1
Изобретение относится к области судостроения, в частности к способам кренования судов.
По основному авт.св.№385814 известен способ кренования судов, пре- 5 имущественно плавучих кранов, путем наклонения судна- крен-балластом, наклонение плавкрана производят поворотом стрелы с борта на борт вначале без груза, а затем - с грузом на га- 10 ке 1.
Известный способ кренования судов является трудоемким процессом.
Цель изобретения - снижение трудоемкости способа кренования и повыше- 15 ние точности за счет уменьшения массы груза.
Цель достигается тем, что по предлагаемому способу наклонение плавкрана производят поворотом стрелы крана 20 с грузом, при этом отношение веса груза к грузоподъемности плавкрана принимают в пределах 0,12-0,30.
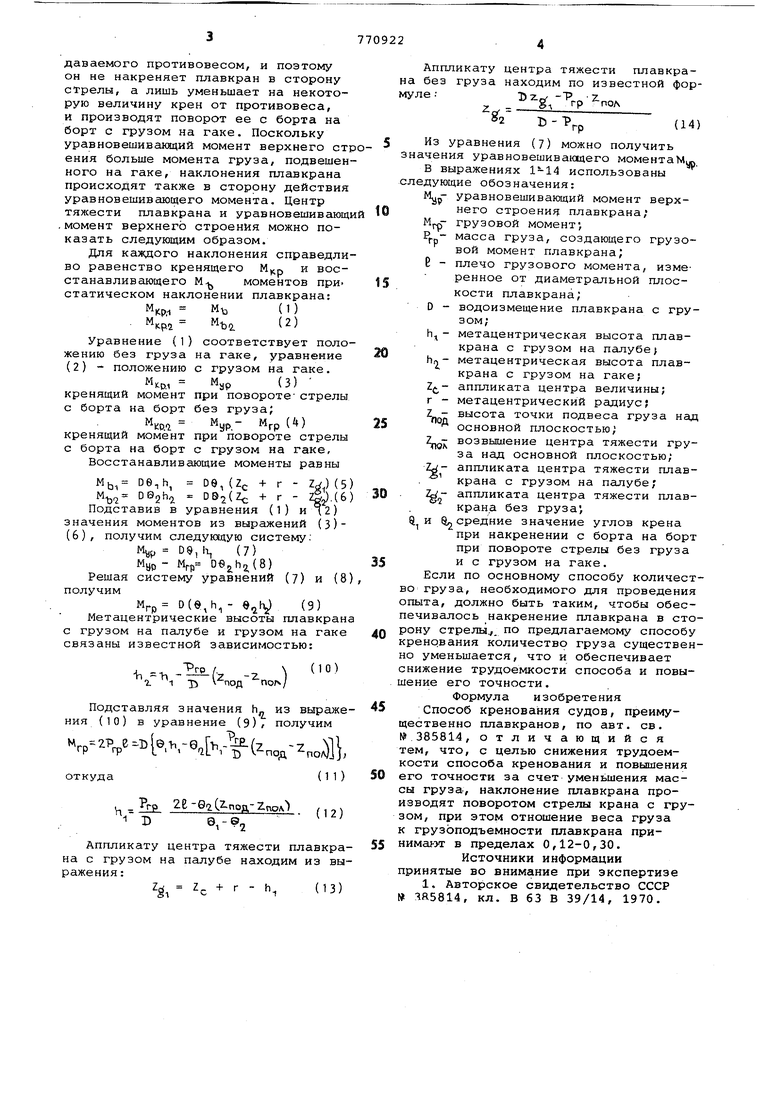
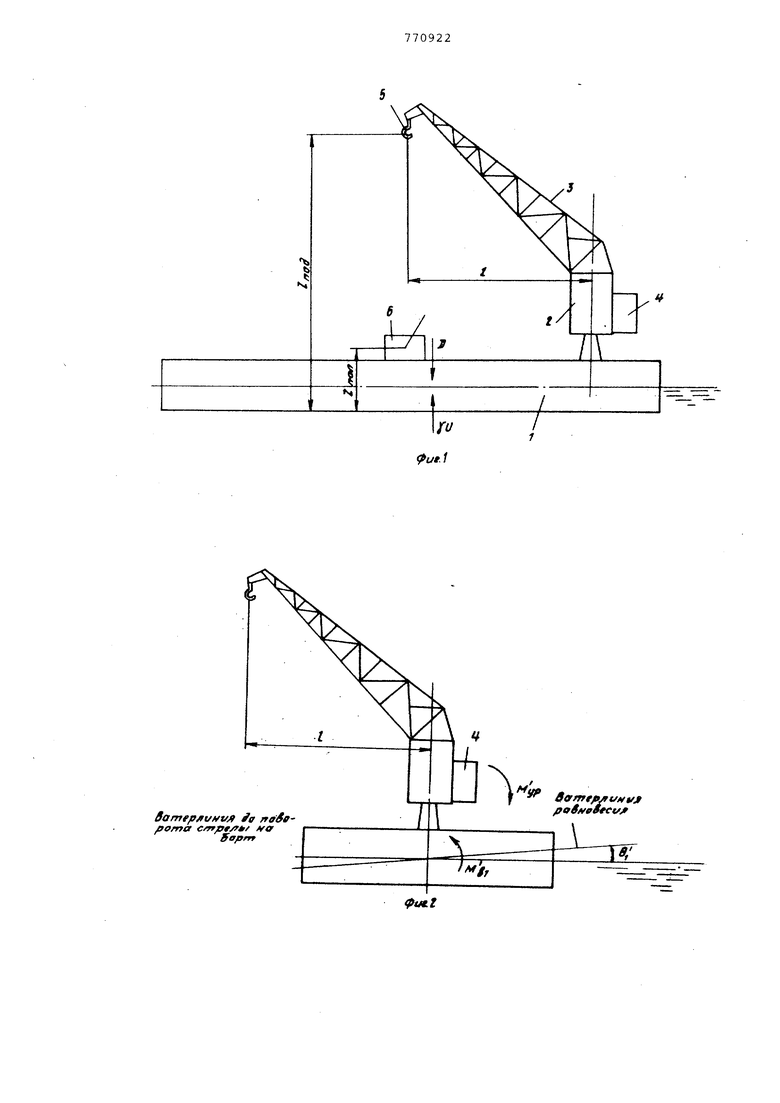
На фиг. 1 изображен плавкран,вид сбоку, показано верхнее строение кра-25 на с противовесом и стрелой, развернутой вдоль понтона; на фиг. 2 - то же, с кормы, стрела крана без груза на гаке развернута на борт, плавкран накренен в сторону противовеса; на
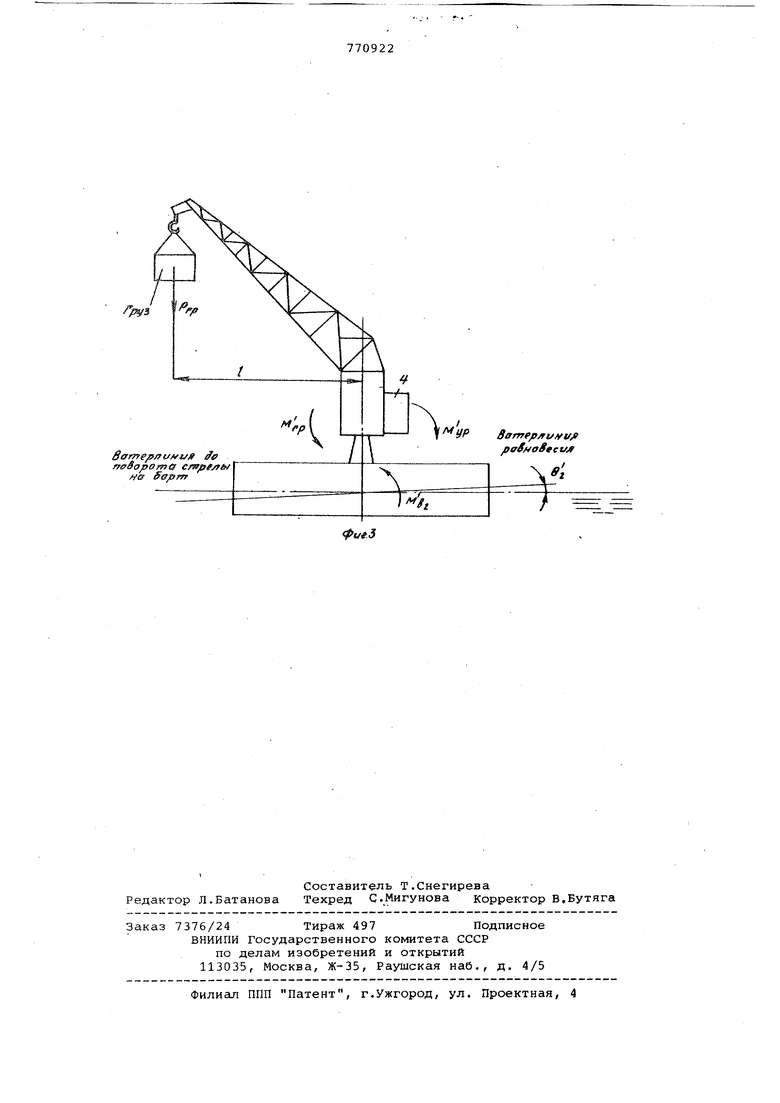
фиг, 3 - то же, стрела крана с гру- . зом на гаке развернута на борт.
Плавкран содержит понтон I, на котором смонтировано верхнее строение 2 со стрелой 3 и противовесом 4, на конце стрелы имеется гак 5 с грузом 6.
Груз устанавливается на палубе в диаметральной плоскости плавкрана под гаком.На плавкран в диаметральной его плокости действуют две уравновешивающие друг друга силы: сила тяжести плавкрана О и сила поддержания (архимедова сила) V
Поскольку в данном положении на плавкран не действуют никакие кренящие моменты, крен у плавкрана отсутствует ,
Следует отметить, что пцрожение равновесия плавкрана описывается системой двух уравнений: уравнением действующих на него сил и уравнением моментов этих сил. Сила тяжести плавкрана с принятым на борт грузом О и сила поддержания V на всем протяжении опыта остаются неизменными.
При неизменном вылете стрелы производят поворот ее с борта на борт без груза на гаке, затем на гаке стрелы подвешивается груз такой массы, что его момент меньше момента, создаваемого противовесом, и поэтому он не накреняет плавкран в сторону стрелы, а лишь уменьшает на некоторую величину крен от противовеса, и производят поворот ее с борта на борт с грузом на гаке. Поскольку уравновешиваюций момент верхнего стрения больше момента груза, подвешенного на гаке, наклонения плавкрана происходят также в сторону действия уравновешивающего момента. Центр тялсести плавкрана и уравновешивающ .момент верхнего строения можно показать следующим образом.
Для каждого наклонения справедливо равенство кренящего Му-р и восстанавливающего M-jj моментов при статическом наклонении плавкрана:
(1)
Мхз
|СР,1
:2) М+
чра )QL Уравнение {1) соответствует положению без груза на гаке, уравнение (2) - положению с грузом на гаке.
(з:
м
м,
.1 ар кренящий момент при повороте-стрелы
с борта на борт без груза;
М,р,, МУР- ИГР с) кренящий момент при повороте стрелы с борта на борт с грузом на гаке. Восстанавливающие моменты равны
°® DQ,(ZC + г - z)(5
М 002 DS2(2 + г - Z§j).(6 Подставив в уравнения (1) и 12) значения моментов из выражений (З) (6), получим следующую систему: D9, ill (7) МИР - МГР De,)
Решая систему уравнений (7) и (8 получим
Мрр D($,h - (9) Метацентрические высоты плавкран с грузом на палубе и грузом на гаке связаны известной зависимостью:
(10)
.( nofl noJ
Подставляя значения h из выражения (10) в уравнение (9), получим
M,p..,v,,-e,b/(z,,-z,4l.
откуда(11)
V, - Р, Эт.С под-гпол) 2)
D .
Аппликату центра тяжести плавкрана с грузом на палубе находим из выражения:
Zg Zj. + г - h (13)
Аппликату центра тяжести плавкрабез груза находим по известной фор ,
ь--р
14)
-Р
5 Из уравнения (7) можно получить значения уравновешиваюдего моментам
Ур.
В выражениях 1-14 использованы следующие обозначения:
Мур- уравновешивающий момент верхQ него строения плавкрана; Мф- грузовой момент-, Р - масса груза, создающего грузовой момент плавкрана; В - плечо грузового момента, измег ренное от диаметральной плоскости плавкрана;
D - водоизмещение плавкрана с грузом;
h., - метацентрическая высота плавд крана с грузом на палубе;
Ьл- метацентрическая высота плавкрана с грузом на гаке; аппликата центра величины; г - метацентрический радиус; Z - высота точки подвеса груза над 5 f основной плоскостью;
- возвышение центра тяжести груза над основной плоскостью;
Ч - аппликата центра тяжести плавкрана с грузом на палубе; 0 Т аппликата центра тяжести плавкрана без груза , Q и §„средние значение углов крена
при накренении с борта на борт при повороте стрелы без груза 5 и с грузом на гаке.
Если по основному способу количество груза, необходимого для проведения опыта, должно быть таким, чтобы обеспечивалось накренение плавкрана в стол рону стрельа. по предлагаемому способу кренования количество груза существенно уменьшается, что и обеспечивает снижение трудоемкости способа и повышение его точности.
Формула изобретения
5 Способ кренования судов, преимущественно плавкранов, по авт. св. № 385814, отличающийся тем, что, с целью снижения трудоемкости способа кренования и повышения 0 его точности за счет уменьшения массы груза, наклонение плавкрана производят поворотом стрелы крана с грузом, при этом отнсяпение веса груза к грузоподъемности плавкрана при5 нимаг-эт в пределах 0,12-0,30. Источники информации принятые во внимание при экспертизе
1, Авторское свидетельство СССР № ЯЯ5814, кл. В 63 В 39/14, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КРЕНОВАНИЯ СУДОВ | 1973 |
|
SU385814A1 |
| Способ кренования судов | 1980 |
|
SU927640A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА СУДНА И АППЛИКАТЫ ЕГО ЦЕНТРА ТЯЖЕСТИ | 2011 |
|
RU2466900C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА СУДНА И АППЛИКАТЫ ЕГО ЦЕНТРА ТЯЖЕСТИ | 2012 |
|
RU2499722C1 |
| Способ кренования плавсредства | 1981 |
|
SU979198A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КРЕНОВАНИЯ СУДНА | 2012 |
|
RU2522671C1 |
| СПОСОБ ТЕКУЩЕГО КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2021 |
|
RU2767563C1 |
| Способ кренования самоподъемных плавучих буровых установок | 1982 |
|
SU1030242A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕТАЦЕНТРИЧЕСКОЙ ВЫСОТЫ СУДНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2240254C1 |
| Прибор для измерения остойчивости | 1990 |
|
SU1815654A1 |
ffarrrejp/n/f/vA /a ffaSffpoma c/rrpf/rtr/ va Sa/arrr SomtMUMVjt of/ fffCVJ
