органами 9, 10 и 11.
На фиг. 3 представлен вариант выполнения шарнирного механизма, в котором структурный модуль, состоящий из звеньев 1, 2, 3, 4, 5, 6, 7 и 8, снабжен дополнительной подвижной стержневой опорой, состоящей из двух дополнительных двухшарнирных соединительных рычагов 13 и 14, установленных между звеньями 1 и 4 и соединенных с ними посредством цилиндрических шарниров, для образования пространственного манипулятора с одной степенью свободы, например, в виде подъемника или четырехстороннего схвата робота или обрабатывающего центра для многооперационных технологий с четырьмя рабочими органами 9, 10, 11 и 12 для обработки и сборки деталей с разных сторон.
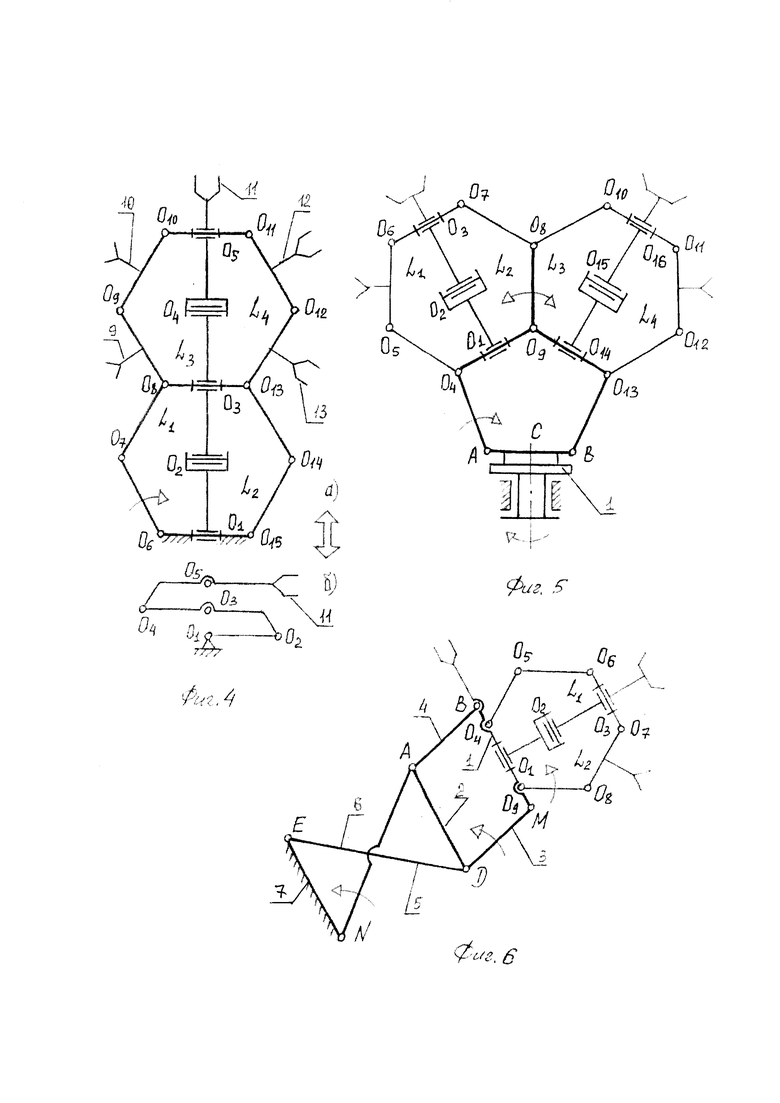
На фиг. 4 представлен вариант выполнения шарнирного механизма, составленного из двух входного и выходного структурных модулей О6О7О8О13О14О15 и двух двойных цилиндрических шарниров О8 и О13 для образования пространственного манипулятора с одной степенью свободы и пятью рабочими органами 9, 10, 11, 12 и 13, установленными на выходном структурном модуле, который соединен с входным структурным модулем через общее трехшарнирное звено О8О13. На фиг. 4,а дано пространственное рабочее положение, на фиг. 4, б - компактное нерабочее.
На фиг. 5 представлен вариант выполнения шарнирного механизма, в котором устройство передачи движения составлено из двух выходных структурных модулей, установленных на две смежные стороны О4О9 и О9О13 шарнирного пятизвенника АО4О9О13В и сблокированных между собой по окружности через общее двухшарнирное звено О8О9 и два двойных цилиндрических шарнира О8 и О9 с приводной вращательной кинематической парой О9. При этом одна сторона АВ шарнирного пятизвенника АО4О9О13В сблокирована с поворотной вокруг оси С платформой 1 для образования сферического манипулятора с тремя степенями свободы.
На фиг. 6 представлен вариант выполнения шарнирного механизма, в котором структурный модуль через звено О4О9 сблокирован с шатуном 1 параллелограммного шарнирного четырехзвенника ABCD (звенья 1, 2, 3, и 4), который через двойные шарниры A и D соединен с антипараллелограммным шарнирным четырехзвенником ADAN (звенья 2, 5, 6 и 7) со скрещивающимся кривошипами 5 и 6, для образования пространственного манипулятора с тремя степенями свободы.
На фиг. 7 представлен вариант выполнения шарнирного механизма, в котором структурные модули установлены на противоположные стороны 1 и 3 шарнирного четырехзвенного, например, параллелограммного замкнутого контура ABCD, составленного из четырех шатунов 1, 2, 3 и 4, которые кинематически связаны между собой и с основанием 5 посредством двух двойных цилиндрических шарниров А, С и двух двухшарнирных соединительных рычагов 6 и 7, применяемых в шарнирном механизме в качестве ведущих кривошипов для образования пространственного манипулятора с четырьмя степенями свободы и рабочими органами 8, 9, 10 и 11.
На фиг. 8 представлен вариант выполнения шарнирного механизма, в котором структурный модуль установлен на шатуне 1 шарнирного четырехзвенника ABMD, составленного из основания 2 и соединенных через шатун 1 ведущего кривошипа 3 и ведомого кривошипа 4, кинематически связанных между собой посредством цилиндрических шарниров с пересекающимися в одной точке Е осями вращения для образования пространственного манипулятора с двумя степенями свободы.
На фиг. 9 представлен вариант выполнения шарнирного механизма, в котором структурный модуль О4О5О6О7О8О9 смонтирован на шатуне 1 двухкривошипного шарнирного четырехзвенника ABCD за пределами его замкнутого контура L3, в котором ведомый кривошип 2 и основание 3 выполнены одинаковой длины CD = AD. При этом длина ведущего кривошипа 4 равна половине длины основания ( ), а сумма длин шатуна 1 и ведущего кривошипа 4 равна сумме длин ведомого кривошипа 2 и основания 3 по условию (АВ+ВС)=(CD+AD) для образования пространственного манипулятора с тремя степенями свободы, в котором основание 3 установлено на поворотную платформу 5 для привода пространственных рабочих органов 6, 7 и 8.
), а сумма длин шатуна 1 и ведущего кривошипа 4 равна сумме длин ведомого кривошипа 2 и основания 3 по условию (АВ+ВС)=(CD+AD) для образования пространственного манипулятора с тремя степенями свободы, в котором основание 3 установлено на поворотную платформу 5 для привода пространственных рабочих органов 6, 7 и 8.
Работа представленного шарнирного механизма заключается в следующем.
Задаваемое в разных вариантах шарнирного механизма с пространственным структурным модулем вращение ведущих звеньев (на фиг. 1-9 показано стрелкой) посредством рычажного устройства передачи движения преобразуется в пространственное вращательное и поступательное движение различных рабочих органов, установленных на разных сторонах структурных модулей.
Для расчета подвижности W установленных в шарнирном механизме пространственных структурных модулей (в схемах на фиг. 1 ÷ фиг.9) можно использовать следующую предложенную автором структурную формулу:

где ñ - общее число звеньев структурного модуля, К - число замкнутых контуров в его кинематической цепи.
Пример 1. В шарнирном механизме (схемы на фиг. 1, фиг. 2, фиг. 3, фиг. 6, фиг. 7, фиг. 8 и фиг. 9, где в каждом из отдельных структурных модулей имеет место ñ=8, К=2 - это контуры L1, L2) по формуле (1) получаем:

Пример 2. Аналогично для схем механизмов на фиг. 4 и фиг. 5 (со сдвоенными пространственными структурными модулями с ñ=14, К=4, n=14, L1, L2, L3 и L4) по формуле (1) получаем:

Полученный для всех схем (фиг. 1-9) результат доказывает работоспособность (W=+1) всех представленных на фиг.1-9 пространственных шарнирных механизмов, которая также подтверждена на их действующих моделях.
Достигаемый в предлагаемом шарнирном механизме, преимущественно для пространственных манипуляторов, положительный эффект заключается в следующем:
1. Упрощение конструкции за счет ее выполнения с более простыми шарнирами и уменьшенным числом приводных двигателей.
2. Увеличение рабочего пространства манипулятора за счет привода сразу нескольких пространственных рабочих органов, упрощение системы управления которыми достигается за счет раздельной кинематики их движений.
3. Компактность пространственного манипулятора в нерабочем положении за счет простого складывания и раскладывания его кинематической цепи без ее разборки и сборки.
4. Расширение функциональности механизма за счет привода от одного двигателя сразу нескольких рабочих органов, совершающих пространственное движение в рабочем пространстве без неуправляемых особых (мертвых) положений в схемах на фиг. 6-9.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКЛАДЫВАЮЩИЙСЯ СИММЕТРИЧНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2023 |
|
RU2821637C1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| КРУГОВОЙ ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2758385C1 |
| СКЛАДЫВАЮЩИЙСЯ ШАРНИРНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2765030C1 |
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
| ПАУТИННЫЙ ШАРНИРНЫЙ МЕХАНИЗМ | 2024 |
|
RU2830218C1 |
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ТРЕХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2774279C1 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2022 |
|
RU2784764C1 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МАНИПУЛЯТОР-ТРИПОД | 2023 |
|
RU2824543C1 |

Изобретение относится к машиностроению. Шарнирный механизм, преимущественно пространственного манипулятора, содержит опорную стойку и шарнирно-сочлененное рычажное устройство передачи движения на рабочие органы, выполненное в виде замкнутой двухконтурной кинематической цепи шарнирного шестизвенника с установленными на его вершинах цилиндрическими шарнирами и приводной вращательной кинематической парой, одна из сторон которого связана с опорной стойкой, а другие его стороны сблокированы с рабочими органами, совершающими пространственное вращательное и поступательное движение. Обеспечивается упрощение конструкции и расширение функциональности механизма. 9 з.п. ф-лы, 9 ил.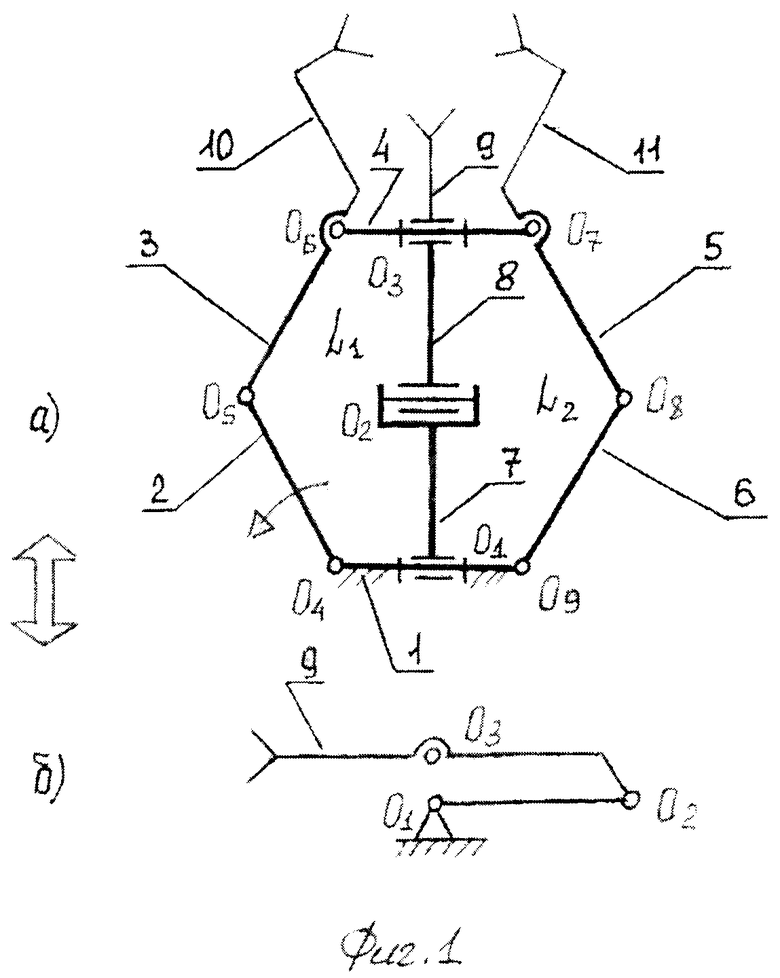
1. Шарнирный механизм, преимущественно пространственного манипулятора, содержащий опорную стойку и шарнирно-сочлененное рычажное устройство передачи движения на рабочие органы, отличающийся тем, что устройство передачи движения выполнено в виде замкнутой двухконтурной кинематической цепи, состоящей из шарнирного шестизвенника с приводной вращательной кинематической парой, звенья которого кинематически связаны между собой и с опорной стойкой посредством установленных на его вершинах цилиндрических шарниров с параллельными осями вращения соединяемых звеньев, а две противоположные стороны шарнирного шестизвенника подвижно соединены между собой посредством двух двухшарнирных соединительных рычагов и цилиндрических шарниров, оси которых расположены перпендикулярно осям цилиндрических шарниров на вершинах упомянутого шестизвенника, при этом замкнутая двухконтурная кинематическая цепь образует пространственный структурный модуль, в котором шарнирный шестизвенник составлен из чередующихся между собой четырех двухшарнирных и двух трехшарнирных звеньев с установленными на них рабочими органами, совершающими пространственное движение.
2. Шарнирный механизм по п. 1, отличающийся тем, что опорная стойка сблокирована с трехшарнирным звеном структурного модуля с вращательным приводом от другого смежного с ним двухшарнирного звена, расположенного по периметру шарнирного шестизвенника для образования пространственного манипулятора с одной степенью свободы, предназначенного для позиционирования и зажима изделий.
3. Шарнирный механизм по п. 1, отличающийся тем, что опорная стойка сблокирована с двухшарнирным звеном по периметру шарнирного шестизвенника структурного модуля, выполненного с вращательным приводом от другого смежного с ним двухшарнирного звена для образования пространственного манипулятора с одной степенью свободы в приводе разных рабочих органов.
4. Шарнирный механизм по п. 1, отличающийся тем, что структурный модуль снабжен дополнительной подвижной стержневой опорой, состоящей из двух дополнительных двухшарнирных соединительных рычагов, установленных между двумя противоположными сторонами шарнирного шестизвенника также посредством цилиндрических шарниров, для образования пространственного манипулятора с одной степенью свободы, например, в виде вертикального подъемника или четырехстороннего схвата робота с четырьмя рабочими органами.
5. Шарнирный механизм по п. 1, отличающийся тем, что устройство передачи движения на рабочие органы составлено их двух входного и выходного структурных модулей с одним общим трехшарнирным звеном, сблокированных между собой по вертикали посредством двух двойных цилиндрических шарниров для образования пространственного манипулятора с одной степенью свободы.
6. Шарнирный механизм по п. 1, отличающийся тем, что устройство передачи движения составлено из двух выходных структурных модулей, установленных на две смежные стороны шарнирного пятизвенника и сблокированных между собой по окружности через общее двухшарнирное звено и два двойных цилиндрических шарнира с приводной вращательной кинематической парой, при этом одна сторона шарнирного пятизвенника сблокирована с поворотной вокруг оси платформой для образования сферического манипулятора с тремя степенями свободы каждого из четырех установленных рабочих органов.
7. Шарнирный механизм по п. 1, отличающийся тем, что структурный модуль сблокирован с шатуном параллелограммного шарнирного четырехзвенника, который через двойные шарниры соединен с антипараллелограммным шарнирным четырехзвенником со скрещивающимися кривошипами, для образования пространственного манипулятора с тремя степенями свободы.
8. Шарнирный механизм по п. 1, отличающийся тем, что структурные модули установлены на стороны шарнирного четырехзвенного, например, параллелограммного контура, составленного из четырех шатунов, которые кинематически связаны между собой и с основанием посредством двух двойных цилиндрических шарниров и двухшарнирных рычагов, используемых в качестве ведущих кривошипов для образования пространственного манипулятора с четырьмя степенями свободы.
9. Шарнирный механизм по п. 1, отличающийся тем, что структурный модуль установлен на шатун шарнирного четырехзвенника, составленного из основания и соединенных через упомянутый шатун ведущего и ведомого кривошипов, кинематически связанных между собой посредством цилиндрических шарниров с пересекающимися в одной точке осями вращения для образования пространственного манипулятора с двумя степенями свободы.
10. Шарнирный механизм по п. 1, отличающийся тем, что структурный модуль смонтирован на шатуне двухкривошипного шарнирного четырехзвенника за пределами его замкнутого контура, в котором ведомый кривошип и основание выполнены одинаковой длины, при этом длина ведущего кривошипа равна половине длины основания, а сумма длин шатуна и ведущего кривошипа равна сумме длин ведомого кривошипа и основания, последнее установлено на поворотную платформу для образования пространственного манипулятора с тремя степенями свободы.
| Способ и прибор для определения глубины залегания камней, пузырей и т.п. в кусках стекла | 1927 |
|
SU7687A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ | 2019 |
|
RU2737249C1 |
| US 5309779 A1, 10.05.1994. | |||

