Изобретение относится к машиностроению, в частности к робототехнике, а именно к пространственным манипуляционным механизмам роботов с пространственным движением рабочих органов и может найти применение в многопозиционных обрабатывающих центрах, сборочных конвейерах для одновременной сборки нескольких узлов, многофункциональных технологических установках и хирургической медицине.
Известен пространственный манипулятор, содержащий опорное основание и подвижное исполнительное устройство с приводом, выполненное в виде выходного звена с одним рабочим органом, установленным на подвижной платформе и соединенным с опорным основанием через 12 сложных сферических шарниров, 6 подвижных стержневых опор, управляемых системой из 6 приводных двигателей (книга Вульфсон И.И. и др. «Механика машин», Москва: Высшая школа, 1996, схема манипулятора на рис. 1.20, с. 28) - аналог.
Недостатками известного пространственного манипулятора являются сложность конструкции, большие пространственные габариты, возможность привода только одного рабочего органа и сложная система управления одновременно всеми шестью приводными двигателями.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению, является пространственный манипулятор, содержащий опорное основание и подвижное исполнительное устройство с вращательным приводом выполненное в виде подвижной платформы с одним рабочим органом, кинематически связанной с опорным основанием через 25 многошарнирных звеньев, 12 сложных сферических шарниров, 24 цилиндрических шарнира, требующих для управления только одним рабочим органом в пределах его ограниченного рабочего пространства вращения сразу 6 приводных двигателей (книга Смелягин А.И. «Структура машин, механизмов и конструкций» / Учебное пособие. - Москва, ИНФА-М, 2019, с. 154, рис. 2.74 со схемой манипулятора) - прототип.
Недостатками указанного пространственного манипулятора являются сложность конструкции и ее пространственной сборки (из 25 многошарнирных рычагов и 6 приводных двигателей), большие пространственные габариты, вес и трудоемкость изготовления; ограниченное рабочее пространство из-за установки только одного рабочего органа и сложная система управления только одного рабочего органа и сложная система управления сразу шестью приводными двигателями для перемещения только одного рабочего органа приводит к низкой функциональности и ограничивает его применение в разных областях техники.
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции пространственного манипулятора; упрощении его сборки за счет ее выполнения только в одной плоскости и снижении его пространственных габаритов; упрощении системы управления манипулятором и расширении его рабочей зоны и функциональности за счет применения только одного приводного двигателя для пространственного перемещения одновременно нескольких рабочих органов.
Получение технического результата достигается за счет того, что предлагаемый пространственный W-манипулятор содержит опорное основание и подвижное исполнительное устройство с вращательным приводом, выполненное в виде набора кинематически связанных между собой структурных модулей, образованных из шести одинаковых шарнирных соединительных рычагов, собираемых в одной плоскости в замкнутую кинематическую цепь, состоящую из замкнутых контуров треугольной формы, каждая из сторон которых состоит из двух одинаковых двухшарнирных звеньев с расположенными на их концах цилиндрическими шарнирами с попарно перпендикулярными осями вращения соединяемых звеньев, сблокированными с рабочими органами, а вершины смежных структурных модулей соединены между собой посредством цилиндрических шарниров с параллельными осями вращения.
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3, фиг. 4, фиг. 5, фиг. 6, фиг. 7, фиг. 8 и фиг. 9.
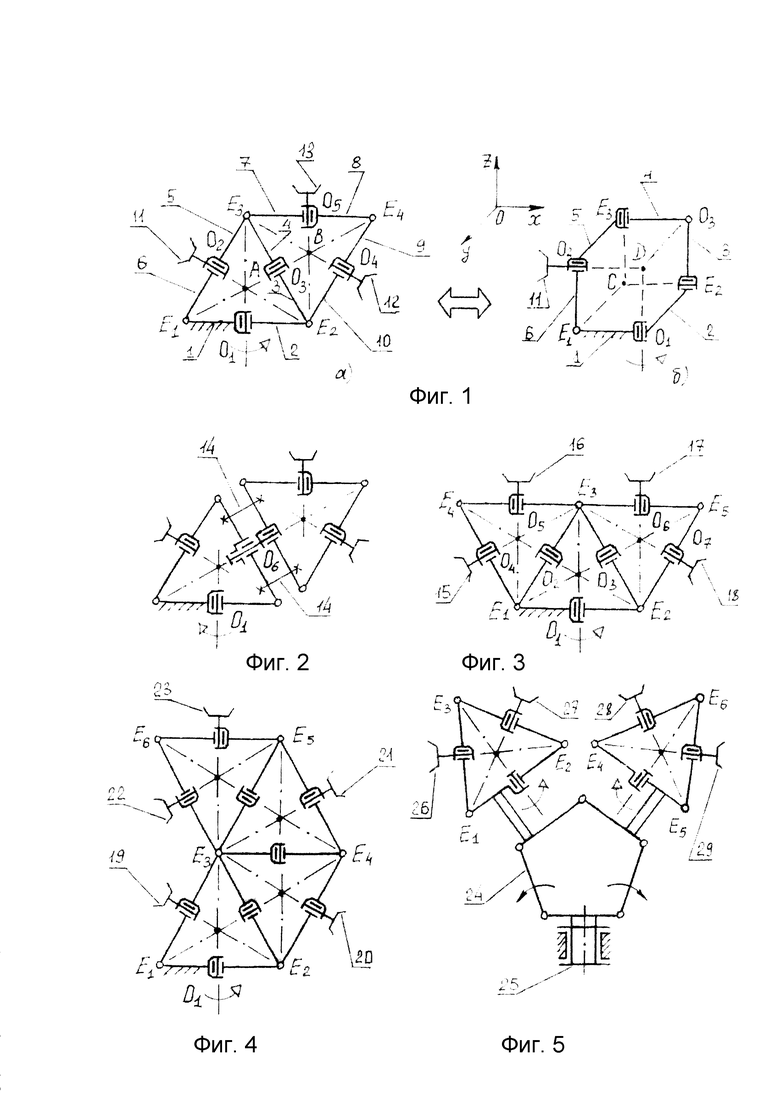
На фиг. 1 изображен общий вид пространственного W-манипулятора, содержащего опорное основание 1 и подвижное исполнительное устройство, выполненное в виде набора, например, из двух структурных модулей, образованных из шести одинаковых шарнирных соединительных рычагов 1, 2, 3, 4, 5, 6 и 3, 4, 7, 8, 9, 10; собираемых в одной плоскости «zOx» в замкнутую кинематическую цепь, состоящую из замкнутых контуров треугольной формы Е1Е2Е3 и Е2Е3Е4, каждая из сторон которых (например, сторона Е1Е3) состоит из двух одинаковых двухшарнирных звеньев (например, 5 и 6) с расположенными на их концах цилиндрическими шарнирами Е1, O2 и O2, Е3 с попарно перпендикулярными осями вращения соединяемых звеньев (например, ось Е1 перпендикулярна оси O2, ось Е3 перпендикулярна оси O3, а ось Е2 перпендикулярна оси О1).
Оси цилиндрических шарниров О1, O2 и O3 пересекаются между собой в точке А внутри одного структурного модуля, а оси цилиндрических шарниров O3, O4 и O5 пересекаются между собой в точке В внутри другого смежного структурного модуля; при этом обе точки пересечения А и В расположены в общей плоскости сборки «xOz». Вершины собираемых смежных структурных модулей связаны между собой посредством цилиндрических шарниров O2, O4 и O5 сблокированы с разными рабочими органами 11, 12 и 13. Один из структурных модулей снабжены приводной вращательной кинематической парой О1 для образования пространственного манипулятора с тремя рабочими органами с приводом от одного ведущего звена 2.
Положение сборки звеньев структурных модулей в одной плоскости «xOz» представлено на фиг. 1, а). Рабочее положение звеньев структурных модулей в пространстве «х - у - z» с пересечением осей цилиндрических шарниров О1, O2 и O3 (в пространственной точке С) и осей цилиндрических шарниров Е1, Е2 и Е3 (в пространственной точке D) представлено на фиг. 1, б).
На фиг. 2 представлен вариант выполнения пространственного W-манипулятора, в котором смежные между собой структурные модули установлены с возможностью относительного углового разворота на оси соединяющего их цилиндрического шарнира О6 и их последующей фиксации между собой посредством фиксаторов 14.
На фиг. 3 представлен вариант выполнения пространственного W-манипулятора, в котором замкнутая кинематическая цепь выполнена в виде параллельной сборки между собой в одной плоскости «xOz» трех смежных одинаковых структурных модулей, выполненных с расположенными посередине их сторон и пересекающимися между собой осями цилиндрических шарниров O2, O4, O5 и О1, O2, O3, а также O3, О6, O7 для образования пространственного манипулятора с приводной вращательной кинематической парой О1 и четырьмя рабочими органами 15, 16, 17 и 18.
На фиг. 4 представлен вариант выполнения пространственного W-манипулятора, в котором замкнутая кинематическая цепь выполнена в виде последовательной сборки между собой в одной плоскости «xOz» четырех структурных модулей, выполненных в виде одинаковых равносторонних треугольников Е1Е2Е3, Е2Е3Е4, Е3Е4Е5 и E3E5E6, оси цилиндрических шарниров которых сблокированы с пятью рабочими органами 19, 20, 21, 22 и 23.
На фиг. 5 представлен вариант выполнения пространственного W-манипулятора, в котором структурные модули Е1Е2Е3 и Е4Е5Е6 сблокированы со сторонами шарнирного пятизвенника 24, установленного на поворотную платформу 25, ось вращения которой расположена в плоскости сборки «xOz» упомянутых структурных модулей для образования пространственного манипулятора с четырьмя рабочими органами 26, 27, 28 и 29.
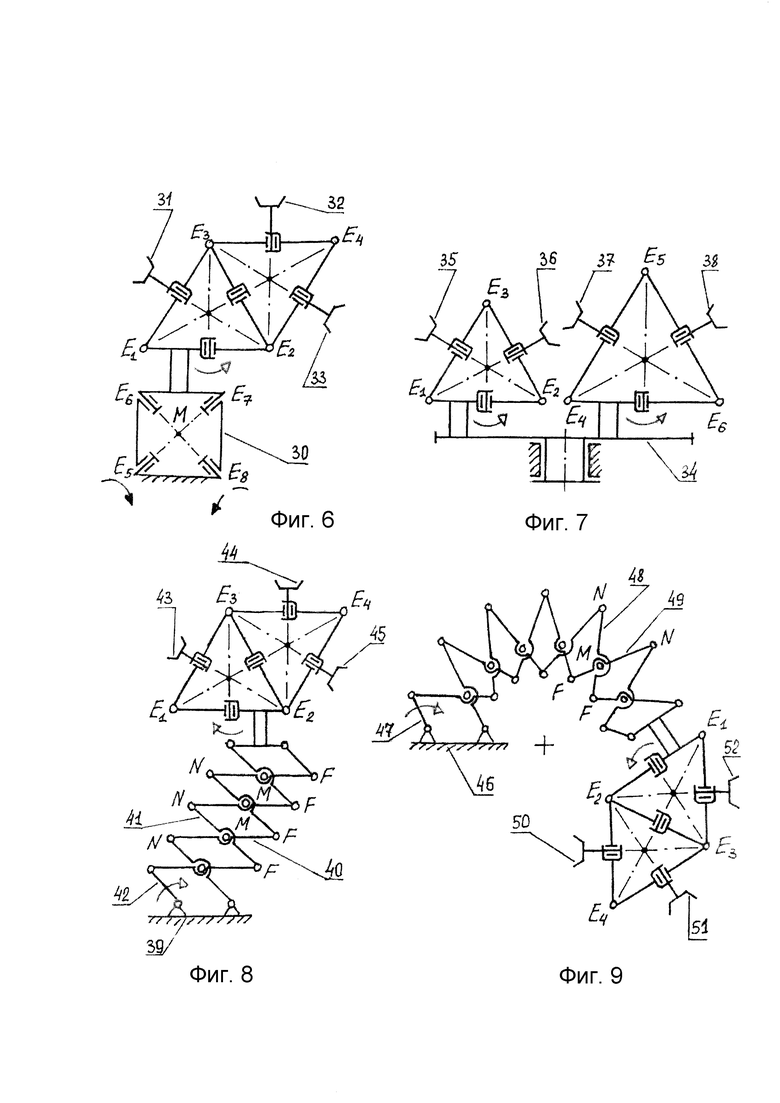
На фиг. 6 представлен вариант выполнения пространственного W-манипулятора, в котором замкнутая кинематическая цепь выполнена в виде сборки в одной плоскости «xOz» двух смежных структурных модулей Е1Е2Е3 и Е2Е3Е4, один из которых Е1Е2Е3 сблокирован с шарнирным четырехзвенником 30, в котором оси всех четырех цилиндрических шарниров E5, Е6, Е7 и Е8 пересекаются между собой в плоскости сборки «xOz» в одной точке М, совпадающей с центром четырехзвенника 30 для образования пространственного манипулятора с тремя рабочими органами 31, 32, 33.
На фиг. 7 представлен вариант выполнения W-манипулятора, в котором структурные модули выполнены в виде равносторонних треугольников разного размера Е1Е2Е3 и Е4Е5Е6 и установлены по окружности поворотной платформы 34, ось вращения которой и оси симметрии всех структурных модулей расположены в одной плоскости из сборки «xOz» для образования пространственного манипулятора с четырьмя рабочими органами 35, 36, 37,38.
На фиг. 8 представлен вариант выполнения пространственного W-манипулятора, в котором структурные модули Е1Е2Е3 и Е2Е3Е4 кинематически связаны с опорным основанием 39 через шарнирно-скрещивающиеся попарно между собой одинаковые соединительные двухплечие рычаги 40, 41 и через шарнирный параллелограмм 42 для образования прямолинейно-направляющего пространственного манипулятора с тремя рабочими органами 43, 44 и 45, в котором двухплечие рычаги 40 и 41 выполнены симметричными с одинаковой длиной плеч NM=MF относительно соединяющего их центрального шарнира М.
На фиг. 9 представлен вариант выполнения W-манипулятора, с кинематической связью структурных модулей Е1Е2Е3 и Е2Е3Е4 с опорным основанием 46 через шарнирный параллелограмм 47 и одинаковые шарнирно-скрещивающиеся попарно между собой несимметричные двухплечие рычаги 48 и 49 с неодинаковой длиной плеч согласно их неравенства NM>MF для образования окружности-направляющего пространственного манипулятора с тремя рабочими органами 50, 51 и 52.
Работа представленного W-манипулятора заключается в следующем:
Вращение ведущего вала в W-манипуляторе преобразуется в пространственное движение в координатах «х - у - z» одновременно нескольких рабочих органов, что расширяет рабочее пространство манипулятора, повышает его производительность и упрощает систему управления. Особенностью W-манипулятора является его сборка из плоских структурных модулей, состоящий из набора одинаковых двухшарнирных звеньев и работа в пространстве. Указанный внутри цикловой переход от плоской конструкции структурных модулей (фиг. 1, а)) в пространственной конструкции расположения звеньев пространственных модулей и связанных с ними рабочих органов (фиг. 1, б)) производится без разборки узлов W-манипулятора путем простого поворота ведущего звена 2 вокруг оси O1.
При вращении ведущего звена каждой из установленных в структурных модулях W-манипулятора рабочих органов совершает различное сложное вращательное движение вокруг нескольких осей в рабочем пространстве в координатах «х - у - z». Например, применительно к пространственному W-манипулятора на фиг. 1:
1) Рабочий орган 11 совершает сложное движение, состоящее из вращения вокруг двух осей (вокруг параллельной оси Е1 и вокруг пересекающейся оси O2).
2) Рабочий орган 12 совершает сложное движение, состоящее из вращения вокруг трех осей (вокруг двух пересекающихся осей O1; O4 и параллельной оси Е2).
3) Рабочий орган 13 совершает сложное движение, состоящее из вращения вокруг пяти осей (вокруг трех пересекающихся осей O1, O4, O5 и двух параллельных осей Е2, E4).
Подвижность F механизма W-манипулятора, составленного из смежных структурных модулей количеством K (например, K=2 в схемах на фиг. 1, фиг. 2, фиг. 6, фиг. 8, фиг. 9 или K=3 в схеме на фиг. 3; или K=4 в схеме на фиг. 4), можно рассчитать по предлагаемой автором простой формуле:

где  - общее число звеньев замкнутой кинематической цепи (в виде двухшарнирных соединительных рычагов), применяемых для сборки структурных модулей;
- общее число звеньев замкнутой кинематической цепи (в виде двухшарнирных соединительных рычагов), применяемых для сборки структурных модулей;
K - число образующихся в кинематической цепи замкнутых контуров (равное количеству установленных в W-манипуляторе смежных структурных модулей).
Например, для представленного на фиг. 1 варианта пространственного W-манипулятора (содержащего =10 общее число звеньев для сборки K=2 смежных структурных модулей Е1Е2Е3 и Е2Е3Е4) по формуле (1) получаем:
F=-4K-1=10-4*2-1=1,
что подтверждает работоспособность предлагаемого W-манипулятора.
Достигаемый в предлагаемом пространственном W-манипулятора положительный эффект заключается в следующем:
1. Упрощение конструкции, простая сборка в плоскости и работа в пространстве.
2. Снижение веса, пространственных габаритов и компактность в нерабочем состоянии.
3. Расширение рабочего пространства и упрощение системы управления за счет одновременного привода нескольких разных рабочих органов для их движения в пространстве с применением одного двигателя.
4. Расширение функциональности за счет сочетания работы в полном пространстве с возможностью компактного складывания только в одной плоскости, что расширяет области применения манипулятора в разных областях техники.
5. Автоматический внутри цикловой переход (простым поворотом ведущего звена) от плоской компактной конструкции W-манипулятора (фиг. 1, а) - требуемой при сборке, транспортировке и хранении) к пространственной конструкции (фиг. 1, б) - для работы во всем пространстве «х - у - z»), который производится без разборки и обратной сборки всего манипулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКЛАДЫВАЮЩИЙСЯ СИММЕТРИЧНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2023 |
|
RU2821637C1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758391C1 |
| ПРОСТРАНСТВЕННО-ПЛОСКИЙ ПЛАТФОРМЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2781602C1 |
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| КРУГОВОЙ ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2758385C1 |
| СКЛАДЫВАЮЩИЙСЯ ШАРНИРНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2765030C1 |
| ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ СКЛАДЫВАЮЩИЙСЯ МАНИПУЛЯТОР | 2021 |
|
RU2759552C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ ИЗМЕНЯЕМОЙ СТРУКТУРЫ | 2021 |
|
RU2765386C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ТРЕХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2774279C1 |
Изобретение относится к робототехнике и может быть использовано в многопозиционных обрабатывающих центрах, на сборочных конвейерах и в многофункциональных технологических установках. Манипулятор содержит опорное основание, подвижное исполнительное устройство с вращательным приводом и рабочие органы. Исполнительное устройство выполнено в виде кинематически связанных между собой структурных модулей, собранных в одной плоскости в замкнутую кинематическую цепь. Кинематическая цепь состоит из замкнутых контуров треугольной формы, каждый из которых образован из шести одинаковых двухшарнирных звеньев. На концах звеньев расположены цилиндрические шарниры с перпендикулярными осями вращения. Каждая из сторон замкнутого контура состоит из двух двухшарнирных звеньев. Рабочие органы установлены на структурных модулях. В результате обеспечивается упрощение конструкции и сборки манипулятора и расширение его рабочей зоны. 8 з.п. ф-лы, 9 ил.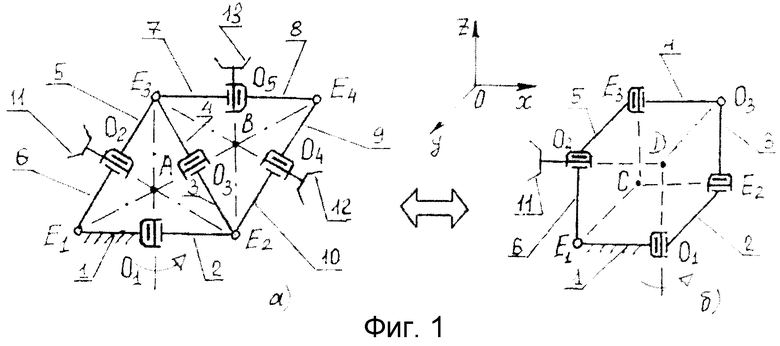
1. Пространственный манипулятор, содержащий опорное основание, подвижное исполнительное устройство с вращательным приводом и рабочие органы, отличающийся тем, что подвижное исполнительное устройство выполнено в виде кинематически связанных между собой структурных модулей, собранных в одной плоскости в замкнутую кинематическую цепь, состоящую из замкнутых контуров треугольной формы, каждый из которых образован из шести одинаковых двухшарнирных звеньев с расположенными на их концах цилиндрическими шарнирами с перпендикулярными осями вращения, при этом каждая из сторон упомянутого замкнутого контура состоит из двух упомянутых двухшарнирных звеньев, а рабочие органы установлены на структурных модулях.
2. Пространственный манипулятор по п. 1, отличающийся тем, что он содержит три рабочих органа, замкнутая кинематическая цепь состоит из двух одинаковых структурных модулей, а оси трех цилиндрических шарниров каждого структурного модуля пересекаются в одной точке внутри структурного модуля, при этом один из упомянутых структурных модулей сблокирован с опорным основанием и снабжен приводной вращательной кинематической парой, а три рабочих органа сблокированы с осями трех цилиндрических шарниров из упомянутых выше цилиндрических шарниров двух структурных модулей.
3. Пространственный манипулятор по п. 2, отличающийся тем, структурные модули установлены с возможностью относительного углового разворота на оси соединяющего их цилиндрического шарнира и последующей фиксации между собой.
4. Пространственный манипулятор по п. 1, отличающийся тем, что он содержит четыре рабочих органа, а замкнутая кинематическая цепь состоит из трех одинаковых структурных модулей.
5. Пространственный манипулятор по п. 1, отличающийся тем, что он содержит пять рабочих органов, а замкнутая кинематическая цепь состоит из последовательно собранных четырех структурных модулей, а рабочие органы сблокированы с осями цилиндрических шарниров упомянутых четырех структурных модулей.
6. Пространственный манипулятор по п. 1, отличающийся тем, что он содержит четыре рабочих органа, а структурные модули сблокированы со сторонами шарнирного пятизвенника, установленного на платформе, имеющей возможность поворота вокруг оси вращения, расположенной в плоскости сборки структурных модулей.
7. Пространственный манипулятор по п. 1, отличающийся тем, что он содержит три рабочих органа, а замкнутая кинематическая цепь состоит из двух структурных модулей, один из которых сблокирован с шарнирным четырехзвенником, в котором оси всех четырех цилиндрических шарниров пересекаются между собой в плоскости в одной точке, совпадающей с центром упомянутого шарнирного четырехзвенника.
8. Пространственный манипулятор по п. 1, отличающийся тем, что он содержит разные рабочие органы, а структурные модули кинематически связаны с опорным основанием посредством попарно скрещивающихся между собой одинаковых соединительных двуплечих рычагов и шарнирного параллелограмма, выполненного с приводной вращательной кинематической парой, при этом соединительные двуплечие рычаги выполнены с плечами одинаковой длины, расположенными симметрично относительного соединяющего их цилиндрического шарнира с обеспечением прямолинейного перемещения структурных модулей с разными рабочими органами.
9. Пространственный манипулятор по п. 1, отличающийся тем, что он содержит разные рабочие органы, а структурные модули кинематически связаны с опорным основанием посредством попарно скрещивающихся между собой одинаковых соединительных двуплечих рычагов и шарнирного параллелограмма, выполненного с приводной вращательной парой, при этом соединительные двуплечие рычаги выполнены с плечами неодинаковой длины, расположенными относительно соединяющего их цилиндрического шарнира, с обеспечением перемещения структурных модулей с разными рабочими органами по окружности.
| ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ VIP-МАНИПУЛЯТОР | 2019 |
|
RU2722165C1 |
| СПОСОБ ПОЛУЧЕНИЯ ДДТ | 0 |
|
SU170930A1 |
| RU 182801 U1, 03.09.2018 | |||
| US 7367772 B2, 06.05.2008 | |||
| US 10710249 B2, 14.07.2020. | |||

