Изобретение относится к механизмам параллельной структуры с замкнутой кинематической цепью и может найти применение в приводах манипуляторов и роботов в обрабатывающих центрах, автоматических линиях, хирургической медицине, испытательных стендах и других технологиях, где требуется обеспечить постоянство заданной ориентации платформы с рабочим органом при ее перемещении в рабочем пространстве манипулятора.
Известен манипуляционный механизм в виде платформы Стюарта, содержащий замкнутую кинематическую цепь, состоящую из двух шестишарнирных звеньев в виде опорного основания и подвижной платформы, соединенных между собой посредством шести опорных ног, двенадцати сложных сферических шарниров с приводом от шести поступательных линейных двигателей в виде гидроцилиндров - аналог (книга Вульфсон И.И. и др. «Механика машин», М.: Высшая школа, 1996, с. 28, рис. 1.20 со схемой «Платформа Стюарта»).
Недостатками известного манипуляционного механизма являются:
1. Сложная конструкция звеньев, сферических шарниров с пересечением всех осей вращения только в одной точке, большие габариты в нерабочем положении и ограниченная рабочая зона из-за наличия особых неуправляемых положений рабочего органа.
2. Очень сложная система управления одновременной зависимой работой сразу всех шести приводных двигателей для реализации любого требуемого перемещения рабочего органа.
3. Нарушение постоянства ориентации рабочего органа из-за возникающего углового перекоса подвижной платформы.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является шарнирный платформенный манипулятор, содержащий опорное основание и установленное на нем устройство позиционирования рабочего органа на основе приводной замкнутой шарнирно-рычажной кинематической цепи, содержащей два трехшарнирных звена, три параллелограммных механизма опорных ног с множеством вращательных кинематических пар, оси которых перпендикулярны осям вращения приводных вращательных пар с приводом от трех двигателей - прототип (Gavel R. 1990. United States Patent No. 4,975, 582).
Недостатками указанного шарнирного платформенного манипулятора являются:
1. Сложная конструкция рычажных звеньев с взаимно-перпендикулярными осями углового вращения шарниров, высокая трудоемкость их изготовления и сборки, а также большие габариты из-за большой номенклатуры звеньев и приводных двигателей.
2. Сложная система управления одновременно тремя установленными приводными двигателями для обеспечения требуемого точного позиционирования рабочего органа.
3. Наличие особых неуправляемых положений (singularity), приводящих к угловым перекосам подвижной платформы с рабочим органом и нарушению его заданной постоянной ориентации, что уменьшает рабочую зону манипулятора.
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции манипуляционного механизма, расширении рабочей зоны и упрощении системы управления перемещением рабочего органа за счет применения предельно простых двухшарнирных звеньев одинаковой длины для сборки из них компактной замкнутой кинематической цепи с раздельным приводом от одного из двух установленных приводных двигателей.
Получение технического результата достигается за счет того, что в предлагаемом шарнирном платформенном манипуляторе устройство позиционирования рабочего органа выполнено в виде шарнирного прямоугольника, составленного из восьми коротких двухшарнирных звеньев одинаковой длины, вершины которых попарно соединены между собой посредством четырех попарно параллельных длинных двухшарнирных звеньев одинаковой длины и восьми двойных шарниров с параллельными осями их углового поворота, а одно из которых двухшарнирных звеньев шарнирного прямоугольника сблокировано с опорным основанием в качестве стойки.
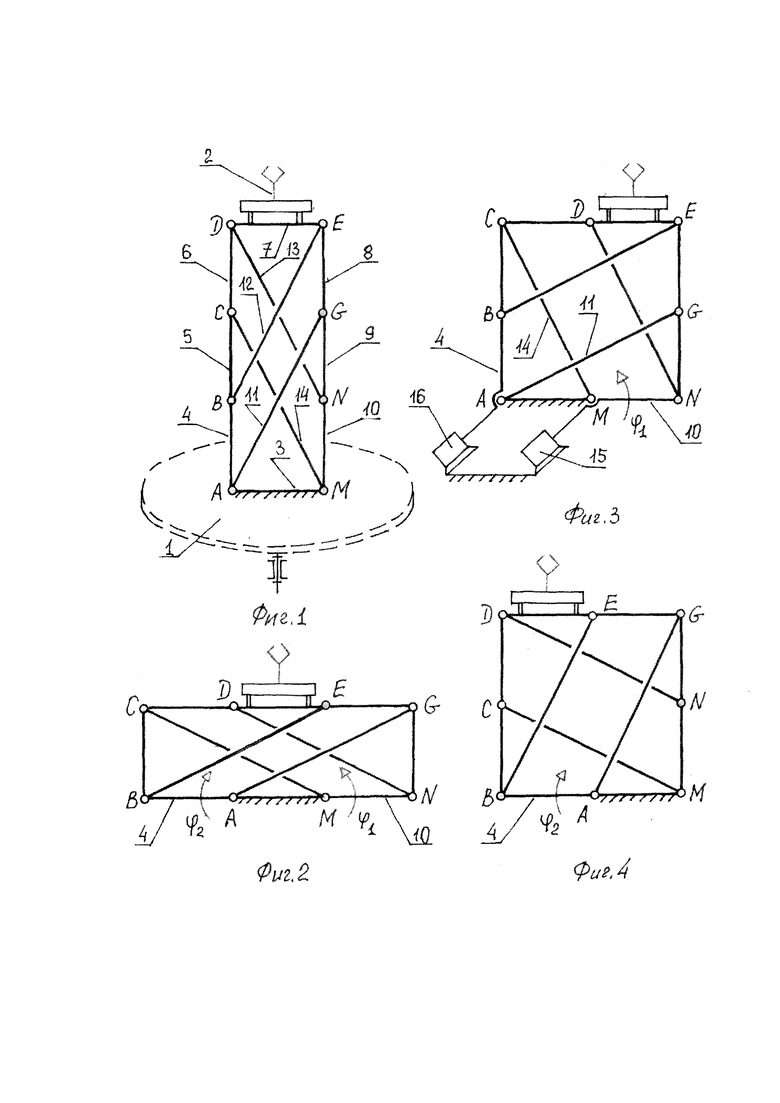
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3 и фиг. 4.
На фиг. 1 изображен общий вид шарнирного платформенного манипулятора, содержащего опорное основание 1 и установленное на нем устройство позиционирования рабочего органа 2, выполненные в виде шарнирного прямоугольника ABCDEGNM, составленного из восьми коротких двухшарнирных звеньев 3, 4, 5, 6, 7, 8, 9, 10 одинаковой длины l1=const, вершины которых А, В, С, D, Е, G, N и М попарно соединены (А и G, В и Е, С и М, D и N) посредством четырех попарно параллельных длинных двухшарнирных звеньев 11, 12, 13 и 14 одинаковой длины l2>2l1 и восьми двойных шарниров с параллельными осями их углового поворота (образованных двумя короткими и одним длинным звеньями 3, 4 и 11 на вершине А; звеньями 4, 5 и 12 на вершине В; звеньями 5, 6 и 14 на вершине С; звеньями 6, 7 и 13 на вершине D; звеньями 7, 8 и 12 на вершине Е; звеньями 8, 9 и 11 на вершине G; звеньями 9, 10 и 13 на вершине N; а также звеньями 3, 10 и 14 на вершине М). В замкнутой кинематической цепи шарнирного прямоугольника ABCDEGNM короткое двухшарнирное звено 3 сблокировано с опорным основанием 1 выполнено в виде приводной вращающейся платформы. Привод замкнутой кинематической цепи шарнирного прямоугольника ABCDEGNM выполнен в виде двух последовательно работающих приводных поворотных двигателей 15 и 16, соединенных с расположенными на стойке двумя короткими двухшарнирными звеньями 4 и 10.
На фиг. 1 также представлена предельная конфигурация замкнутой кинематической цепи манипулятора в виде компактного вертикального шарнирного прямоугольника, обеспечивающая верхнее горизонтальное положение рабочего органа.
На фиг. 2 представлена предельная конфигурация замкнутой кинематической цепи манипулятора в виде компактного горизонтального шарнирного прямоугольника, обеспечивающая нижнее горизонтальное положение рабочего органа.
На фиг. 3 и фиг. 4 представлены промежуточные конфигурации замкнутой кинематической цепи манипулятора в виде шарнирного квадрата с крайним правым (фиг. 3) или крайним левым (фиг. 4) горизонтальным положением рабочего органа.
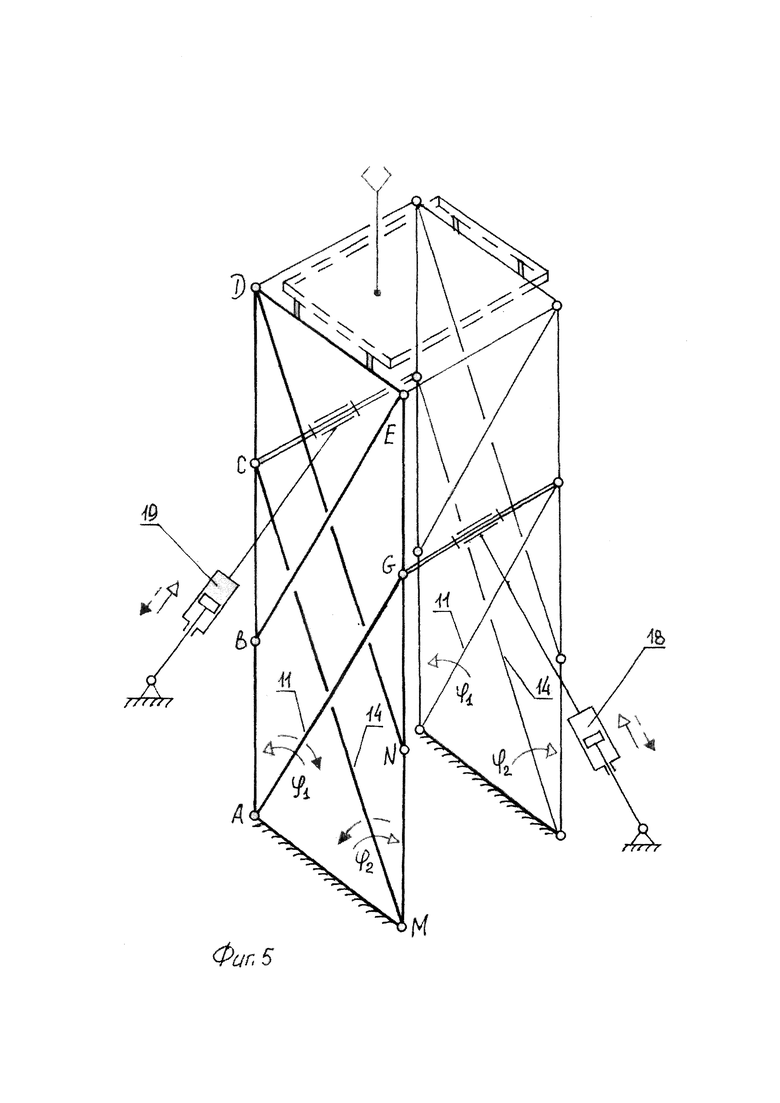
На фиг. 5 представлен вариант пространственной схемы шарнирного платформенного манипулятора, в котором устройство позиционирования рабочего органа выполнено в виде многократного, например, двухкратного механизма, состоящего из двух одинаковых шарнирных прямоугольников ABCDEGNM, установленных на опорном основании 1 в параллельных плоскостях и сблокированных между собой через подвижную платформу, которые выполнены с приводом расположенных на стойке (в виде звена 3) двух длинных двухшарнирных звеньев 11 и 14 от двух последовательно работающих линейных двигателей, например, в виде установленных на опорном основании 1 подвижных гидроцилиндров 18 и 19.
Работа представленного шарнирного манипулятора заключается в следующем.
Управляемое перемещение рабочего органа 2 шарнирного платформенного манипулятора и его точное позиционирование в рабочем пространстве может осуществляется на одном из трех следующих режимов (N1, N2, N3):
1) При включении двигателя 15 за счет углового поворота ведущего звена 10 в направлении ϕ1 рабочий орган 2 (фиг. 3) переходит в предельное верхнее вертикальное положение (фиг. 1) при точном сохранении горизонтальной ориентации выходного звена 7 манипулятора (т.е. при сохранении точного вертикального расположения установленного на него рабочего органа 2.
2) При включении другого приводного двигателя 16 (и отключении при этом двигателя 15) за счет углового поворота другого ведущего звена 4 в направлении ϕ2 (фиг. 4) рабочий орган 2 переходит в предельное нижнее горизонтальное положение (фиг. 2) при точном сохранении горизонтальной ориентации выходного звена 7 манипулятора и связанного с ним точного расположения рабочего органа).
3) При последовательном (друг за другом) единичном включении:
а) сначала только приводного двигателя 15 с угловым поворотом в направлении ϕ1 (фиг. 2);
б) а затем только приводного двигателя 16 с угловым поворотом в направлении ϕ2 (фиг. 2);
в) происходит управляемый переход рабочего органа 2 из предельного нижнего положения (фиг. 2) в предельное верхнее положение (фиг. 1) при сохранении его точной угловой ориентации во всем рабочем пространстве манипулятора.
Аналогичные 3 режима работы манипулятора имеют место в пространственной схеме его конструкции (фиг. 5) при следующих вариантах управления манипулятором:
1) При включении только гидроцилиндра 18 и угловом повороте ведущего длинного двухшарнирного звена 11 в направлении ϕ1 обеспечивается указанный выше режим N1).
2) При включении только гидроцилиндра 19 и угловом повороте другого ведущего длинного двухшарнирного звена 14 в направлении ϕ2 обеспечивается указанный выше режим N2).
3) При последовательном включении (друг за другом) сначала только гидроцилиндра 18 (при выключенном другом гидроцилиндре 19), а затем включении только гидроцилиндра 19 (при выключенном другом гидроцилиндре 18) за счет последовательного поочередного поворота каждого из ведущих звеньев 11 (в направлении ϕ1) и 14 (в направлении ϕ2) обеспечивается указанный выше режим N3).
Достигаемый в предлагаемом шарнирном платформенном манипуляторе положительный эффект заключается в следующем:
1. Упрощение конструкции, снижение трудоемкости изготовления и сборки, а также габаритов манипулятора за счет применения только предельно простых двухшарнирных звеньев одинаковой длины и возможности компоновки всех звеньев цепи в одну линию (как по вертикали, так и по горизонтали).
2. Сохранение точной ориентации платформы с рабочим органом (например, горизонтальной) при ее перемещении во всем рабочем пространстве манипулятора.
3. Увеличенная рабочая зона и упрощение системы управления за счет применения раздельной (друг за другом) работы всего двух приводных двигателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАТФОРМЕННЫЙ РОБОТ | 2020 |
|
RU2751778C1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2758607C1 |
| ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ СКЛАДЫВАЮЩИЙСЯ МАНИПУЛЯТОР | 2021 |
|
RU2759552C1 |
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758391C1 |
| ПРОСТРАНСТВЕННО-ПЛОСКИЙ ПЛАТФОРМЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2781602C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ИЗБЫТОЧНЫМ ПРИВОДОМ | 2021 |
|
RU2782460C1 |
| ПЛАТФОРМЕННЫЙ СТЫКОВОЧНЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2751781C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ТРЕХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2774279C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
Изобретение относится к механизмам параллельной структуры с замкнутой кинематической цепью и может найти применение в обрабатывающих центрах, автоматических линиях, хирургической медицине, где требуется постоянство заданной ориентации платформы с рабочим органом. Манипулятор содержит опорное основание и установленное на нем устройство позиционирования рабочего органа в виде приводной замкнутой шарнирно-рычажной кинематической цепи. Кинематическая цепь выполнена в виде шарнирного прямоугольника, состоящего из восьми коротких двухшарнирных звеньев одинаковой длины, вершины которых попарно соединены посредством четырех попарно параллельных длинных двухшарнирных звеньев одинаковой длины и восьми двойных шарниров с параллельными осями их углового поворота. Одно из коротких двухшарнирных звеньев шарнирного прямоугольника сблокировано с опорным основанием. В результате обеспечивается упрощение конструкции манипулятора и увеличение его рабочей зоны. 1 з.п. ф-лы, 5 ил.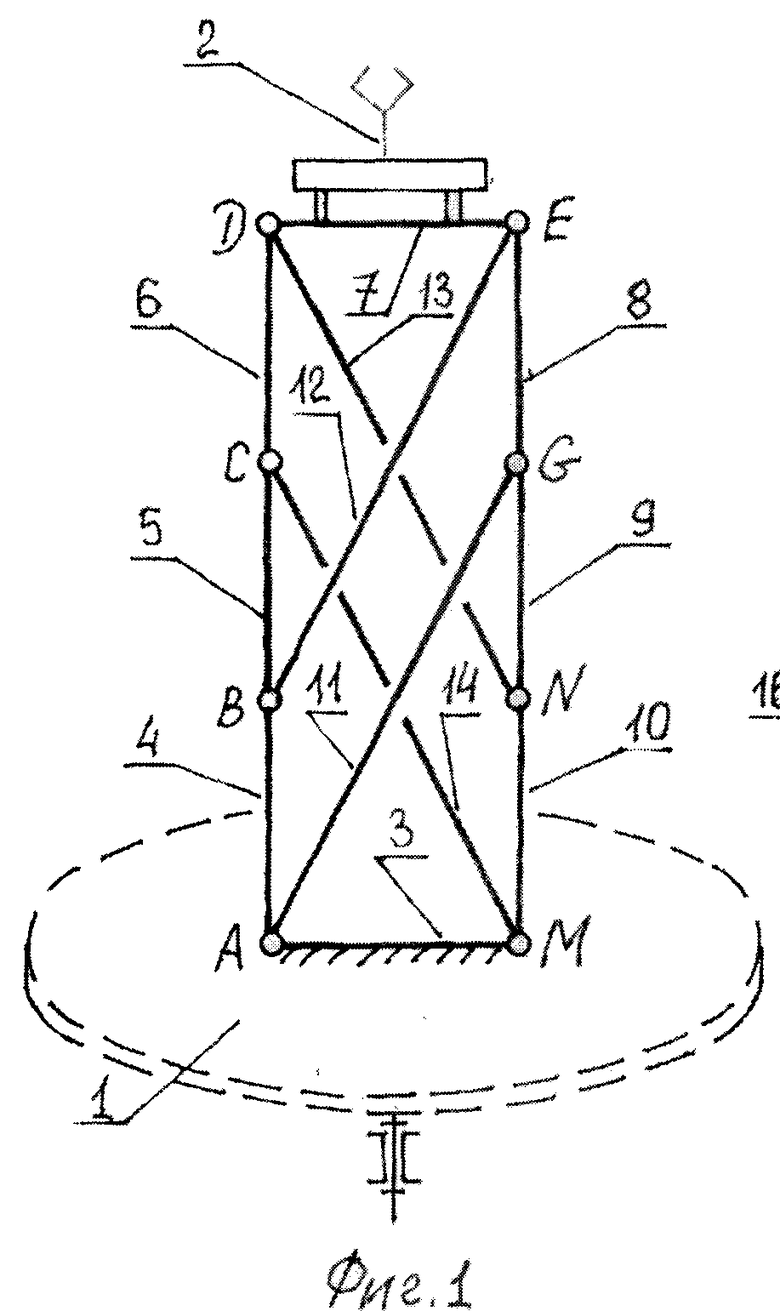
1. Шарнирный платформенный манипулятор, содержащий опорное основание и установленное на нем устройство позиционирования рабочего органа в виде приводной замкнутой шарнирно-рычажной кинематической цепи, отличающийся тем, что замкнутая шарнирно-рычажная кинематическая цепь выполнена в виде шарнирного прямоугольника, состоящего из восьми коротких двухшарнирных звеньев одинаковой длины  вершины которых попарно соединены посредством четырех попарно параллельных длинных двухшарнирных звеньев одинаковой длины
вершины которых попарно соединены посредством четырех попарно параллельных длинных двухшарнирных звеньев одинаковой длины  и восьми двойных шарниров с параллельными осями их углового поворота, а одно из коротких двухшарнирных звеньев шарнирного прямоугольника сблокировано с опорным основанием.
и восьми двойных шарниров с параллельными осями их углового поворота, а одно из коротких двухшарнирных звеньев шарнирного прямоугольника сблокировано с опорным основанием.
2. Шарнирный платформенный манипулятор по п. 1, отличающийся тем, что привод замкнутой шарнирно-рычажной кинематической цепи выполнен в виде двух приводных поворотных двигателей, соединенных с расположенными на опорном основании двумя короткими двухшарнирными звеньями и выполненных с возможностью последовательной работы, а опорное основание выполнено в виде платформы, имеющей возможность вращения от привода.
| Манипулятор | 1971 |
|
SU372885A1 |
| Манипулятор | 1973 |
|
SU460682A1 |
| Манипулятор | 1984 |
|
SU1211030A1 |
| Манипулятор | 1981 |
|
SU1038219A1 |
| US 4976582 A1, 11.12.1990 | |||
| US 7367772 B2, 06.05.2008. | |||

