I
Изобретение относится к электротех-5 нике и применяется для определения характеристики динамической индуктивности электромагнитных элементов постоянного тока при отпускании шунтированием обмотки возбуждения.
Известны устройства для снятия динамических характеристик, содержащее датчик перемещения якоря и вычислительную схему Г1 Известны также устройства для снятия динамических характеристик, содержащие тензодатчик перемещения якоря и вычислительную схему Г и З.
Наиболее близким к предлагаемому .. по технической сущности является устройство для снятия динамических характери- ристик, содержащее датчик положения якоря, вычислительную схему и электроннолучевой осциллограф с запоминанием ,0
.
Однако из-за того, что датчик положения якоря размещен на подвижной .части магнитной системы, происходит увеличение массы, самого якоря, особенно существенное при незначительной его массе, что в свою очередь создает погрешности при построении характеристикииндуктивности электромагнитного элемента постоянного Тока. . .
Цель изобретения - повышение точности измерений и надежности устройства.
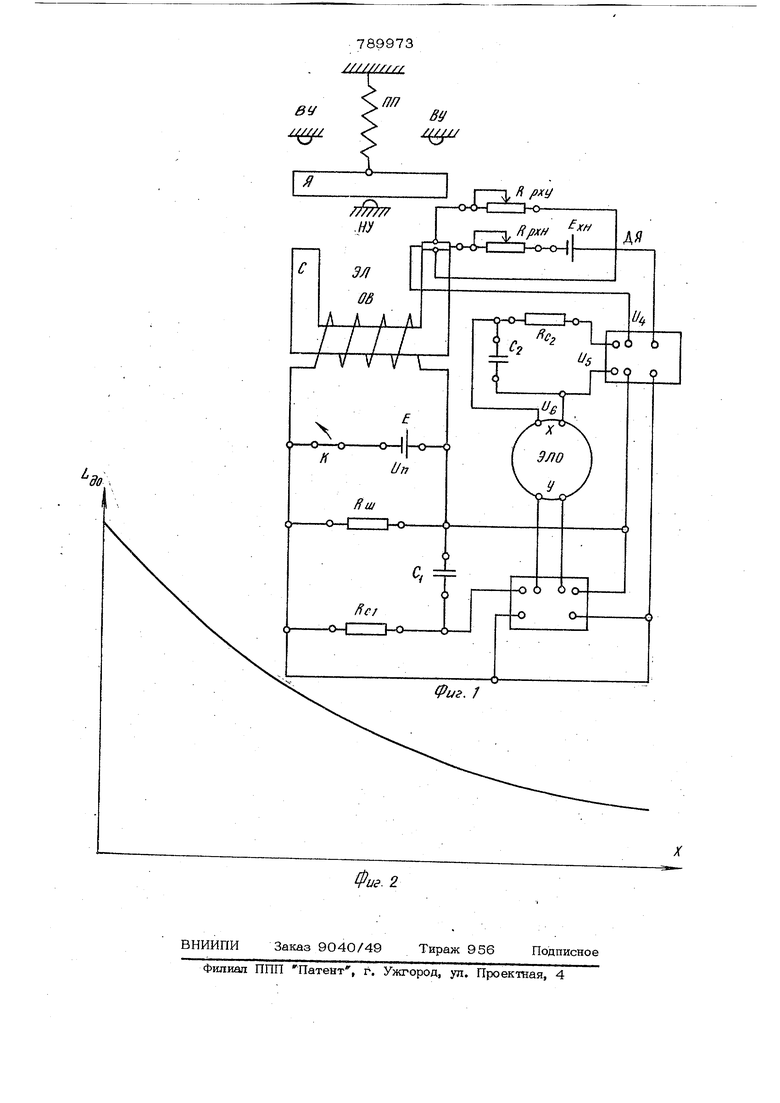
Цель достигается тем, что в устройство введены источник питания и шунтирующий резистор, соединенные между собой параллельно и предназначенные для подключения к обмотке возбуждения электромагнитного элемента постоянного тока, датчик положения якоря выполнен в виде элемента Холла, а вычислительная схемав виде двух блоков деления и дифференцирующей и интегрирующей RC-цепей, при этом вход элемента Холла подключен к автономному источнику питания, а выход - ко входу одного из блоков деления, который своим выходом через интегрирующую RC-цепь подключен к одному из входов электроннолучевого осциллографа с запоминанием, к другому входу этого же блока деления подключен вход другого блока деления, другой вход последнего подключен к выходу дифференцирующе НС-цепи, а выход - к другому входу электронно-ппучевого осциллографа с запо минанием, при этом вход.дифференцирующей цепи подключен параллельно шунтирующему резистору. На фиг. 1 дана принципиальная схема устройства; на фиг. 2 - примерный вид характеристики. . Устройство состоит из электромагнит ного элемента постоянного тока ЭЛ дифферендирующей цепочки скорости изменения магнитного потокосцепления Т. Ц , первого блока деления , датчика Положения якоря ДЯ, второго блока деления, интегрирующей цепочки пути Про Cjj и электроннолучевого осциллографа с запоминанием ЭЛО. Кроме того устройство содержит Я - якорь электромагнитного элемента, С - сердечник электромагнитного элемен та, ВУ - верхний упор, НУ - нижний упор, ПП - противодействующую пружину, ОВ - обмотку возбуждения электромагнитного элемента, К - коммутатор (выключатель, I -шунтирующее омическое сопротивление, С - емкость дифференцирующей цепочки скорости изменени магнитного потокосцепления, RCJ омическое сопротивление дифференцирующей цепочки скорости изменения магнитного потокосцепления, R: регулировочное омическое сопротивление в цепи управле ния измерителя Холла, ЕЧ,., - источник питания в цепи нагрузки измерителя лол ла, Rpyu - регулировочное сопротивление в цепи нагрузки измерителя Холла, Cij - емкость дифференцирующей цепочки скорости изменения магнитного потоко- сцепления, Rco омическое сопротивление дифференцирующей цепочки скорости изменения магнитного потокосцепления, источник питания. Описание устройства в статике такое Якорь электромагнитного элемента притянут к нижнему упору. К обмотке возбуждения параллельно подключены источник питания и шунтирующее омичес кое сопротивление. Шунтирующее омическое, сопротивле.ние подключено на вход дифференцирующей цепочки.скорости изменения магнит ного потокосцепления, второй вход первого блока деления (динамической индук т.ивности) и первый вход второго блока деления (скорости). Датчик положения якоря с измерителем Холла расположен на сердечнике. Регулировочное омическое сопротивление и источник питания в цепи нагрузки измерителя Холла соединены последовательно. В цепи управления измерителя Холла включено регулировочное омическое сопротивление. Нагрузочная цепь измерителя Холла включена на второй вхсд второго блока деления. Выход второго блока деления соединен с выходом интегрирующей цепочки пути . Выход интегрирующей цепочки пути соединен с первым входом (ось абсцисс) электроннолучевого осциллографа с запоминанием. Выход первого блока деления подключен на второй вход (ось ординат) электроннолучевого осциллографа с запоминанием. Устройство работает следующим образом. При выключении коммутатора начинает уменьшаться магнитное потокосцепление и якорь электромагнитного элемента под воздействием возвратной пружины начинает отходить от нижнего упора к верхнему упору. При этом работа устройства происходит в динамическом режиме и описывается уравнениями динамики. С шунтирующего омического сопротивления снимается напряжение, пропорциональное скорости магнитного пото- косцепления во времени, и подается на первые входы первого блока деления динамической индуктивности деления второго блока, а также на вход дифференцирующей цепочкимагнитного потокосцепления , с выхода которой снимается напряжение, пропорциональное скорости изменения тока рбмотки возбуждения ОВ электромагнитного элемента постоянного тока ЭЛ и подается на второй вход первого блока деления. С нагрузочной цепи измерителя Холла датчика положения якоря ДЯ снимается напряжение, пропорциональное магнитной индукции и подается на второй вход второго блока деления с выхода которого снимается напряжение, пропорциональное скорости якоря интегрирующей цепочки путиЙ С, с выхода которой снимается напряжение, пропорциональное координате пути (перемещения) якоря электромагнитного элемента постоянного тока ЭЛ и подается на первый вход (ось абсцисс) электроннолучевого осциллографа с запоминанием ЭЛО, на второй вход котороГх (ось ординат) с выхода делителя динамической индуктивности подается напряжение, пропорциональное динамической индуктивности электромагнитных элементов при отпусканий шунтированием обмотки возбуждения. Формула изобретения
Устройство для снятия характеристики динамической индуктивности для электромагнитных элементов постоянного тока при отпускании шунтированием обмотки возбуждения, содержащее датчик псшожения якоря, вычислительную схему и электроннолучевой осциллограф с запоминанием, отличающееся тем, что, с целью повышения точности и надежности, содержит источник питания и шунтирующий резистор, включенные между собой параллельно и предназначенные для подключения к обмотке возбуждения, датчик положения якоря выполнен в виде элемента Холла, а вычислительная схема - в виде двух блоков деления, дифференцирующей и интегрирующей RC-iienoH, при этом вход элемента Холла подключен к автономному источнику питания, а выход - ко входу одного блока деления, который своим выходом через интегрирующую J C-цепь связан с одним из входов осциллографа, к другому входу этого же блока деления подключен вход другого блока деления, другой вход последнего подключен к вы-
ходу дифференцирующей RC-цепи, а выход - к другому входу электроннолучевого осциллографа с запоминанием, при этом вход дифференцирующей цепи подключен параллельно шунтирующему резистору.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 325597, кл. q 05 В 23/02, 1970.
2. Авторское свидетельство СССР
№ 595707, кл. Q 05 В 23/02, 1976.
3. Определение динамических характеристик контакта переменного тока, М., Электросила, 1970, № 28.
4. Авторское свидетельство СССР
№ 164362, кл. g 05 В 23/02, 1963.