Изобретение отиосится к области консервного производства, может использоваться в линиях произЁодства компотов и предназначено для автоматического ориентироваяи.ч яблок, рез- 5 ки их на дольки с удалением сердцевины.
„ Наиболее близкой к изобретению по технической сущности и достигаемому эффекту является машина для ориента- 10 цйи и резки плодов, содержащая узел загрузки, ориентируК)Щее устройство, г остоящее из пластинчатого цепного конвейера с: йЧейхами, механизм фиксации, прйспсйобление для резки пло- 5 лов и привод 11 .
Недостатком такой машины является периодический прмнцип действия машины, ограничивающий ее производительность, и неточная ориентация. 20
Цель ИЗОбрете;1Ия - повышение производительности и обеспечение точности ориентации плодов, поступающих На реэку.
Поставленная цель достигается тем,25 что орИеНГИруЮ14ее устройство снабжено осями, имеющими рычаги по числу ячеек конвейера и расположенными под верхней ветвью конвейера с возможностью взаимодействия с пластинами, 30
а механизм фиксации снабжен захватами, гстановлекныь я сверху и снизу каждс й ячейки с возможностью возвратно-поступательного движения и подпружиненными двустворчатьа-ш дверцами для удаления неправильно сориентированных плодов, при этом каждый верхний захват выполнен в виде стержня с грузиком, а нижний - в виде конической опоры с концентрично расположенным пальцем.
Кроме того, скг. снабжена горизонтальными и верт1;:,альными ползунами с направляющими, при этом направляющие вертикального ползуна неподвижно закреплены на горизонтальном ползуне, а направляю1цие горизонтального ползуна прикреплены к каркасу пластинчатого конвейера.
Нижние захваты закреплены на вертикальном ползуне, а верхние - на горизонтальном.
Под верхней ветвью конвейера расположен гравитационный лоток для возврата несориентированнььх плодой
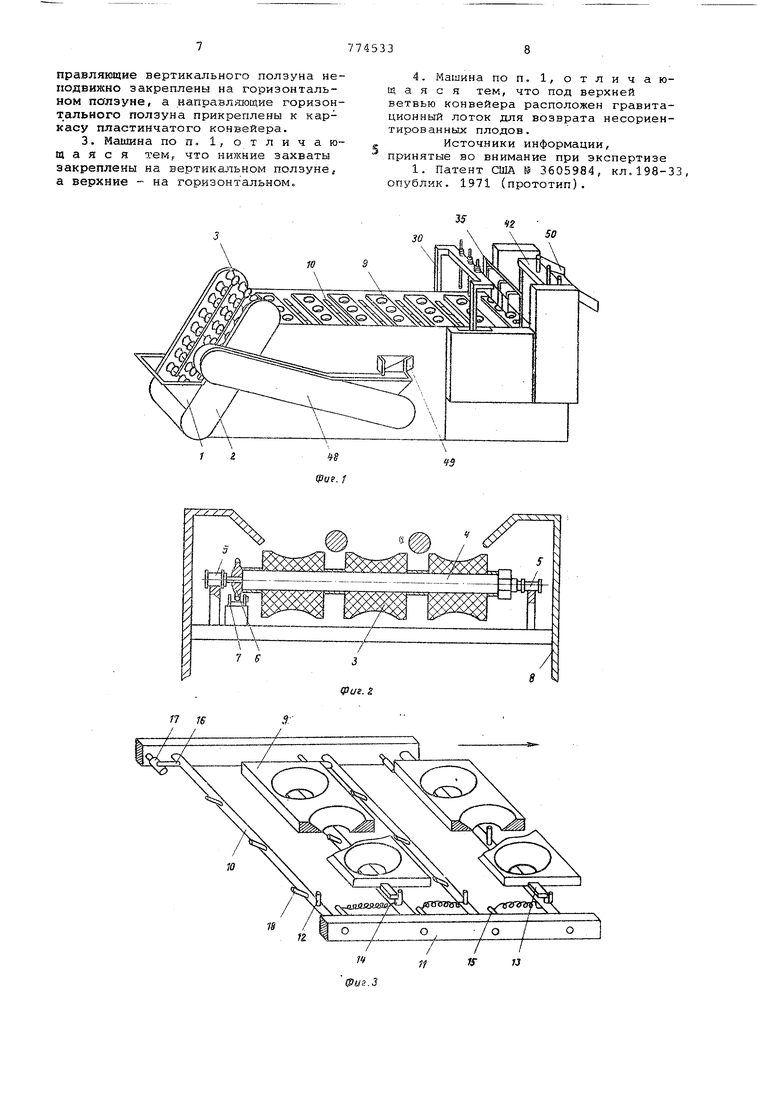
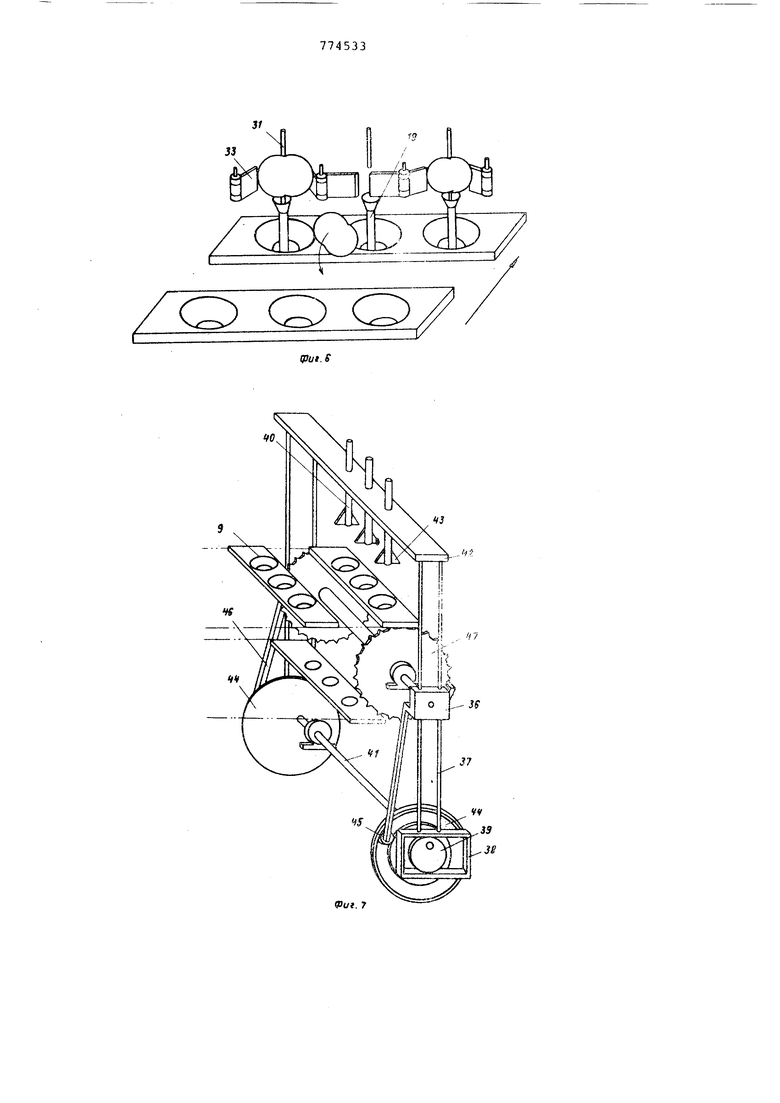
На фиг. 1 изобра,;ена предлагаемая машина для ориентации и резки плодов, общий вид; на фиг. 2 - сечение по верхней ветви транспортера подачи плодов; на фиг. 3 - участок ориентируюсдего устройства, где для показа захода рычагов в нчеЛкн сделан мест ный обрыв-пластин; на фиг. 4 - меха низм фиксации ллодов (пластинчатый конвейер условно не показан кроме одной пластины верхней его ветви); на фиг. 5 - захваты с плодами перед проходом через контрольные дверцы; на фиг. б - захваты с плодами в момент прохождения через дверцы; на фиг. 7 - приспособление для резки плодов и приводная часть пластинчатого конвейера; на Лиг. 8 - схема, поясняющая работу машины. Машина для ориентации и резки плодов содержит узел загрузки вклю чакячий загрузочный бункер 1, роликовый цепной транспортер 2 подачи плодоа с вращсиощимися профильными роликами 3, последние насажены на стержни 4 (см.фиг. 2), которые свои ми концами соединяются с парой цепе 5 транспортера, на стержень 4 насаж на также звездочка 6, находящаяся в зацеплении с цепью 7, которая непод вижно закреплена к каркасу 8 транспортера. Ориентирующее устройство, состоя щее из пластинчатого цепного конвей ера (см. фиг. 1, 7) непрерывного действия, на двух параллельных цепях которого крепятся пластины 9 с шагом равным или большим ширины пластины, имекдаий ячейки для плодов в форме усеченных конусов,а под верхней ветв конвейера расположены оси 10,сидящие сроими концами в отверстиях опорных планок 11, неподвижно прикрепленных к каркасу конвейера и имеющих качательное движение, осуществляемое посредством поворотного рычага 12, на который воздействует уступ 13 пластины 9, а также пружины 14, один конец которой крепится к основанию рычага 12, а другой - к штырю 15 опорной планки 11, а фиксация оси 10 в исходном положении происходит при помощи рычага 16, касающегося уступа 17, закрепленного на опорной планке 11; оси 10 снабжены рычагами 18, число которых на оси равно числу яче в пласт1не 9, а длина их на всех бея равная - на первой наибольшая, а на каждой последующей .yJv ёньшaeтcя. Механизм фиксации, расположенный за осями содержит устройство для захвата плодов, состоящее (см.фиг. 1,4 из имеющих коническую форму с концентрично выступающим пальцем захватов 19, расположенных под пластинами 9 и закрепленных неподвижно на траверсе 20 ползунов 21, в прямоугольных рамах которых вращаются и скользят кулаки 22 постоянной ширины; кулак 22 служит для вертикального пере мещения ползуна 21 по направлякядим 23, неподвижно закрепленным на ползу не 24, который перемещается по горизонтальным направляющим 25, неподвижно прикрепленньлм к каркасу конвейера посредством кулака 26 и пружины 27, концы которой крепятся к ползуну 24 и к каркасу 28 пластинчатого конвейера; кулаки 26 насажены на вал 29 и имеют участок эвольвентного профиля, благодаря которому обеспечивается синхронизация рабочего хода ползуна 24 с движением пластинчатого конвейера; в отверстиях траверсы 30 ползуна 24 ходят верхние захваты 31, выполненные в виде стержней, несущих грузики 32. Механизм фиксации содержит также подпружиненные двустворчатые дверцы (см.фиг.1, 5, 6), предназначенные для отбрасывания неправильно сориентированных плодов и расположенные над верхней ветвью пластинчатого конвейера. Дверцы состоят из полотен 33, насаженных и подпружиненных (пружина условно не показана) на нижних концах осей 34, висящих на консоли 35, прикрепленной к каркасу пластинчатого конвейера. Устройство для резки плодов на половинки и удаления сердцевины смонтировано у привода пластинчатого конвейера и состоит (см. фиг. 1, 7) из корог-ысла 36, свободно насаженного на концы вала приводного пластинчатого конвейера, в направляквцих которых ходят ползуны 37, нижний конец ползунов 37 заканчивается прямоугольной рамой 38, в которой вращается и скользит кулак 39 для вертикального г еремещения ножей 40, насаженный на вал 41, расположенный под пластинчатым конвейером, а верхние концы ползунов 37 связываются поперечной траверсой 42, на которой над центрами ячеек пластин 9 закреплены ножи 40, состоящие из центрального трубчатого ножа для вырезания сердцевины и радиально к нему прикрепленных перьев 43 для резки плодов на дольки; на вал 41 насажены также кулаки 44, которые через ролик 45, сидящий на конце рычага 46 и жестко связанный с KopONuicnoM 36, сообщают последнему угловую скорость, равную угловой скорости звездочки 47 пластинчатого конвейера. В состав машины также входят транспортер 48 возврата (см.фиг. 1), смонтированный на боковине машины и соединяемый с гравитационным лотком 49, расположенным под верхней ветвью ориентирующего конвейера, и лоток 50 для выноса сердцевины плодов. Машина работает следующим образом. Плоды засыпаются в бункер 1 транспортера 2 (см.фиг. 1, 2). При движении цепей 5 транспортера 2 в результате перекатывания звездочки 6 по цепи 7 ролики приводятся во вращение, при этом плоды запсщают в пространство между соседними роликами 3, выносятся из навала и укладываются в ячейки пластин 9 конвейера. В процессе перемещения пластин 9 последние воздействуют своим уступом 13 (см. фиг. 3) на поворотный рычаг 12 и поворачивают ось 10, при этом ориентирующий рычаг 18 входит в ячейку, касаясь поверхности уложенного в нее плода. В результате многократного воздействия на плод рычагов 12 происходит суммирование микроповоротов плода и плод ориентируется. В этом случае рычаг входит Б углубление у плодоножки или цветоложа и не касается поверхности плода.
При вращении вала 29 кулак 22 перемещает ползун 21 вверх (см.фиг.4), кулак 26 перемещает ползун 24 в направлении движения ориентирующего коннейера, ;-- результате чего траверса 2 С с нижними захватами 19 получает сложное ЛЕижение. Так как горизонта. составляющая этого движения синхронизирована с перемещением с;сиентирующего конвейера, захваты 19 входят в ячейки движущихся пластин 9 извлекают находящиеся в нях пледы (см. фиг. 5, б), которые на своем пути встречаются с вертикальными захватами 31 и приподнимают их. преодолевая вес грузиков 32, далее захваты с плодами продолжают свое движение уже по горизонтальной траектории и проходят через подпружиненные двустворчатые дверцы, при этом ориентированный плод, надежно удерживаемый концами захватов 19 и 31, вошедшими в углубления у плодоножки и цветоложа, преодолевая, сопротивление подпружиненных двустворчатых дверцев проходит через них, а неориентированный - не удерживается захватами и провалившись через зазор между пластинами 9 (см.фиг. 6), скатывается по гравитационному лотку 49 на ленту транспортера 48 и возвращается в бункер 1, при дальнейшем движении захват 19 опускается и сориентированный плод, устойчиво сидящий ка его опорной площадке, возвращается в ячейку.
Далее плоды поступают на позицию резки. При вращении вала 41 кулак 39 опускает траверсу 42 и режущие ножи 40, одновременно под действием кулака 44 происходит поворот коромысла 36 и связанных с ним через траверсу 42 и ползун 37 режущих ножей; при движении вниз ножи входят в плоды не на полную их высоту и при обратном ходе извлекаются из ячейки, при следующем рабочем ходе ножей сидящие на них плоды встречаются с уложенными в ячейках и разрезаются: дольки разрезанных плодов выносятся пластинами конвейера, а сердцевина плодов удаляется посредством лотка 50.
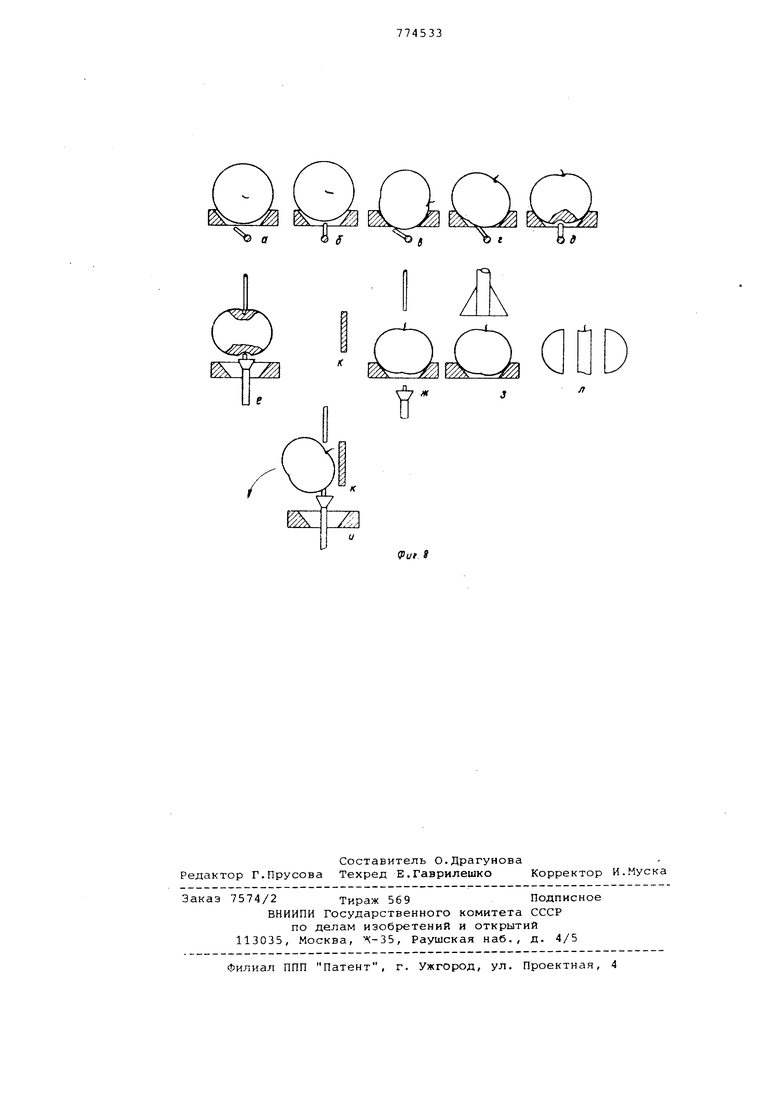
Принципиальная схема работы машины поясняется фиг. 8. В позиции а показан несориентированный плод в ячейке в положении, самом неблагоприятном для ориент-- ции, ориентируюшип рычаг находится в исходном положении. При движении ячейки слева направо ориентирующий рычаг тгаворачивается, входит в ячейку и приподнимает плод, как показано в позиции 6. Плод не может удержаться на конце рычага, положение его неустойчиво и он падает, поворачиваясь в произвольном направлении. Ввиду несимметричности плода вероятным (часто встрчающимся) направлением поворота является направление, перпендикулярное к плоскости перемещения ячейки, поэтому в результате многократных воздействий ориентирующего рычага плод оказывается переведенным в положение, благоприятное для ориентации (позиция в). На этом первый этап ориентации заканчивается, далее плод лег- ко переводится в ориентированное положение (позиции г и д).
Ориентированный плод извлекается из ячейки и надежно зажимается захватами (позиция е ) и, пройдя через подпружиненные двустворчатые дверцы к возвращается в ячейку (позиция ж),- несориентированный же плод не удерживается захватами и сбрасываетс я (по3 ици я и) .
Возвращенный в ячейку ориентироканный плод подвергается резке (позиция з) на дольки и сердцевину (позиция л).
Экономический эффект от внедрения в производство одной машины д.г.я ориентации и резки плодов.составляет 7445 руб. в год.
Формула изобретения
1 . MaiUHHa для ориентации и резки плодов, содержащая узел загрузки, ориентирующее устройство, состоящее из пластинчатого цепного конвейера с ячейками, механизм фиксации, приспособление для резки плодов и привод, отличающаяся тем, что, с целью повышения производительности и обеспечения точности ориентации плодов, поступивших на резку, ориентирующее устройство снабжено осями, имеющими рычаги по числу ячеек конвейера и расположенными под верхней ветвью конвейера с возможностью взаимодействия с пластинами, а механизм фиксации снабжен захватами, установленными сверху и снизу каждой ячейки с возможностью возвратно-поступательного движения и подпружиненными двустворчатыми дверцами для удаления неправильно сориентированных плодов, при этом каждый верхний захват выполнен в виде стержня с грузиком, а нижний - в виде конической опоры с концентрично расположенным пальцем.
2. Машина поп. l,oтличaющ а я с я тем, что она снабжена горизонтальными и вертикальными ползунами с направляющими, при этом направлякяцие вертикального ползуна неподвижно закреплены на горизонтальном поглэуне, а направляющие горизонтального ползуна прикреплены к каркасу пластинчатого конвейера.
3. Машина по п. 1, отличающаяся тем, что нижние захваты закреплены на вертикальном ползуне, а верхние на горизонтальном.
4. Машина по п. 1, отличающаяся тем, что под верхней ветвью конвейера расположен гравитационный лоток для возврата несориентированных плодов.
Источники информации, принятые во внимание при экспертизе
1. Патент США 3605984, кл.198-33 опублик. 1971 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для ориентации и резки плодов | 1986 |
|
SU1405787A2 |
| Устройство для резки яблок на дольки и вырезки сердцевины | 1984 |
|
SU1261616A1 |
| Установка для резки плодов на дольки и вырезки сердцевины | 1989 |
|
SU1722403A1 |
| МАШИНА ДЛЯ РЕЗКИ ПЛОДОВ НА ДОЛЬКИ И ВЫРЕЗКИ СЕРДЦЕВИНЫ | 1990 |
|
RU2020836C1 |
| АВТОМАТ ДЛЯ УДАЛЕНИЯ СЕРДЦЕВИНЫ И РЕЗКИ ЯБЛОК | 1990 |
|
RU2007102C1 |
| Устройство для поштучной подачи плодов | 1988 |
|
SU1644884A1 |
| Машина для резки яблок на долькии ВыРЕзКи СЕРцЕВиНы | 1978 |
|
SU799712A1 |
| ТЕХНОЛОГИЧЕСКАЯ ЛИНИЯ ПРОИЗВОДСТВА ФРУКТОВЫХ ЧИПСОВ | 2010 |
|
RU2449544C1 |
| Установка для вырезки сердцевины из плодов | 1982 |
|
SU1090325A1 |
| Машина для вырезки сердцевины из плодов | 1985 |
|
SU1331478A1 |

К
I
1f
13
фи.З
30
30
(Pus. 5
33
Фиг. 7
43
-f
3S
