пряжения и блок фиксации состояний, первый выход которого подключен к первому входу блока формирования адреса микрокоманды, выход которого соединен с входом блока управления, первый выход которого подключен к первым входам блока сопряжения, блока фиксации состояний, блока формирования адреса подобласти, арифметического блока, блока отслеживания временных границ, блока отслеживания пространственных границ и блока формирования траектории соответственно, вход-выход блока сопряжения подключен ко входу-выходу устройства. Первый выход блока сопрянсения соединен со вторыми входами арифметического блока блока формирования траектории, блока отслеживания пространственных границ, блока отслеживания временных границ и блока формирования адреса микрокоманды, третий вход которого подключен к выходу блока памяти. Второй блок блока памяти соединен со вторым выходом блока сопряжения, второй вход которого подключен к выходу блока памяти, третий вход которого соединен с выходом блока формирования адреса подобласти. Второй вход последнего нодключен к нервым выходам блока формирования траектофии и блока отслеживания пространственных границ, третий вход которого соединен со вторым выходом блока формирования траектории, третий вход которого подключен к второму выходу блока фиксации состояний, второй и третий входы которого соединены со вторым выходом блока отележивания пространственных границ и выходом блока отслеживания временных границ соответственно. Третий выход блока формирования траектории подключен к третьему входу арифметического блока, выход которого соединен с третьим входом блока сопряжения, четвертый вход которого подключен к первому выходу блока формирования траектории. Второй выход блока управления соединен с четвертым входом блока формирования адреса микрокоманды.
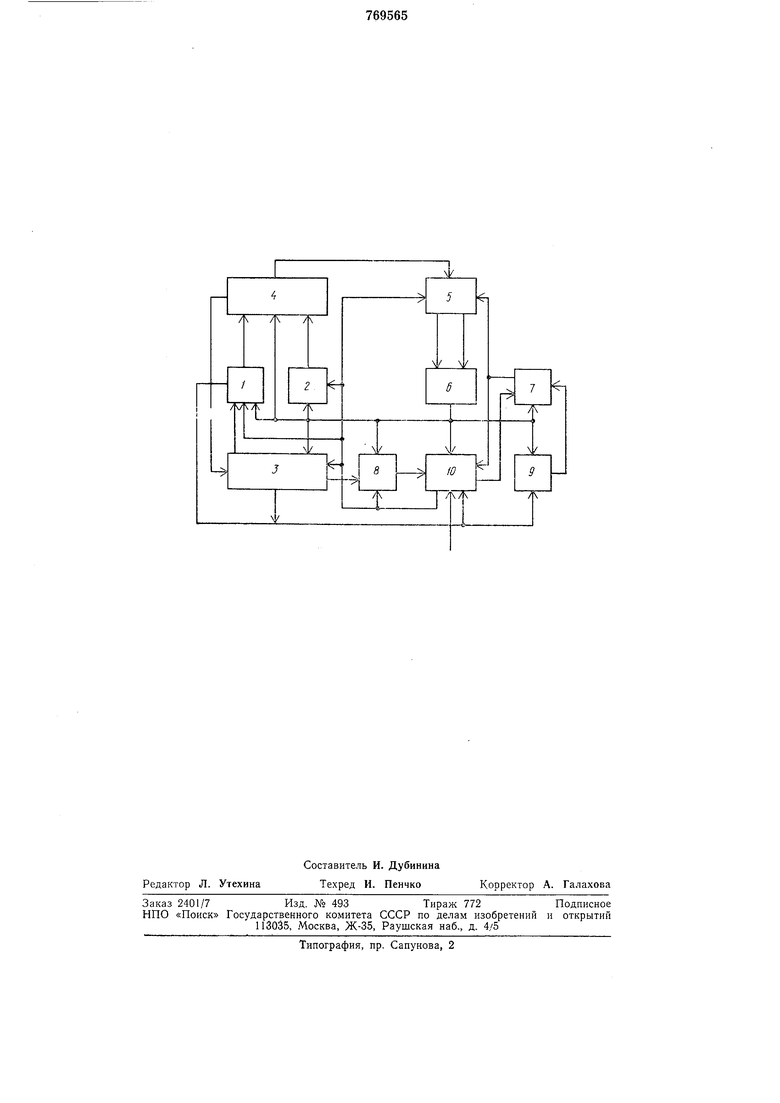
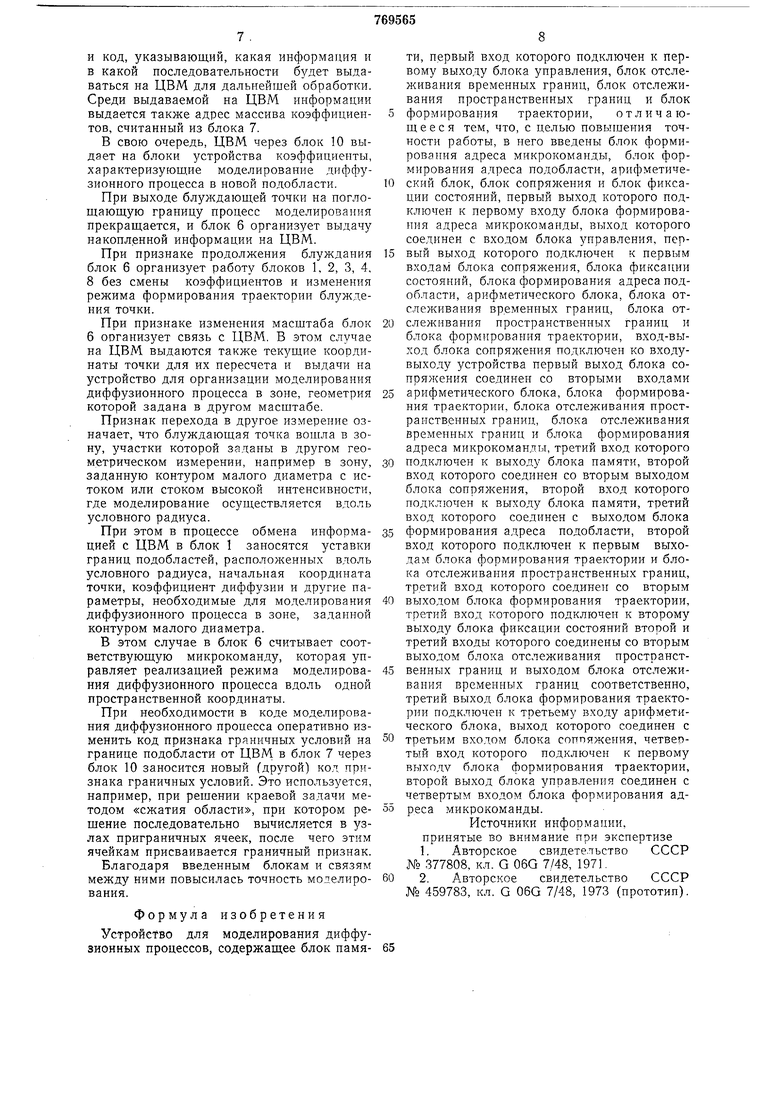
На чертеже приведена структурная схема устройства. Оно содержит блок 1 отслеживания прострапственных границ, блок 2 отслеживания временных границ, блок 3 формирования траектории, блок 4 фиксации состояний, блок 5 формирования адреса микрокоманды, блок 6 управления, блок памяти 7, арифметический блок 8, блок 9 формирования адреса подобласти, блок 10 сопряжения.
В блок 1 перед началом процесса моделирования в аналоговом виде задается информация о геометрии произвольной формы исследуемой области и ее подобластей, измеряемых двумя пространственными координатами, в цифровом виде задаются уставки слоев по третьей координате, а также уставки границ подобластей для моделирования диффузионного нроцесса по одной координате.
При моделировании диффузионных процессов блок 1 осуществляет отслеживание заданных прострапственных границ.
В блок 2 задаются исходные данные о временных параметрах (границах) моделирования, и в процессе моделирования осуществляется отслеживание этих временных границ.
Блок 3 в соответствии с исходными данными формирует траекторию точки, случайным образом блуждающей в пространстве с шагом пропорциональным коэффициенту диффузии.
Блок 4 принимает известительные сигналы от блоков 1 и 2, извещающих о пересечении точкой пространственных или временных границ исследуемой подобласти постоянства параметров, вырабатывает при этом сигнал останова для запрета формирования траектории, а также формирует код призпака останова, который поступает в блок 5.
Блок 5 в соответствии с данными на его входе формирует адрес микрокоманды, поступающий в блок 6. В блоке 6 считываются соответствующие микрокоманды, управляющие функционированием устройства в различных режимах моделирования диффузионных процессов, отработки граничных условий, а также обмена информацией с ЦВМ.
Блок 7 осуществляет хранение начальных адресов массивов коэффициентов подобластей постоянства параметров, а также кодов признаков, определяющих поведение точки в исследуемой подобласти.
Блок 8 производит накопление правых частей рещаемого уравнения от траектории диффузионного процесса.
Блок 9 в зависимости от режима процесса моделирования и вида задания исследуемой подобласти осуществляет идентификацию положения точки в пространстве с кодом подобласти при входе блуждающей точки в эту подобласть.
Блок 10 организует обмен информацией между ЦВМ и блоками устройства, выдачу на ЦВМ кодов состояния устройства и накопленной информации, которую необходимо выдать на ЦВМ при соответствующем коде состояния в процессе моделирования диффузионного процесса или после его окончания.
Устройство работает следующим образом.
От ЦВМ через вход-выход 11 и блок 10 сопряжения передается исходная числовая информация для моделирования диффузионного нроцесса. При этом начальные координаты точки, составляющие сноса и коэффициент диффузии заносятся в блок 3 формирования траектории; уставки слоев на третьей координате заносятся в блок 1 отслеживания пространственных границ; временные параметры моделирования (временной интервал, время моделирования и время жизни точки, а также интенсивность времени моделирования и интенсивность времени жизни точки) ностунают в блок 2 Отслеживания временных границ; приращения нравых частей решаемого уравнения от траектории моделируемого диффузионного нронесса записываются в арифметический блок 8; код режима моделирования лиффузионного нроцесса заносится в блок 5 формирования адреса микрокоманд.
По окончании занесения исходной информации блок 10 сопряжения формирует сигнал запуска, который поступает в блок 5 формирования адоеса микрокоманд. Блок 5 в зависимости от кода режима моделирования формирует адрес соответствующей микрокоманды, который поступает в блок 6 управления.
В блоке 6 считывается код микрокоманды, содержапшй управляющую часть и код условия перехода. Код микрокоманды в зависимости от режима моделирования настраивает на нужный режим работы и запускает блоки 3, 1, 2, 4 и 8.
В соответствии с принятой исходной информацией и кодом управляющего слова микрокоманды блок 3 организует формирование траектории путем блуждания точки в исследуемой подобласти постоянства параметров с щагом, пропорциональным коэффициенту диффузии и с учетом составляющих сноса.
Каждой подобласти постоянства параметров присвоен код, который определяется кодом цвета регулярной ячейки, кодом номера слоя или сочетанием указанных кодов. Код цвета характеризует исследуемую подобласть, заданную границами произвольной формы по первой и второй координатам, код регулярной ячейки определяет подобласть, аппроксимированную регулярной решеткой по первой и второй координатам, код номера слоя характеризует подобласть, границы КОТОРОЙ заданы уставкамтт слоев по третьей координате.
Помимо пространственных границ подобласть постоянства параметров определяется также временными границами (границами временного интервала, временем моделирования и временем жизни точки).
Каждой подобласти постоянства параметров также присвоен код признака, который определяет поведение блуждающей точки в данной подобласти и хранится в блоке 7.
Блок 1 отслеживает выход точки за пространственные границы подобласти постоянства параметров, блок 2 отслеживает временные границы.
При пересечении блуждающей точкой пространственных или временных границ исследуемой подобласти блок I и или блок 2 формирует соответствующие сигналы. В первом случае блок 1 извещает блок 4 о
пересечении пространственных границ, что определяется изменением кода цвета, кОлТ,а регулярной ячейки или кода номера слоя. Во втором случае соответствующий сигнал на выходе блока 2 указывает, что в процессе моделирования диффузионного нроцесса закончились временной интервал, время моделирования или время жизни точки. Эти сигналы запоминаются в блоке 4. При этом блок 4 вырабатывает сигнал, поступающий в блок 3 и запрещающий дальнейщее формирование траектории блуждания точки. Одновременно на выходе блока 4 в соответствии с сигналами от блоков 1 и 2 формируется код признака останова, который поступает в блок 5.
В соответствии с кодом признака останова от блока 4, кодом режима моделирования, хранящимся в блоке 5, и кодом условия перехода, поступающим от блока 6, блок 5 формирует адрес следующей микрокоманды, поступающий в блок 6. В блоке 6 считываются микрокоманды, по которым в блоке 9 текущее положение блуждающей точки идентифицируется с кодом подобласти, в которую эта точка вошла. Идентификация производится путем формирования в зависимости от режима моделирования кода подобласти из текущих кодов цвета, регулярной ячейки, координат и номера слоя.
По этому коду из блока 7 памяти считываются код признака граничных условий и адрес массива коэффициентов.
Код признака граничных условий определяет поведение блун дающей точки на границе новой подобласти, например, отражение, преломление, ноглощение, продолл ение блуждения, изменение масщтаба, переход в другое измерение и т. д.
Адрес массива коэффициентов является начальным адресом внешней памяти, в которой хранятся коэффициенты (исходные данные), характеризующие моделирование диффузионного процесса в новой подобласти.
В зависимости от режима моделирования и кода признака граничных условий, поступивщего от блока 7, блок 5 формирует адрес соответствующей микрокоманды, которая считывается в блоке б и организует дальнейщую работу устройства.
Так при отражении блок 3 настраивается на режим работы, при котором блуждающая точка до окончан1тя шага блуждания соверщает движение в обратном направлении.
При преломлении блок б организует связь устройства с ЦВМ с целью выдачи на нее накопленной информации и получения новых исходных данных для продоллсения процесса моделировання в новой подобласти. В этом случае на ЦВМ из блока 10 первым словом выдается информация, содержащая в себе код состояния устройства
7 .
и код, указывающий, какая информация и в какой последовательности будет выдаваться на ЦВМ для дальнейшей обработки. Среди выдаваемой на ЦВМ информации выдается также адрес массива коэффициентов, считанный из блока 7.
В свою очередь, ЦВМ через блок 10 выдает на блоки устройства коэффициенты, характеризующие моделирование диффузионного процесса в новой подобласти.
При выходе блуждающей точки на поглощающую границу процесс моделирования прекращается, и блок 6 организует выдачу накопленной информации на ЦВМ.
При признаке продолжения блуждания блок 6 организует работу блоков 1, 2, 3, 4, 8 без смены коэффициентов и изменения режима формирования траектории блуждения точки.
При нризнаке изменения масштаба блок б ооганизует связь с ЦВМ. В этом случае на ЦВМ выдаются также текущие координаты точки для их пересчета и выдачи на устройство для организации моделирования диффузионного процесса в зоне, геометрия которой задана в другом масштабе.
Признак перехода в другое измерение означает, что блуждающая точка вошла в зону, участки которой заданы в другом геометрическом измерении, например в зону, заданную контуром малого диаметра с истоком или стоком высокой интенсивности, где моделирование осуществляется вдоль условного радиуса.
При этом в процессе обмена информацией с ЦВМ в блок 1 заносятся уставки границ подобластей, расположенных вдоль условного радиуса, начальная координата точки, коэффициент диффузии и другие параметры, необходимые для моделирования диффузионного нроцесса в зоне, заданной контуром малого диаметра.
В этом случае в блок б считывает соответствующую микрокоманду, которая унравляет реализацией режима моделирования диффузионного процесса вдоль одной пространственной координаты.
При необходимости в коде моделирования диффузионного процесса оперативно изменить код признака граничных условий на границе нодобласти от ЦВМ в блок 7 через блок 10 заносится новый (другой) код признака граничных условий. Это используется, например, при решении краевой задачи методом «сжатия области, при котором рещение последовательно вычисляется в узлах приграничных ячеек, после чего этим ячейкам присваивается граничный признак.
Благодаря введенным блокам и связям между ними повысилась точность моделирования.
Формула изобретения
Устройство для моделирования диффузионных процессов, содержащее блок памя- 65
ти, первый вход которого подключен к первому выходу блока управления, блок отслеживания временных границ, блок отслеживания пространственных границ и блок формирования траектории, отличающееся тем, что, с целью повышения точности работы, в iero введены блок формирования адреса микрокоманды, блок формирования адреса подобласти, арифметический блок, блок сопряжения и блок фиксации состояний, первый выход которого подключен к первому входу блока формирования адреса микрокоманды, выход которого соединен с входом блока управления, первый выход которого подключен к первым входам блока сопряжения, блока фиксации состояний, блока формирования адреса подобласти, арифметического блока, блока отслеживания временных границ, блока отслеживания пространственных границ и блока формирования траектории, вход-выход блока сопряжения подключен ко входувыходу устройства первый выход блока сопряжения соединен со вторыми входами
арифметического блока, блока формирования траектории, блока отслеживания пространственных границ, блока отслеживания временных границ и блока формирования адреса микрокоманды, третий вход которого
подключен к выходу блока памяти, второй вход которого соединен со вторым выходом блока сопряжения, второй вход которого подключен к выходу блока памяти, третий вход которого соединен с выходом блока
формирования адреса нодобласти, второй вход которого подключен к первым выходам блока формирования траектории и блока отслеживания пространственных границ, третий вход которого соединен со вторым
выходом блока формирования траектории, третий вход которого подключен к второму выходу блока фиксации состояний второй и третий входы которого соединены со вторым выходом блока отслеживания пространственных границ и выходом блока отслеживания временных границ соответственно, третий выход блока формирования траектории подключен к третьему входу арифметического блока, выход которого соединен с
третьим входом блока соппяжения, четвертый вход которого подключен к первому выходу блока формирования траектории, второй выход блока управления соединен с четвертым входом блока формирования адреса микрокоманды.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № .377808, кл. G 06G 7/48, 1971.
2. Авторское свидетельство СССР № 459783, кл. G 06G 7/48, 1973 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для решения краевых задач | 1977 |
|
SU752381A1 |
| Устройство для моделирования многомерных диффузионных процессов | 1980 |
|
SU926684A1 |
| Устройство для моделирования случайных блужданий | 1981 |
|
SU999063A1 |
| Вероятностное устройство для решения краевых задач | 1982 |
|
SU1101838A1 |
| Устройство для моделирования многомерных диффузионных процессов | 1973 |
|
SU459783A1 |
| Устройство для сопряжения абонентов с ЦВМ | 1985 |
|
SU1278863A1 |
| Вероятностное вычислительное устройство для решения трехмерных краевых задач | 1978 |
|
SU767785A1 |
| УСТРОЙСТВО КОНЦЕНТРИЧЕСКОГО БЛУЖДАНИЯ | 1973 |
|
SU383054A1 |
| Устройство обработки информации для радионавигационных систем | 1983 |
|
SU1144116A1 |
| Устройство для решения краевых задач | 1983 |
|
SU1149286A1 |