(54) ПРЕОБРАЗСВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД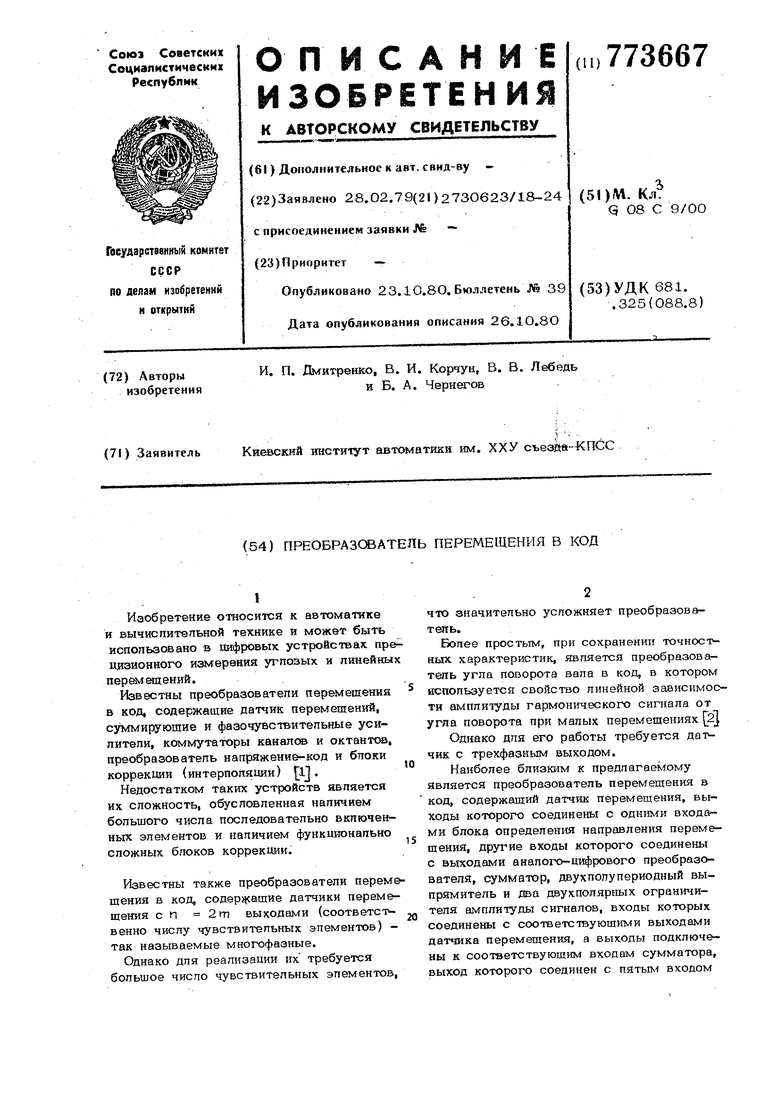

| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь перемещение-код | 1974 |
|
SU510732A1 |
| Фазометр | 1990 |
|
SU1797076A1 |
| Преобразователь сигналов датчиков переменного тока | 1986 |
|
SU1332531A1 |
| Преобразователь значения коэффициента модуляции амплитудно-модулированного сигнала | 1986 |
|
SU1337830A1 |
| Кодирующий преобразователь | 1989 |
|
SU1755376A1 |
| Устройство для регистрации ресурса машин | 1989 |
|
SU1711210A1 |
| Грозопеленгатор-дальномер | 1984 |
|
SU1201790A1 |
| Преобразователь перемещений в код | 1983 |
|
SU1111188A1 |
| Суммирующие конвейерные весы | 1983 |
|
SU1117455A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ НАПРЯЖЕНИЯ ПЕРЕМЕННОГО ТОКА В КОД | 2001 |
|
RU2195767C1 |
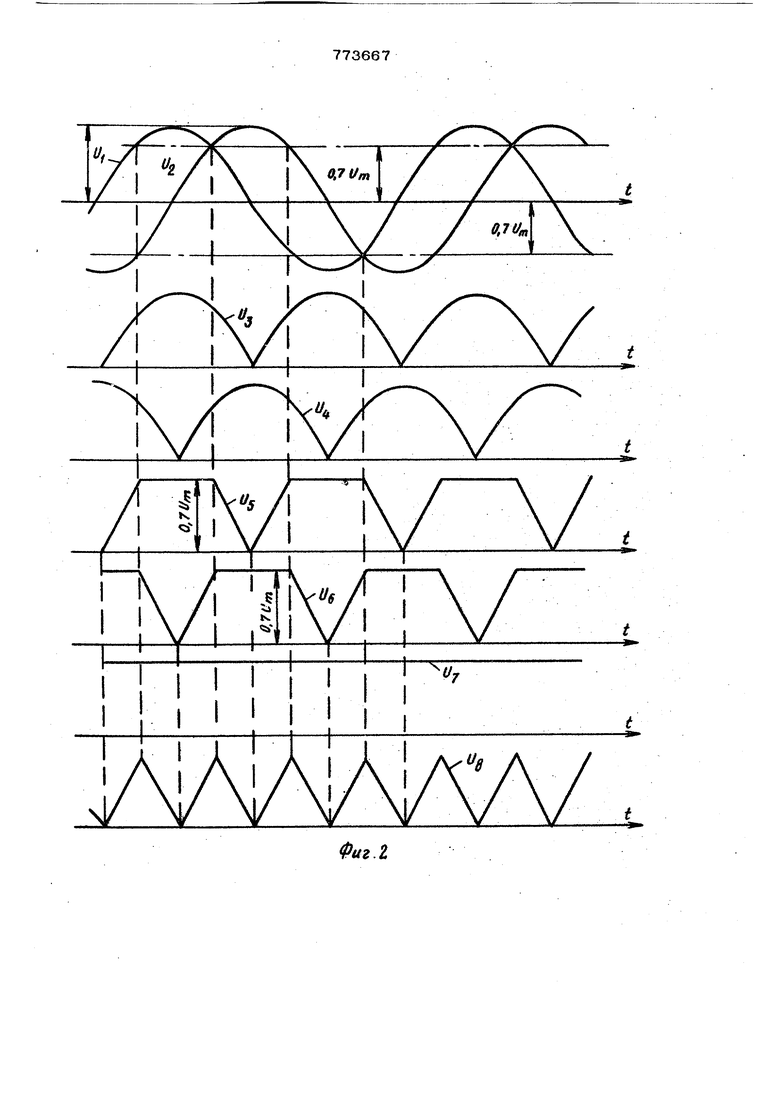


Изобретение относится к автоматике и вычислительной технике и может быть использовано в цифровых устройствах пр& дизионного измерения угпозых и линейны перемещений. Известны преобразователи перемешений в код, содержащие датчик перемещений, суммирующие и фазочувствитепьные усилители, коммутаторы канапе и октанте®, преобразователь напряжение-код и блоки коррекции (интерпопяини) рЛ. Недостатком таких устройств является их сложность, обусловленная наличием большого числа последовательно включенных элементов и наличием функционально сложных блоков коррекции. Известны также преобразователи переме щения в код, содерч а1дие датчики перемещения СП 2т выходами (соответс-гвенно числу чувствительных элементов) так называемые многофазные. Однако для реализации их требуется большое число чувствительных элементов. что значительно усложняет преобразователь. Более простым, при сохранении точностных характеристик, является преобразователь угла поворота вала в код, в котором используется сво11ство линейной зависимоети амплитуды гармон тческого сигнала от угла поворота при малых перемещениях 2 Однако для его работы требуется датчик с трехфазным выходом. Наиболее близким к предлагаемому является преобразователь перемещения в код, содержащий датчик перемещения, выходы которого соединены с входами блока определения направления перемеюаения, другие входы которого соединены с выходами аналого-цифрового преобразователя, сумматор, двухлолупериодный выпрямитель и два двухполярных ограничителя амплитуды сигналов, входы которых соединены с соответствующими выходами датчика перемещения, а выходы подключены к соответствующим входам сумматора, выход которого соединен с пятым входом блока определения направления пкремеше-кия непосредственно, и через двухпопуаориодный выпрямитель - со входом аналого-цифрового преобрааоватепя. Дтш работы устройства необходим датчик пёремещення, имеющий двухфазный выход (синус-косинус). Синусный и косинусный выходы датчика перемещения необходимы для однозначного определения направления перемещения, при этом практически линейные участки от до +45 и от + 135 до +225 синусоидального и коси нусоидапьного напряжений используются дпя формирования напряжения треугольной формы Gj. Недостатком устройства является то, что в результате ограничения на уровне + 0,7 }у входных синусоидального и косинусоидапьного напряжений, поступающих с соответствующих выходов датчика перемещения, их суммирования и двухполупериодного выпрямления, аналого-цифровой преобразователь осутцеств гяет квантование по уровню четырех линейнык участков, что ограничивает точность работы устройства вследствие ограниченной разрядности аналого-цифрового преобразователя. Цель изобретения - повыи1ение точност работы преобразователя перемещения в код. Указанная цель достигается тем, 41X5 в преобразователь перемещения в код, содер жащий датчик перемещения, выходы которо го соединены с первыми входами блока оп ределения направления перемещения, другие входы которого соединены с выходами аналого-цифрового преобразователя, а выходы со входами реверсивного счетчика, сумматор, ограничители амплитуд и выпрямители, в него введены источник постоянного смещения, каждый выход датчика перемещения через соответствующие последовательно соединенные выпрямитель и ограничитель амплитуды подключен к первому и второ му входам сумматора, третий вход которого соединен с выходом источника постоянного смещения, а выход сумматора соединен со входом аналого-цифрового преобразователя. Двухполупериодное выпрямление синусоидального и косинусоидального напряжений поступающих с соответствующих выходов датчика перемещения, и ограничение выпрямленных напряжений по амплитуде на уровне 0,7 UHI соответствующими однополярными ограничителями амплитуды сигналов, входы которых соответс-тенно со единены с выходами двух полу не риодных выпрямителей, поазоляет получить на вхо777 дах cyMMa- ixapa два неременных напряжения трапецеидальной формы, сдвинутых по фазе на 180® . Для того, чтобы устранить постоянную составляющую суммарного сигнала, введен источник постоянного напряжения смещения . Введение этого источника, подключенного к третьему входу сумматора, позволяет пог учить на выходе сумматора сигнал треугольной формы, содержащий вссемь линейных .участков за один период входного сигнала (при этом учитьшается, что гармонический сигнал на участках от -О, 7 Urn до +0,7 Dm изменяется практически линейно). Квантование этого сигнала по уровню осуществляется аналого-цифровым преобразователем таким же образом, как и в известном. В результате на выходе преобразователя перемещения в код получается в два раза большее количес-гео импупьсов перемещения за один период входного синусоидального сигнала по сравнению с известным поскольку на выходе сумматора получается восемь линейных участков, а не четыре, как в известном, что равносильно повышению точности устройства вдвое. Объединение импульсов сложения и импупьсов вычитания, которые поступают с аналого-цифрового преобразователя следяшего типа, в одну цепь, ijaK импульсов перемещения вправо или, влево с определенным шагом по растровой шкале, осуществяяется блоком определения направления перемещения, который выдает импульсы по одному каналу при движении вправо или по другому каналу при движешш влево, причем анализ импульсов сложения и вычитания для объединения их в одну цепь осуществляется не в квадрантах, как в известном, а в октантах. На фиг. 1 представлена функшгональная схема устройства на фиг. 2 временные диаграммы сигналов, поясняк щие его работу ( Ui , Uij - сигналы на выходах датчика перемещения, U. U сигналы на выходах даухполупериодных выпрямителей, UcjUujU сигналы на входах сумматора, Ug - сигнал на выходе сумматора, Ug - сигнал на выходе цифроаналогового преобразователя, ) U - сигнал на выходах аналого-цифрового преобразователя, U сигналы на выходах блока определения направления перемещения); ка фиг. 4 - функциональная схема блока определения напра&ления перемещения. 5Преобразователь перемещения в код содержит (фиг. 1) датчик 1 перемещения выходы которого через двухпопупериодны выпрямители 2 соединены со входами соответствующик однополярных ограничителей 3 амплитуды сигналов и непосредс вейно с одними входами блока 4 определения направления перемещения. Другие входы блока 4 соединены соответственно с выходами аналого-цифрового преобразователя 5, состоящего из цифроаналоговог преобразователя 6, сравнивающего уст ройства 7 и реверсивного счетчика 8. Вы ходы-однополярных ограничителей 3 ампл туды сигналов подключены ко входам сум матора 9, третий вход которого соединен с выходом источника 10 постоянного напряжения смещения. Выход сумматора 9 подключен ко входу сравнивающего устрой ства 7 аналого-цифрового преобразователя 5. Выходы блока 4 определения направления перемещения соответственно соединены со входами реверсивного счетчика 11 на выходе которого устанавливается дифровой код перемещения. Блок 4 определения направления перемещения содержит (фиг. 4) компараторы 12 и 13 входных сигналов, настроенные на нулевой уровень входных сигналов, компаратор 14 суммы входных сигналов, компаратор 15 разности входных сигналов, инверторы 16, входы которых соответс-гаенно подключены к выходам компараторов 12 15- и дешифратор 17. Входы дешифратора 17 соответственно подкпючены к выходам компараторов 12 - 15 и инверторов 16, а также к выходам аналого-цифрового преобразователя 5 (фиг. 1). Дешифратор 17 при помощи логических операций объединяет импульсы сложения (фиг. 3) и импульсы вычитания U, в одну цепь и выдает их по каналу и или каналу U на соответствующие входы реверсивного счетчика 11 (фиг. 1), в зависимости от направления перемещения. Устройство работает следующим образом. Электрические сигналы U и . (фиг. 2), сдвинутые по фазе на 90 , с датчика 1 перемещения (фиг. 1)поступают на входы двухполупериодных выпрямителей 2, с выходом которых выпрямленные напряжения U-j, и U (фиг. 2) поступают на входы соответствующих однополярных ограничителей 3 амплитуды сигналов. Ограниченные на уровне 0,7 1) ,(где UtTi амплитуда входных синусо67 идалг:зного п кос11нусо1щапьно1х напряжений) сигналы 1(5 и Uf, (фиг. 2) с выходом ограничителей 3 поступают на входы сумматора 9, па третий вход которого с источника 10 напряжения смещения поступает мапряжепио Ui . В результате суммирования сигналов Uj: , 1 и UT на выходе сумматора 9 получается напряжение треугольной формы Ug , которое содержит восемь линейных участков за один период входного сигнала, так как участки синусоидального сигнала в пределах от -О, 7U,n ДО +0,7U|-n практически линейные. С выхода сумматора 9 (фиг. 1) электрический сигнал треугольной формы поступает на вход анапого-Щ5фрового преобразователя 5 следящего типа, состоящего из цифроаналогового преобразователя 6, сравнивающего устройства 7 и реверсивного счетчика 8, Анаяого-щ фровой преобразователь 5 ос тцествляет слежение за входным линейно-изменяющимся напряжением треугольной формы Ug формируя при этом импульсы перемещений U,o при движении вправо и U, при движении влево (фиг. 3). Импульсы перемещения и то и и 11 по каналам сложения и вычитания поступают на соответствующие входы блока 4 (фиг. 1) определения направления перемещения, н.а другие два входа которого поступают сигналы с выходом датчика 1 перемещения. Электрические сигналы U и U2 (фиг. 4) с выходом датчика 1 перемещения поступают на входы компараторов 12 15 блока 4 определения направления перемещения, причем компаратор 12 настрсьен на нулевой уровень входного сигнала и , компаратор 15 настроен на нулевой уровень входного сигнала ll/j , компаратор 13 выделяет моменты перехода через ноль суммы входных сигналов U, И )i2 , а компаратор 14 выделяет моменты перехода через ноль разности входных сигналов и и 1/2 . С выходов компараторов 12-15 электрические сигналы поступают на соответствующие входы деШ1«{)ратора 17, а также на входы штерторов 16, с выходов которых на соответ ствующие входы дешифратора 17 поступают инвертированные сигналы компараторов 12 - 15. Импульсы сложения U(o и вычитания и поступают также на соответствующие входы дешифратора 17. В результате логических операШ1й, производимых дешифратором 17, происходит объединение импульсов сложения Uio и вычитания , поступающих с выходом а шпого-Щ1фров« го преобразователя 5, в одну день. Импульсы перемещения выдаются с выходом дешифратора 17 по канаггу Ijt при движе НИИ в одном направпешти, или по каяапу У- при движении в проттшопопожном направлении, Если обозначить электрические сигналы, поступающие с выходов компараторов 12 - 15, через А, В, С и Д cooTBeTCiv. венно, сигналы с выходом соо-тветствую-. ших инверторов через Д, В, С м Дэ а им-.. и j-j со U,,Q и вычлтапин пульсы сложения ответственно через Е и F, то пггя нения 1-п 1нупьсов неремешения в одну день логические уравнения, реализуемые дешиф ратором 17, выражаюгся cnatsyrami-rNf образом:и {ллВлЕ.)м(1)лЪдР)(.(лскР)v ,.,. l()v(DлвлF)v(DлcлE)v(f. при движении в одном направлении, и и„(АлЬлР)у(1)лЬЛЕ)у(влСЛР)у(АлСАЕ)у (2 {АЛЪЛР)У(ВЛЬЛЕ)У(ЪЛС;ЛР)У(АЛЪЛЬ). при движении в обратном направлении Импульсы неремещентщ с выходом бло ка 4 определения направления перемещен по каналам U или U постула от на соответс-гоующие входы реверсивного сче чика llf на выходе которого устаяавпива ется код перемещения. Квантование но уровню с шатхэм и U пинейно™ изменяющегося напря : ения VQ (фиг, 3) аналого-аифровым преобразоватб лам 5 следшдего типа, объединение jsiпупьсов сложения U,,o и импульсов вьг1ит НИН U-1-1 в одну день в блоке 4 опрэдел ния направления неремешения, позвогшет получить на выходе устройства 8 (2 -импульсов за один период входного сину™ СО1щалы10го сигнала, что равносильно д& лению растровой шкалы, соответствующей периоду входного сигнала, на 8 (2 - 1 частей, где h - чиспо разрядоВо Таким образом, в предлагаемом нреоб разоватепе перемещения в код точность аботы, при trpo45ix условиях, повыена в 2 раза по сравнению с кзвестнььм, оскольку растровая шкала, соответствую™ ая одиоьту периоду входного сигнала, д&ится на вдвое большее чиспо частей, а менио на 8 (2 - 1) частей, где П исло разрядов аналого-цифрового преобразователя 3. На фиг, 3 дана диаграмма гугнйлов устройства для случая П 3. Полоаштельиый Э({)фект от использования предлагаемого устройства определяется его техническими характеристиками, т, о, повышенной точностью при практически одинаковых с исзвестным аппаратурных затратах. Формула изобретения Преобразователь перемещения в код, содержащий датчик перемещения, выходы которого соединены с первык и входами блока определения направления перемещеН1Ш, другие входы которого соединены с выходами аналого-цифрового преобразователя, а выходы со входами реверсивного счетчика, суь-гматор, ограничители амплитуд, выпрямители, отличаю щ и и с я тем, что, с целью повышения точности работы преобразователя, в него введен источник постоянного cмeщeния каждый выход датчика перемещения через соответствующие последовательно соединенные выпрямитель и ограничитель амплиTj-ды подключен к перво} и второму входар.-г сумматора, третий вход которого соединен с выходом источника постоянного смещения, а выход сумматора соединен со входом аналоге-ци })гх)вого преобразователя. . Источники информации, принятые во внетлание при экспертизе 1.Авторское свидетельство СССР э 46739О, кл, q 08 С 9/04, 1973. 2.Авторское свидетельство СССР № 470841, кп. q 08 С 9/ОО, 1973. 3.Авторское свидетельство СССР № 510732 кл. ( 08 С 9/ОО, 1974 (прототип)
т p Mini I M I I I V
Ци рро§ой код
Ри,г.1
Фиг.г
Перемещение
Перемещение
(риг.З
