Изобретение относится к машиностроению, в частности к пространственным манипуляционным механизмам с установленным на платформу рабочим органом и может найти применение в обрабатывающих центрах, сборочных конвейерах и автоматических линиях.
Известен пространственный платформенный механизм, содержащий опорное основание и привод платформы с рабочим органом, содержащий 12 сложных сферических шарниров и 6 подвижных стержневых опор, одновременно управляемых шестью приводными двигателями (книга Вульфсон И.И. и др. «Механика машин», Москва: Высшая школа, 1996, с. 28, рис. 1.20 со схемой платформы Стюарта) - аналог.
Недостатками известного пространственного платформенного механизма являются сложность конструкции, большие пространственные габариты, трудоемкость изготовления и сборки, а также сложная система управления связанной кинематикой платформы.
Наиболее близкими по технической сущности и достигаемому эффекту к предлагаемому изобретению, является пространственный платформенный манипулятор, содержащий опорной основание, подвижную платформу с рабочим органом и устройство ее привода, которые кинематически связаны между собой посредством 6 подвижных стержневых опор, содержащих 12 сложных сферических шарниров, 25 многошарнирных звеньев и 6 взаимосвязанных двигателей (книга Смелягин А.И. «Структура машин, механизмов и конструкций» / Учебное пособие. - Москва, ИНФА-М, 2019, с. 154, рис. 2.74 со схемой манипулятора с шестью степенями свободы) - прототип.
Недостатками указанного пространственного манипулятора являются сложность конструкции, большие пространственные габариты, ограниченное углами поворота сферических шарниров рабочее пространство, сложная система управления и ограниченная 6 степенями свободы маневренность подвижность платформы с рабочим органом.
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции пространственного манипулятора, обеспечении ее компактности в нерабочем положении без разборки и сборки манипулятора, увеличении рабочего пространства и упрощении системы управления.
Получение технического результата достигается за счет того, что пространственный платформенный манипулятор, включающий опорное основание, подвижную платформу с рабочим органом и устройством ее привода, кинематически связанные между собой посредством установленных вокруг подвижной платформы трех подвижных стержневых опор, каждая из которых выполнена в виде складывающейся замкнутой многозвенной кинематической цепи с вращательными кинематическими парами, состоящей из попарно скрещивающихся двухшарнирных соединительных рычагов, кинематически связанных между собой посредством цилиндрических шарниров с параллельными осями вращения соединяемых звеньев.
Сущность изобретения поясняется чертежами на фиг.1, фиг.2, фиг.3, фиг.4, фиг.5 и фиг.6.
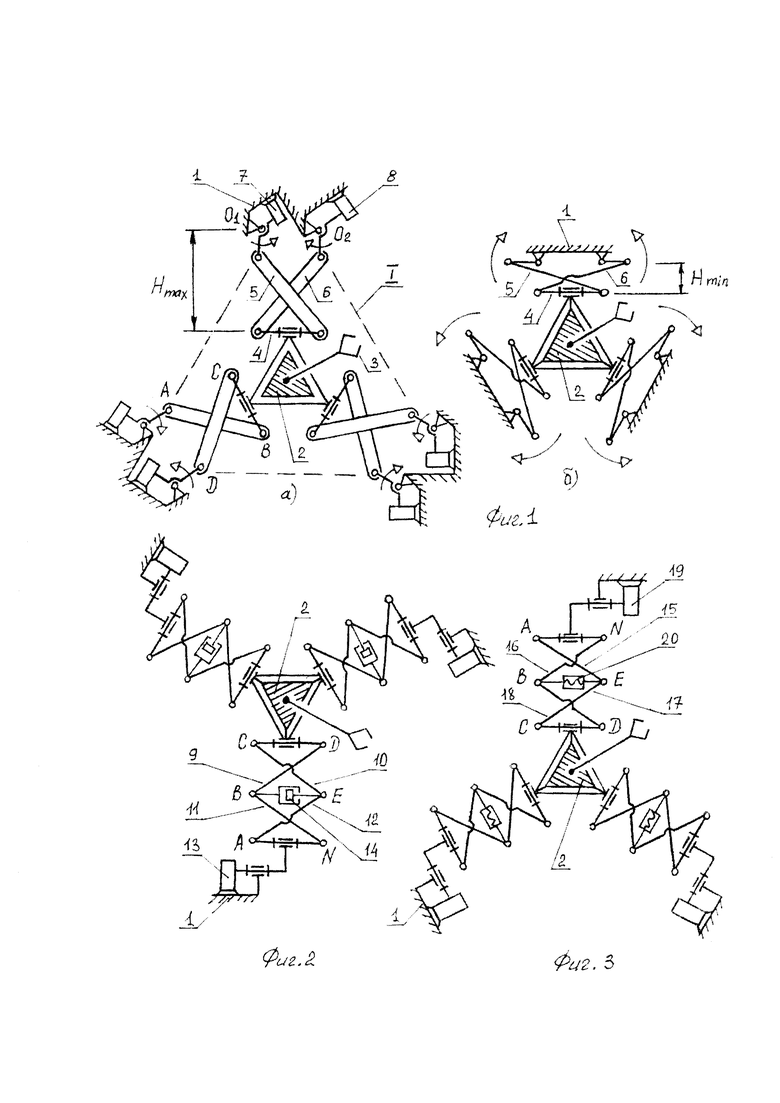
На фиг.1 изображен общий вид пространственного платформенного манипулятора, содержащего опорного основание 1 и подвижную платформу 2 с рабочим органом 3. Складывающаяся замкнутая кинематическая цепь манипулятора выполнена в виде десятизвенной пространственной структурной группы (которая на фиг.1 выделена пунктирной линией), составленной из треугольной подвижной платформы 2 и шарнирно присоединяемых к каждой из трех ее вершин промежуточных звеньев 4 с установленными на их концах двумя скрещивающимися между собой одинаковыми двухшарнирными соединительными рычагами 5 и 6, кинематически связанных с подвижной платформой 2 и с опорным основанием 1 посредством цилиндрических шарниров А, В, С и D с параллельными осями вращения соединяемых звеньев. Устройство привода подвижной платформы 1 выполнено в виде попарно установленных поворотных двигателей 7 и 8, образующих приводные вращательные кинематические пары O1 и O2 в составе каждой из трех подвижных стержневых опор для образования пространственного манипулятора с шестью степенями свободы.
На фиг.2 представлен вариант выполнения пространственного платформенного манипулятора, в котором складывающаяся замкнутая кинематическая цепь составлена из четырех попарно скрещивающихся и последовательно расположенных между собой одинаковых двухшарнирных соединительных рычагов 9, 10, 11 и 12, кинематически связанных посредством цилиндрических шарниров A, B, C, D, E и N с параллельными осями вращения.
Устройство привода подвижной платформы 2 выполнено в виде (сблокированных с каждой из установленных подвижных стержневых опор) одного установленного на опорном основании 1 поворотного двигателя 13 и одного установленного внутри кинематической цепи между скрещивающимися звеньями линейного двигателя 14, выполнено в виде подвижного гидроцилиндра для образования пространственного манипулятора с шестью степенями свободы.
На фиг.3 представлен вариант выполнения пространственного платформенного манипулятора, в котором складывающаяся замкнутая кинематическая цепь составлена из четырех попарно скрещивающихся и последовательно расположенных между собой одинаковых двухшарнирных соединительных рычагов 15, 16, 17 и 18, кинематически связанных посредством цилиндрических шарниров A, B, C, D, E и N с параллельными осями вращения. Устройство привода подвижной платформы 2 выполнено в виде (сблокированных с каждой из установленных подвижных стержневых опор) одного установленного на опорном основании 1 поворотного двигателя 19 и одного установленного внутри кинематической цепи между скрещивающимися звеньями линейного двигателя 20 в виде приводной винтовой кинематической пары для образования пространственного манипулятора с шестью степенями свободы.
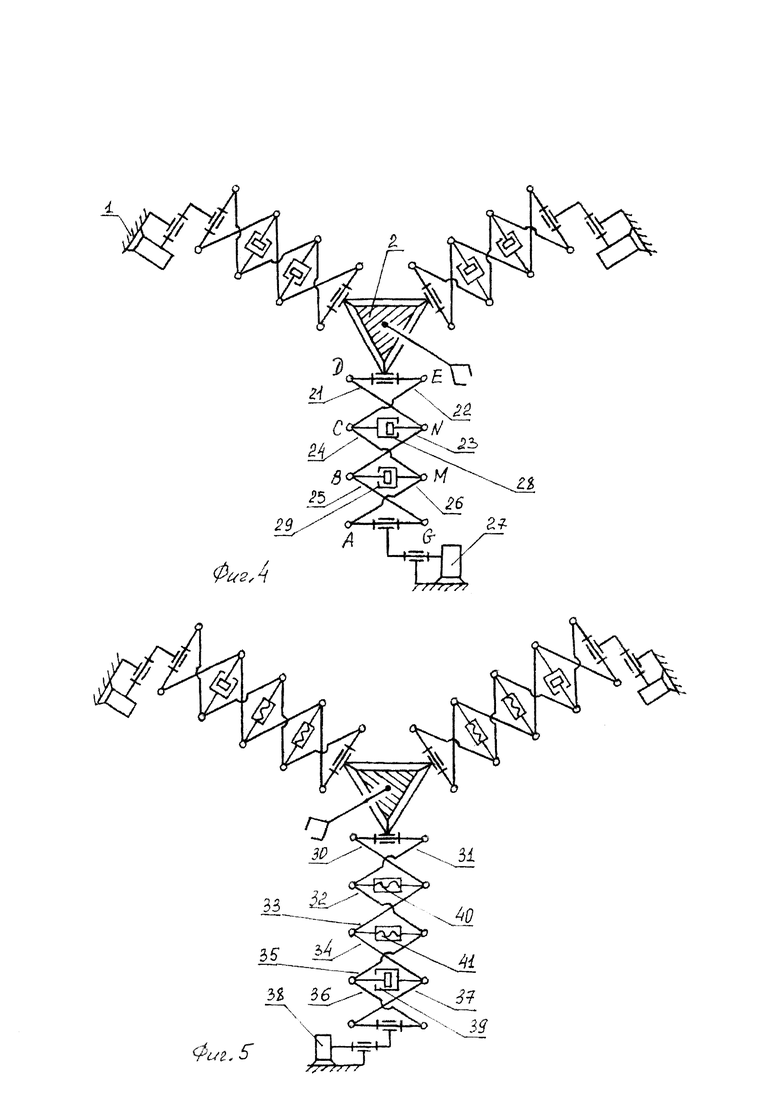
На фиг.4 представлен вариант выполнения пространственного платформенного манипулятора, в котором складывающаяся замкнутая кинематическая цепь составлена из шести попарно скрещивающихся и последовательно расположенных между собой одинаковых двухшарнирных соединительных рычагов 21, 22, 23, 24, 25 и 26, кинематически связанных посредством цилиндрических шарниров А, В, C, D, E, N, M и G. Устройство привода подвижной платформы 2 выполнено в виде трех приводных двигателей, один из которых выполнен в виде трех приводных двигателей, один из которых выполнен в виде установленного на опорном 1 поворотного двигателя 27 и двух других линейных двигателей в виде подвижных гидроцилиндров 28 и 29, установленных внутри кинематической цепи между скрещивающимися рычагами для образования пространственного манипулятора с девятью степенями свободы.
На фиг.5 представлен вариант выполнения платформенного манипулятора, в котором складывающаяся замкнутая кинематическая цепь составлена из восьми попарно скрещивающихся одинаковых двухшарнирных соединительных рычагов 30, 31, 32, 33, 34, 35, 36 и 37, а устройство привода подвижной платформы 2 выполнено в виде установленного на опорном основании одного поворотного двигателя 38 и трех установленных внутри кинематической цепи между разными парами скрещивающихся рычагов линейных двигателей, например, в виде одного гидроцилиндра 39 и двух приводных винтовых кинематических пар 40 и 41 для образования пространственного манипулятора с двенадцатью степенями свободы.
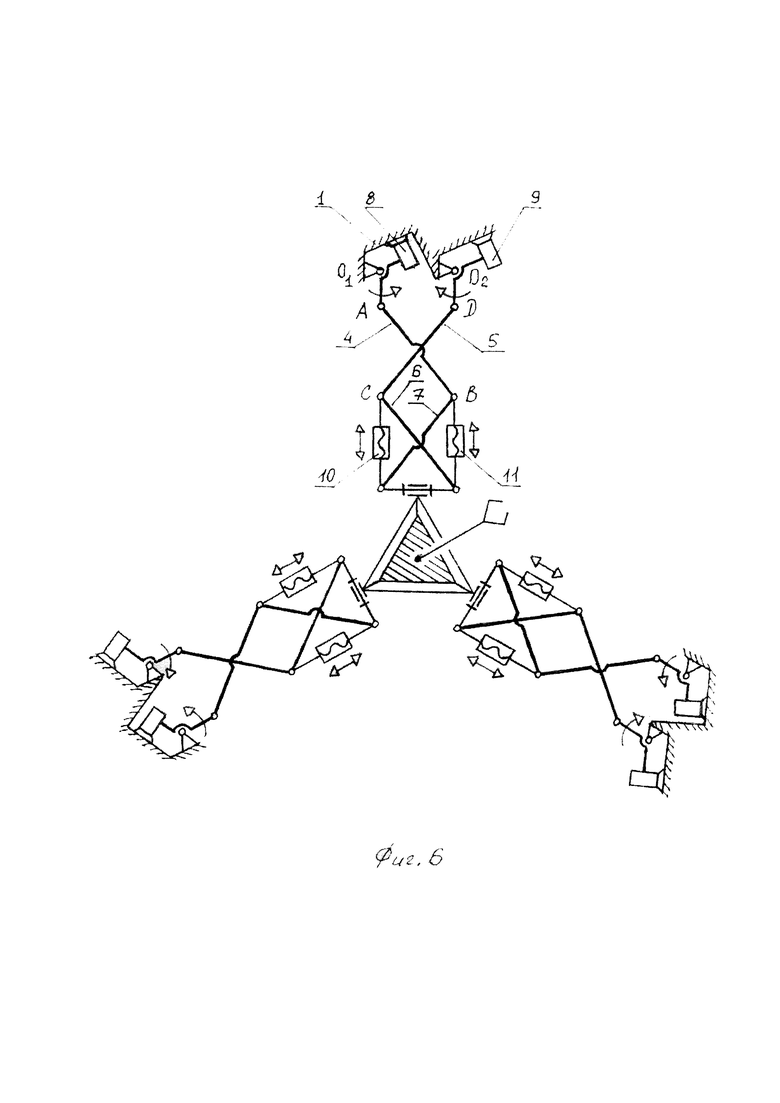
На фиг.6 представлен вариант выполнения платформенного манипулятора, в котором складывающаяся замкнутая кинематическая цепь составлена из четырех попарно скрещивающихся одинаковых двухшарнирных соединительных рычагов 4, 5, 6 и 7, а устройство привода каждой из трех установленных подвижных стержневых опор выполнена в виде расположенных на опорном сновании 1 двух поворотных двигателей 8 и 9, образующих приводные вращательные кинематические пары O1 и O2, а также двух других линейных двигателей 10 и 11 (например, в виде приводных винтовых кинематических пар), установленных снаружи кинематической цепи между скрещивающимися соединительными рычагами 6 и 7 для образования пространственного манипулятора с двенадцатью степенями свободы.
Работа представленного манипулятора заключается в следующем.
Задаваемое движение каждого из приводных двигателей приводит к пространственному (поступательному или вращательному) движению подвижной платформы с рабочим органом в расширенном (за счет увеличения до W=12 числа степеней свободы манипулятора) рабочем пространстве, а возможность складывания между собой скрещивающихся рычагов обеспечивает компактность кинематической цепи (без ее разборки и сборки в нерабочем положении) с уменьшением высоты манипулятора в (Hmax/Hmin)=5 раз (фиг.1).
Различные структурные схемы манипулятора (представленные на фиг.1 - фиг.6) можно разделить на 2 типа:
1) Для схем пространственных манипуляторов I типа (это однотипные схемы на фиг.1 и фиг.6, содержащие в каждой из трех опор по 2 поворотных приводных двигателей) число степеней свободы манипулятора (W1) можно рассчитать по следующей предложенной автором простой формуле (1)

где pх - количество подвижных стержневых опор манипулятора,
nх - число скрещивающихся соединительных двухшарнирных рычагов в каждой из подвижных стержневых опор.
Пример 1. Для манипулятора (фиг.1) по формуле (1): W1 = pх * nх = 3 * 2 = 6.
Пример 2. Для манипулятора (фиг.6) по формуле (1): W1 = pх * nх = 3 * 4 = 12.
2) Для схем пространственных манипулятор II типа (это однотипные схемы на фиг.2, 3. 4 и 5 с одним приводным поворотным двигателем в каждой из pх=3 подвижных стержневых опор) число степеней свободы манипулятора (W2) можно рассчитывать по следующей другой предложенной автором простой формуле (2)

Пример 1. Для манипулятора (фиг.2 и 3) по формуле (2)  .
.
Пример 2. Для манипулятора (фиг.4) по формуле (2)  .
.
Пример 3. Для манипулятора (фиг.5) по формуле (2)  .
.
Примечание
Все рассчитанные значения W (W=6, W=9, W=12), а также работоспособность, управляемость и многократная складываемость различных конструктивных схем манипулятором (представленных на фиг.1, фиг.2, фиг.3, фиг.4, фиг.5 и фиг.6) подтвержден экспериментально на их изготовленных действующих моделях.
Достигаемый в предлагаемом пространственном платформенном манипулятора положительный эффект заключается в следующем:
1. Упрощение конструкции за счет применения простых цилиндрических шарниров с параллельными осями вращения.
2. Расширение рабочего пространства и маневренности рабочего органа манипулятора за счет увеличения до W=12 числа степеней свободы.
3. Снижение габаритов манипулятора по высоте в (Hmax/Hmin)=5 раз в его нерабочем положении при транспортировке и хранении на складе (без разборки и сборки всей конструкции).
4. Упрощение системы управления пространственным платформенным манипулятором за счет его раздельной кинематики движений платформы с рабочим органом.
5. Увеличение до W=12 числа степеней свободы и маневренности подвижной платформы манипулятора без увеличения количества его подвижных стержневых опор, т.е. при использовании минимального числа опорных ног манипулятора, равного трем.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАТФОРМЕННЫЙ РОБОТ | 2020 |
|
RU2751778C1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758391C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ИЗБЫТОЧНЫМ ПРИВОДОМ | 2021 |
|
RU2782460C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2758607C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ТРЕХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2774279C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758374C1 |
| ПРОСТРАНСТВЕННО-ПЛОСКИЙ ПЛАТФОРМЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2781602C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2758377C1 |
Изобретение относится к машиностроению, в частности к пространственным манипуляционным механизмам с установленным на платформу рабочим органом, и может быть использовано в обрабатывающих центрах, сборочных конвейерах и автоматических линиях. Манипулятор содержит опорное основание и подвижную платформу с рабочим органом и устройством ее привода. Платформа кинематически связана с опорным основанием посредством трех подвижных стержневых опор, установленных вокруг платформы. Каждая из стержневых опор выполнена в виде имеющей возможность складывания замкнутой многозвенной кинематической цепи с попарно скрещивающимися двухшарнирными соединительными рычагами. Рычаги кинематически связаны с опорным основанием и с подвижной платформой посредством цилиндрических шарниров с параллельными осями вращения. В результате обеспечивается упрощение конструкции манипулятора, его компактность в нерабочем положении без разборки и сборки и увеличение рабочего пространства. 6 з.п. ф-лы, 6 ил.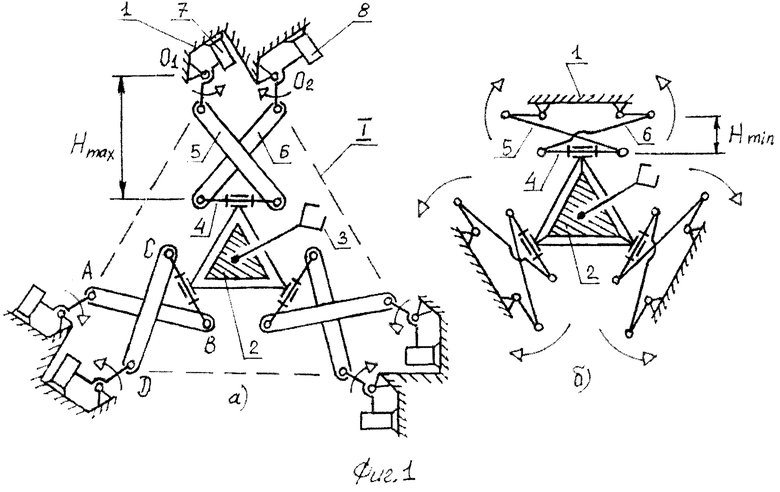
1. Пространственный платформенный манипулятор, содержащий опорное основание и подвижную платформу с рабочим органом и устройством ее привода, кинематически связанную с опорным основанием посредством подвижных стержневых опор, отличающийся тем, что он содержит три подвижные стержневые опоры, установленные вокруг подвижной платформы, при этом каждая из упомянутых подвижных стержневых опор выполнена в виде имеющей возможность складывания замкнутой многозвенной кинематической цепи с попарно скрещивающимися двухшарнирными соединительными рычагами, кинематически связанными с опорным основанием и с подвижной платформой посредством цилиндрических шарниров с параллельными осями вращения.
2. Манипулятор по п. 1, отличающийся тем, что подвижная платформа выполнена треугольной, замкнутая кинематическая цепь состоит из шарнирно присоединенных к одной из вершин подвижной платформы промежуточных звеньев с установленными на их концах двумя скрещивающимися между собой одинаковыми двухшарнирными соединительными рычагами, а устройство привода подвижной платформы выполнено в виде попарно установленных поворотных двигателей, образующих приводные вращательные кинематические пары в каждой подвижной стержневой опоре с обеспечением шести степеней свободы пространственного манипулятора.
3. Манипулятор по п. 1, отличающийся тем, что замкнутая кинематическая цепь состоит из четырех попарно скрещивающихся и последовательно расположенных одинаковых двухшарнирных соединительных рычагов, а устройство привода подвижной платформы выполнено в виде сблокированных с каждой из трех подвижных стержневых опор поворотного двигателя, установленного на опорном основании, и расположенного внутри замкнутой кинематической цепи между скрещивающимися звеньями линейного двигателя в виде подвижного гидроцилиндра с обеспечением шести степеней свободы манипулятора.
4. Манипулятор по п. 1, отличающийся тем, что замкнутая кинематическая цепь состоит из четырех попарно скрещивающихся и последовательно расположенных одинаковых двухшарнирных соединительных рычагов, а устройство привода подвижной платформы выполнено в виде сблокированных с каждой из трех подвижных стержневых опор поворотного двигателя, установленного на опорном основании, и расположенного внутри замкнутой кинематической цепи между скрещивающимися соединительными рычагами линейного двигателя в виде приводной винтовой кинематической пары с обеспечением шести степеней свободы манипулятора.
5. Манипулятор по п. 1, отличающийся тем, что замкнутая кинематическая цепь состоит из шести попарно скрещивающихся и последовательно расположенных одинаковых двухшарнирных соединительных рычагов, а устройство привода подвижной платформы выполнено в виде одного поворотного приводного двигателя и двух линейных приводных двигателей для каждой из трех подвижных стержневых опор, при этом поворотный приводной двигатель установлен на опорном основании, а линейные двигатели выполнены в виде подвижных гидроцилиндров, установленных внутри кинематической цепи между парами скрещивающихся соединительных рычагов с обеспечением девяти степеней свободы манипулятора.
6. Манипулятор по п. 1, отличающийся тем, что замкнутая кинематическая цепь состоит из восьми попарно скрещивающихся и последовательно расположенных одинаковых двухшарнирных соединительных рычагов, а устройство привода подвижной платформы выполнено в виде одного поворотного двигателя и трех линейных двигателей для каждой из трех подвижных стержневых опор, при этом поворотный двигатель установлен на опорном основании, а три линейных двигателя установлены внутри кинематической цепи между разными парами скрещивающихся соединительных рычагов с обеспечением двенадцати степеней свободы манипулятора.
7. Манипулятор по п. 1, отличающийся тем, что замкнутая кинематическая цепь состоит из четырех попарно скрещивающихся одинаковых двухшарнирных соединительных рычагов, а устройство привода подвижной платформы выполнено в виде двух поворотных двигателей и двух линейных двигателей для каждой из трех подвижных стержневых опор, при этом поворотные двигатели расположены на опорном основании, а линейные двигатели установлены снаружи кинематической цепи между попарно скрещивающимися двухшарнирными соединительными рычагами с обеспечением двенадцати степеней свободы манипулятора.
| ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ VIP-МАНИПУЛЯТОР | 2019 |
|
RU2722165C1 |
| ПНЕВМОМЕХАНИЧРХКИЙ ЗАЖИМ | 0 |
|
SU164757A1 |
| СПОСОБ ПОЛУЧЕНИЯ гуминовых кислот | 0 |
|
SU198352A1 |
| US 7367772 B2, 06.05.2008 | |||
| US 4976582 A1, 11.12.1990. | |||

