(54) УСТРОЙСТВО ДЛЯ СНЯТИЯ ХАРАКТЕРИСТИКИ ДИНАМИЧЕСКОЙ ИНДУКТИВНОСТИ
t
Изобретение относится к электротехнике и позволяет производить снятие динамических характеристик опытным путем, в частности, подзволяет снимать характеристику индуктивности 5 электромагнитных элементов постоянного тока при срабатывании в зависимости от пути.
Известно устройство для снятия динамических характеристик электромаг- 10 нитов, содержащее датчик перемещения якоря и вычислительную схему 1.
Известны также устройства для снятия динамических характеристик содержащие тензодатчик перемещения ря и вычислительную схему 2 и
Наиболее близким к предлагаемому является устройство для снятия динамических характеристик, содержащее датчик положения якоря, вычислитель- 20 ную схему и электроннолучевой осциллограф 4.
Однако из-за того, что датчик положения якоря размещен на подвижной части магнитной систеки, происходит 25 увеличение массы самого якоря, особенно существенное при незначительной массе самого якоря, что в свою очередь создает значительные погрешности при построении характеристик 30
индуктивности электромагнитного элемента постоянного тока.
Цель изобретения - повышение точности изме1 ений и надежности.
Это достигается тем, что датчик положения якоря выполнен в виде элемента Холла и предназначен для размещения на неподвижном сердечнике, в устройство введено шунтирующее сопротивление и источник питания, предназначенные для подключения к обмотке возбуждения электромагнитного элемента постоянноготока, а вычислительная схема выполнена в виде дифференциру}зщей и интегрирующей цепочки и двух блоков деления, при этом нагрузочная цепь элемента Холла подключена на один из входов первого блока деления, второй вход которого связан с шунтирующим соспротивлением, а выход с интегрирующей цепочкой, вь:-ход которой, в свою очередь, связан с одним из входов электроннолучевого осциллографа, другой вход этого осциллографа подключен на выход второго блока деления, к одному входу блока деления подключен выход дифференцирующей цепочки, вход которой связан с шунтирующим сопротивлением, другой вход второго блока деления связан с источником и шунтирующим сопротивлением,
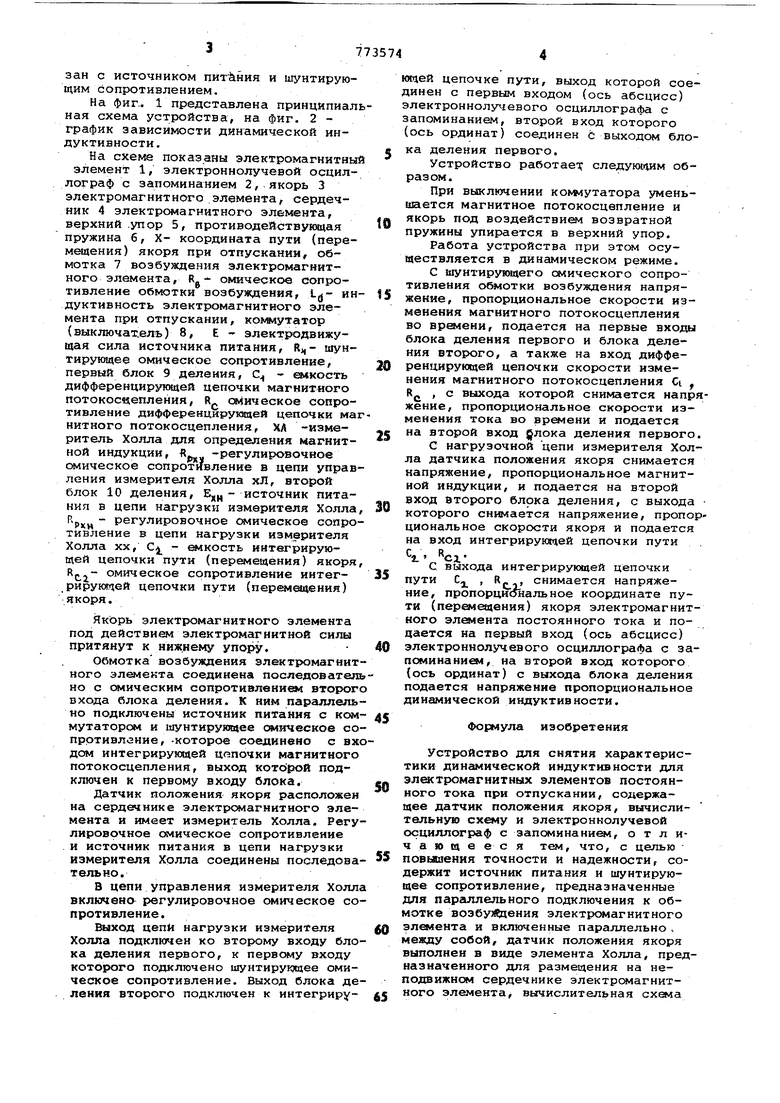
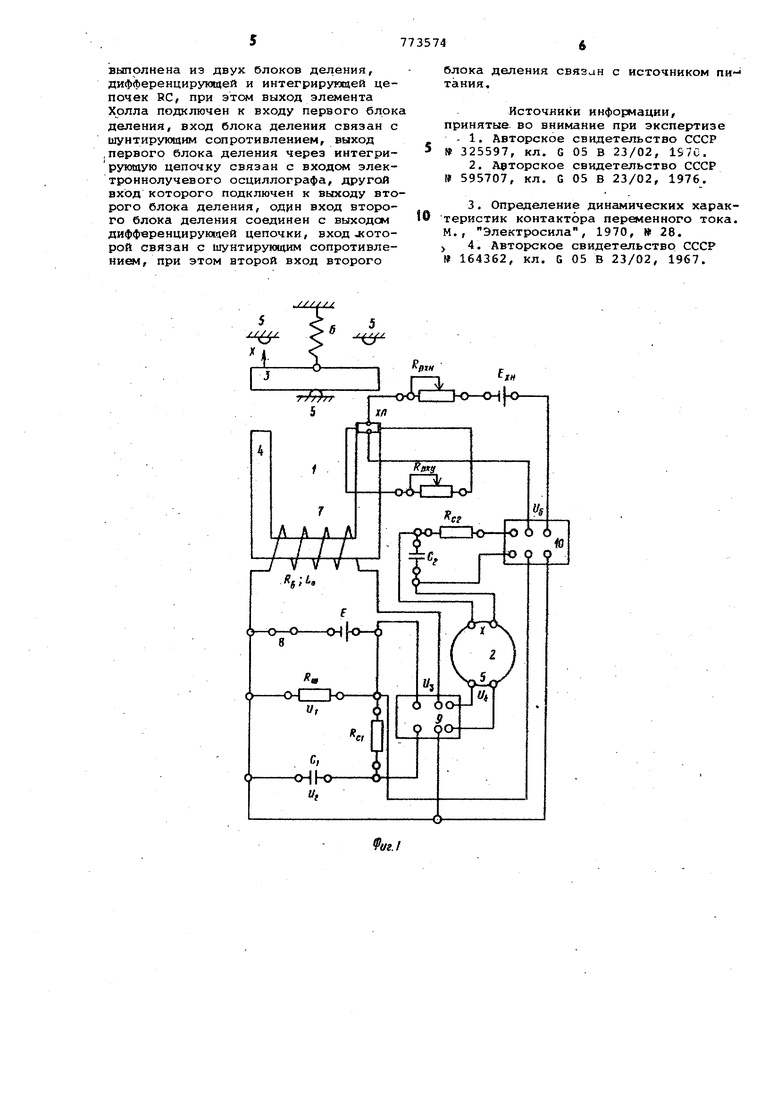
На фиг.. 1 представлена принципиальная схема устройства, на фиг. 2 график зависимости динамической индуктивности.
На схеме показаны электромагнитный элемент 1, электроннолучевой осциллограф с запоминанием 2, якорь 3 электромагнитного элемента, сердечник 4 электромагнитного элемента, верхний .упор 5, противодействукадая пружина 6, Х- координата пути (перемещения) якоря при отпускании, обмотка 7 возбуждения электромагнитного элемента, R-- омическое сопротивление обмотки возбуждения, индуктивность электромагнитного элемента при отпускании, колвлутатор (выктеочателъ) 8, Е - электродвижущая сила источника питания, Rj,- шунтирующее омическое сопротивление, первый блок 9 деления, С - емкость дифференцирующей цепочки магнитного потокос«5еплениЯ| ft смическое сопротивление дифференцирующей цепочки магнитного потокосцепления, ХА -измеритель Холла для определения магнитной индукции, -регулировочное омическое сопротивление в цепи управления измерителя Холла хЛ, второй блок 10 деления, - источник питания в цепи нагрузки измерителя Холла, Rpj - регулировочное О1ическое сопротивление в цепи нагрузки измерителя Холла XX, С - илкость интегрирующей цепочки пути (перемещения) якоря, Rj, - омическое сопротивление интегрирующей цепочки пути (перемещения) якоря.
Якорь электромагнитного элемента под действием электромагнитной силы притянут к нижнему упору.
Обмотка возбуждения электромагнитного элемента соединена последовательно с с ическим сопротивлением второго входа блока деления. К ним параллельно подключены источник питания с коммутатором и шунтирунедее омическое сопротивление, -которое соединено с входом интегрирующей цепочки магнитного потокосцепления, выход которой подключен к первому входу блока.
Датчик положения якоря расположен на сердечнике электрсмагнитиого элемента и имеет измеритель Холла, Регулировочное смическое сопрютивление и источник питания в цепи нагрузки измерителя Холла соединены последовательно.
В цепи управления измерителя Холла включена регулировочное омическое сопротивление.
Выход цепи нагрузки измерителя Холла подключен ко второму входу блока деления первого, к первому входу которого подключено шунтирукмее омическое сопротивление. Выход блока деления второго подключен к интегрирующей цепочке пути, выход которой соединен с первым входом (ось абсцисс) электроннолучевого осциллографа с запоминанием, второй вход которого (ось ординат) соединен С выходом бло« ка деления первого.
Устройство работает; следую1г1им образ ом.
При выключении коммутатора уменьшается магнитное потокосцепление и якорь под воздействием возвратной пружины упирается в верхний упор.
Работа устройства при этом осуществляется в динамическом режиме.
С шунтирующего омического сопротивления обмотки возбуждения напряжение, пропорциональное скорости изменения магнитного потокосцепления во времени, подается на первые входы блока деления первого и блока деления второго, а также на вход дифференцирующей цепочки скорости изменения магнитного потокосцепления Ci , RJ, , с выхода которой снимается напряжение, пропорциональное скорости изменения тока во времени и подается 5 на второй вход лока деления первого. С нагрузочной цепи измерителя Холла датчика положения якоря снимается напряжение, пропорциональное магнитной индукции, и подается на второй вход второго блока деления, с выхода которого снимается напряжение, пропорциональное скорости якоря и подается на вход интегрирующей цепочки пути
г. а
С выхода интегрирующей цепочки
пути
и С , , снимается напряже, пропорциональное координате пуние,
ти (перв оаения) якоря электромагнитного элемента постоянного тока и подается на первый вход (ось абсцисс)
0 электроннолучевого осциллографа с запоминанием, на второй вход которого {ось ординат) с выхода блока деления подается напряжение пропорциональное динамической индуктивности.
Формула изобретения
Устройство для снятия характеристики динамической индуктивности для эл тромагнитных элементов постоянного тока при отпускании, содержащее датчик положения якоря, вычислительную схему и электроннолучевой осциллограф с запс 1инаниетл, отличающееся тем, что, с целью повьшения точности и надежности, содержит источник питания и шунтирующее сопротивление, предназначенные для парашлельного подключения к обмотке возбу ения электрс)агнитного элемента и включенные параллельно . между собой, датчик положения якоря выполнен в виде элемента Холла, предназначенного для размещения на неПОДВИЖНСЯМ1 сердечнике электромагнитного элемента, вычислительная схема
выполнена из двух блоков деления, дифференцирующей и интегрирующей цепочек ЙС, при этом выход элемента Холла подключен к входу первого блок деления, вход блока деления связан с шунтирующим сопротивлением, выход ,первого блока деления через интегрирующую цепочку связан с входом электроннолучевого осциллографа, другой вход которого подключен к выходу второго блока деления, один вход второго блока деления соединен с выходсзм диффвренцируЮ1аей цепочки, вход лоторой связан с шунтирующим сопротивленио, при этом второй вход второго
блока деления связан с источником питания.
Источники информации, принятые во внимание при экспертизе
- 1, Авторское свидетельство СССР 325597, кл. G 05 В 23/02, 1S7C.
2. Арторское свидетельство СССР 595707, кл. G 05 В 23/02, 1976.
3. Определение динамических характеристик контактора переменного тока. М., Электросила, 1970, 28. у 4. Авторское свидетельство СССР № 164362, кл. G 05 В 23/02, 1967.