77
«.
6ff
сд
00
ю
«;
Ui.f
Изобретение относится к консервно- му производству, может использоваться в линиях производства компотов и предназначено для автоматического ориентирования яблок, резки на дольки с удалением сердцевины.
Цель изобретения - возможность переработки плодов, неоднородных по
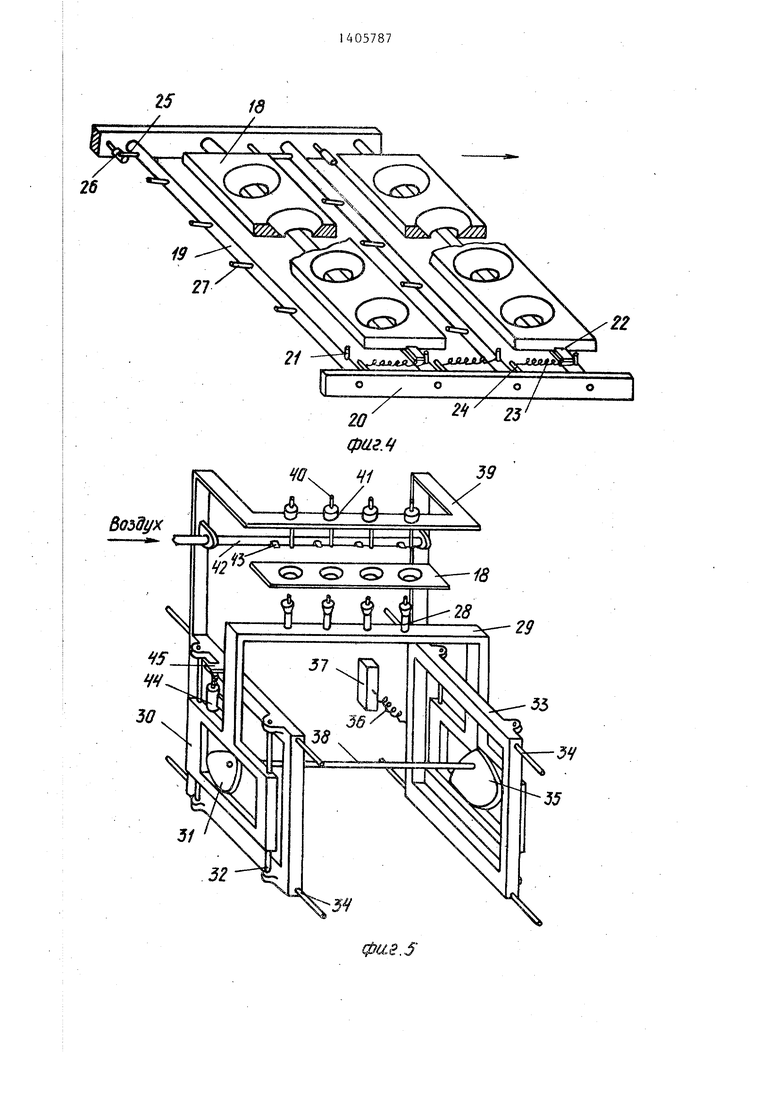
конвейера (фиг. 4 и 4) непрерывного действия, на двух параллельных цепях которого крепятся пластины 18 с шагом, равным или большим ширины пластины, имеющие ячейки для плодов в форме усеченных конусов. Под верхней ветвью конвейера расположены оси 19, сидящие своими концами в отверстиях
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для ориентации и резки плодов | 1978 |
|
SU774533A1 |
| Установка для резки плодов на дольки и вырезки сердцевины | 1989 |
|
SU1722403A1 |
| МАШИНА ДЛЯ РЕЗКИ ПЛОДОВ НА ДОЛЬКИ И ВЫРЕЗКИ СЕРДЦЕВИНЫ | 1990 |
|
RU2020836C1 |
| Машина для резки яблок на долькии ВыРЕзКи СЕРцЕВиНы | 1978 |
|
SU799712A1 |
| Устройство для резки яблок на дольки и вырезки сердцевины | 1984 |
|
SU1261616A1 |
| Устройство для поштучной подачи плодов | 1988 |
|
SU1644884A1 |
| Автомат для завертки конфет"вперекрутку | 1974 |
|
SU516580A1 |
| СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ СТРОИТЕЛЬНЫХ ЩИТОВ ИЗ КАМЫША ИЛИ СОЛОМЫ | 1930 |
|
SU21436A1 |
| Многопозиционная машина для вставки книжных блоков в переплетные крышки | 1956 |
|
SU119170A1 |
| Машина для вырезки сердцевины из плодов | 1985 |
|
SU1331478A1 |
Изобретение может быть использовано в линиях по производству компотов из яблок.; Цель изобретения состоит в достижении возможности переработки яблок, неоднородных по форме, увеличении производительности и, уменьшении повреждаемости плодов Эта цель достигается тем, что по основному авт.св. ( 774533 ориентирующее устройство снабжается двумя дополнительными конвейерами 48 для ручной доориентировки плодов, а в устройстве 39 сбрасывания неправильно сориентированных плодов установлена группа воздушных сопл 43 над ячейками пластин ориентирующего устройства с возможностью возвратно-поступательного движения,перегрузка плодов с питателя 2 в ячейки пластин 9 ориентирующего устройства осуществляется посредством заслонки фигурной формы, имеющей возвратно-поворотное движение. Ножевыми устройствами осуществляется непрерывная резка плодов на дольки с ; удалением сердцевины. 1 з.п. ф-лы, 9 ил. i С
форме, увеличение производительности.-, ,|Q опорных планок 20, неподвижно прикрепленных к каркасу койвейера и им ющих качательное движение, осуществ ляемое посредством поворотного рыча 21, на который воздействует уступ
уменьшение повреждения плодов
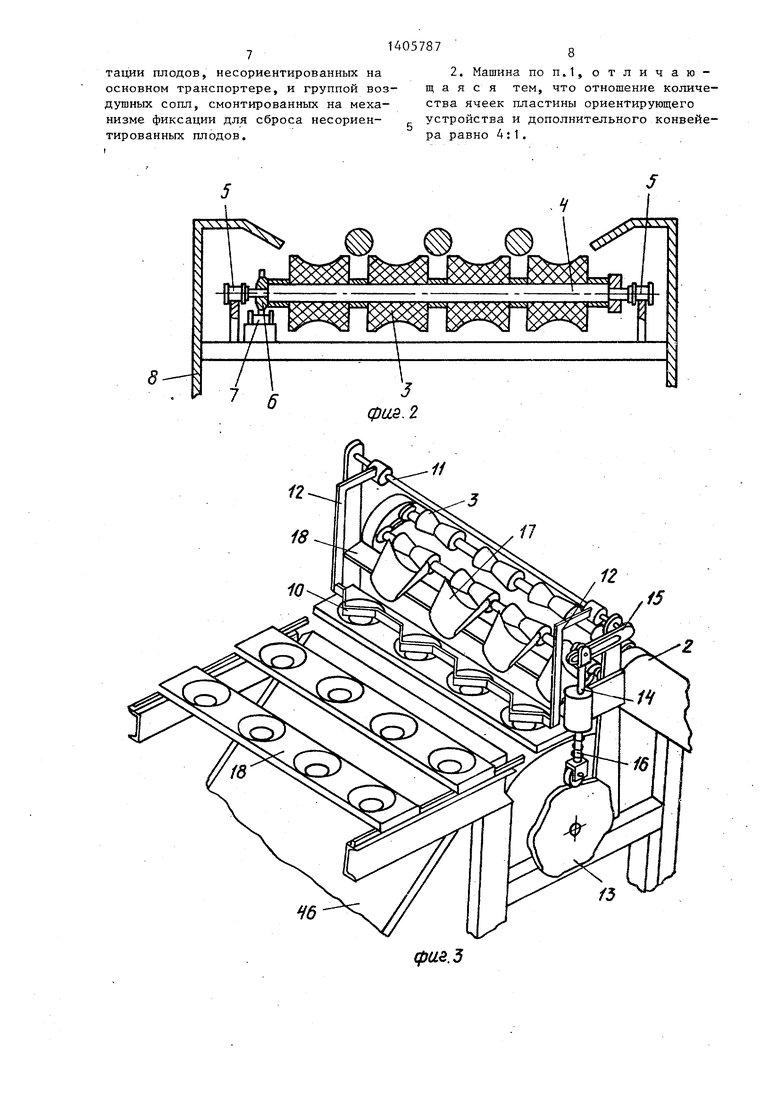
На фиг. 1 изображена машина для ориентации и резки плодов, общий вид; на фиг. 2 - сечение по верхней ветви
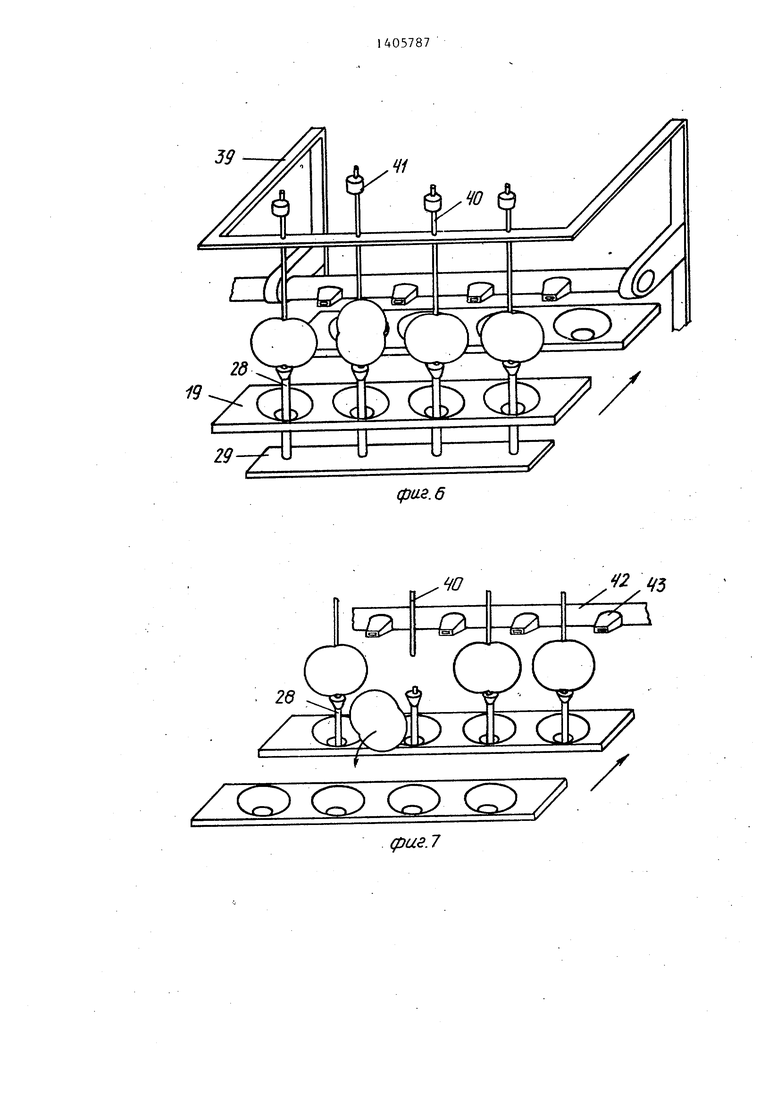
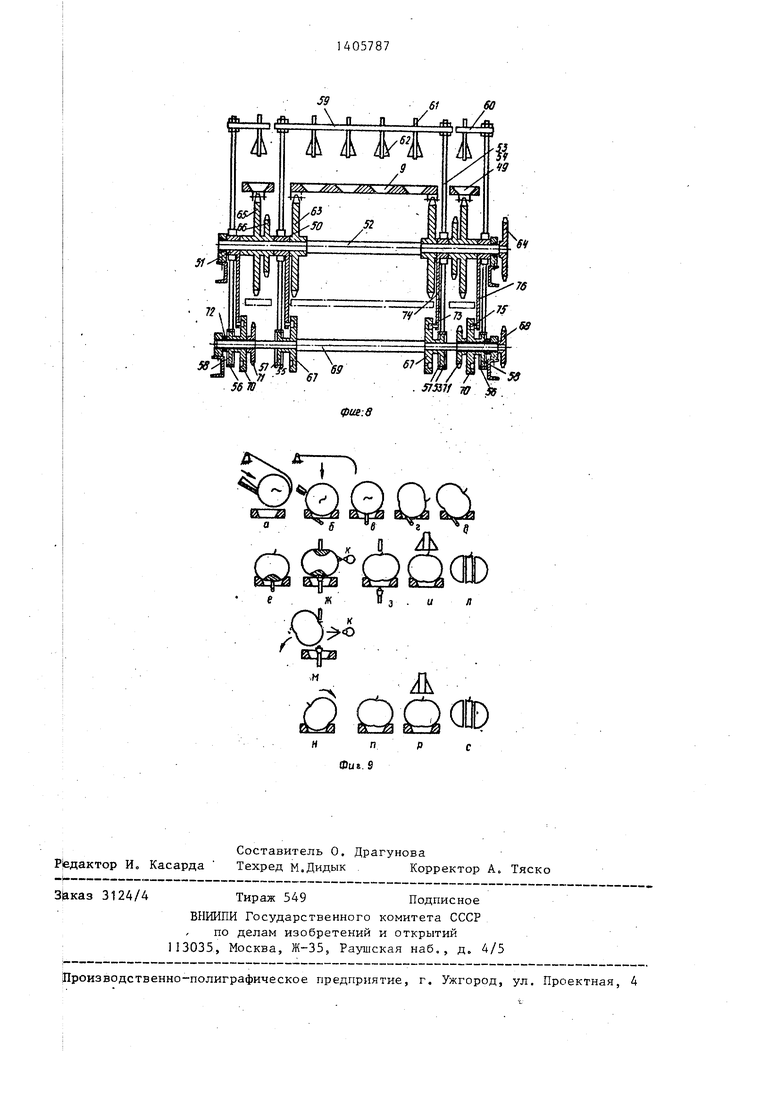
транспортера подачи плодов; на фиг.З-} пластины. Один конец пружины 23 креустройство для перегрузки плодов с транспортера подачи в ячейки пластинчатого конвейера; на фиг. 4 - участок ориентирующего устройства, где для . показа. захода рычагов в ячейки сделан местный обрыв пластин; на фиг. 5 - механизм фиксации плодов с узлом контроля ориентации (пластинчатый конвейер не показан, кроме одной пластины верхней ветви); на фиг.6 - захваты с плодами перед контролем правильности ориентировки, подачей сжатого воздуха; на фиг. 7 - захваты с плодами в момент подачи сжатого воздуха; на фиг. 8 - приспособления для резки плодов и приводная часть пластинчатых конвейеров; на фиг. 9 - схема, поясняющая работу машины.
Машина для ориентации и резки плодов содержит узел загрузки, включаю- загрузочный бункер 1, роликовый цепной транспортер 2 подачи плодов с вращающимися профильными роликами 3. Последние насажены на стержни 4 (фиг. 2), которые своими концами соединяются с парой цепей 5 транспортера. На стержень 4 насажена также звездочка 6, находящаяся в зацеплении с цепью 7, которая неподвижно закреплена к каркасу 8 транспортера.
Устройство для перегрузки плодов с транспортера 2 подачи в ячейки ориентирующего устройства 9 состоит из заслонки 10 фигурной формы, неподвижно закрепленной на оси 11 посредством коромысел 12, получающей возвратно-поворотное движение посредством кулака 13, сидящего на консоли ведомого вала ориентирующего устройства, ползуна с роликом 14, пазового рычага 15 и пружины 16 для силового замыкания механизма.
Ориентирующее устройство состоит из лотка 17 пластинчатого цепного
20
25
30
35
40
45
50
55
пится к основанию рычага 21, а другой - к штырю 24 опорной планки 20.
Фиксация оси 19 в исходном положении происходит при помощи рычага 25, касающегося уступа 26, закрепленного на опорной планке 20. Оси 19 снабжены рычагами 27, число которых на оси равно числу ячеек пластины, а длина их на всех осях .равняя - на первой наибольшая, а на каждой последующей уменьшается.
Механизм фиксации, расположенньм за осями, содерлсит устройство для захвата плодов, состоящее (фиг. 1 и 5) из имеющих коническую форму с кон- центрично выступающим пальцем захватов 28, расположенных под пластинами и закрепленных неподвижно на траверсе 29 ползунов 30, в прямоугольных рамках которых вращаются и скользят кулаки 31 постоянной ширины.
Кулак 31 служит для вертикального перемещения ползуна 30 по направляющим 32, неподвижно закрепленным на ползуне 33, которьй перемещается по горизонтальным направляющим 34, неподвижно прикрепленным к каркасу конвейера посредством кулака 35 и пружины 36, концы которой крепятся к ползу ну 33 и к каркасу 37 ориентирующего конвейера. Кулаки 35 насажены на вал 38 и имеют участок эвольвентного профиля, благодаря которому обеспечивается синхронизация рабочего хода ползуна 33 с движением ориентирующего конвейера. В отверстиях траверсы 39 ползуна 33 ходят верхние захваты 40, выполненные в виде стержней, несущих грузики 41.
Механизм фиксации содержит также узел контроля для сбрасывания неправильно сориентированных плодов, который состоит из воздушной трубки 42, закрепленной на траверсе 39, снабженопорных планок 20, неподвижно прикрепленных к каркасу койвейера и имеющих качательное движение, осуществляемое посредством поворотного рычага 21, на который воздействует уступ 22
пластины. Один конец пружины 23 кре0
5
0
5
0
5
0
5
пится к основанию рычага 21, а другой - к штырю 24 опорной планки 20.
Фиксация оси 19 в исходном положении происходит при помощи рычага 25, касающегося уступа 26, закрепленного на опорной планке 20. Оси 19 снабжены рычагами 27, число которых на оси равно числу ячеек пластины, а длина их на всех осях .равняя - на первой наибольшая, а на каждой последующей уменьшается.
Механизм фиксации, расположенньм за осями, содерлсит устройство для захвата плодов, состоящее (фиг. 1 и 5) из имеющих коническую форму с кон- центрично выступающим пальцем захватов 28, расположенных под пластинами и закрепленных неподвижно на траверсе 29 ползунов 30, в прямоугольных рамках которых вращаются и скользят кулаки 31 постоянной ширины.
Кулак 31 служит для вертикального перемещения ползуна 30 по направляющим 32, неподвижно закрепленным на ползуне 33, которьй перемещается по горизонтальным направляющим 34, неподвижно прикрепленным к каркасу конвейера посредством кулака 35 и пружины 36, концы которой крепятся к ползуну 33 и к каркасу 37 ориентирующего конвейера. Кулаки 35 насажены на вал 38 и имеют участок эвольвентного профиля, благодаря которому обеспечивается синхронизация рабочего хода ползуна 33 с движением ориентирующего конвейера. В отверстиях траверсы 39 ползуна 33 ходят верхние захваты 40, выполненные в виде стержней, несущих грузики 41.
Механизм фиксации содержит также узел контроля для сбрасывания неправильно сориентированных плодов, который состоит из воздушной трубки 42, закрепленной на траверсе 39, снабженной соплами A3 в количестве, соответствующем числу ячеек пластины,соединенной с магистралью сжатого воздуха посредством клапана 44, установленного на ползуне 30 и включаемого посредством копира 45, закрепленного на ползуне 33.
Устройство ручной доориентировки плодов состоит из смонтированного под верхней ветвью ориентирующего устройства, гравитационного лотка
46,подающих роликовых транспортеров
47,пластинчатых конвейеров 48 (фиг. 1). Устройства для резки плодов на дольки и удаления сердцевины смонтированы у приводов конвейеров с пластинами 49 и состоят (фиг. 8) из коромысел 50 и 51, свободно насаженных на приводной вал 52,в направляющих которых ходят ползуны 53 и 54 Нижний конец последних заканчивается прямоугольными рамами 55 и 56, в которых вращаются и скользят кулаки
57 и 58, предназначенные для вертикального перемещения поперечной траверсы 59 и кронштейнов 60. На последних над центрами ячеек пластин 18 и 19 закреплены ножи 61, состоящие из центрального трубчатого ножа для вырезания сердцевины и радиапьно к нему прикрепленных перьев 62 для резки плодов на дольки.
40
Звездочки 63 ориентирующего конвейера и производная звездочка 64 неподвижно закреплены на валу 52, а звезДочки 65 с закрепленными на них приводными звездочками 66 сидят на валу 52 свободно. Кулаки 57 совместно с кулаками 67 и приводная звездочка 68 закреплены на валу 69 неподвижно, а кулаки 58 и 70 и звездочки 71 неподвижно насажены на втулки 72, свободно сидящие на валу 69. Кулаки 67 через ролик 73, сидящий на конце рычага 74, жестко связанного с коромыслом 50, сообщают последнему угловую скорость, равную угловой скорости -« звездочки 63 ориентирующего конвейера, а кулаки 70 через ролик 75, сидящий на конце рычага 76, связанного с коромыслом 51, сообщают последнему.
В процессе перемещения пластин последние воздействуют своим уступом 22 (фиг, 4) на поворотный рычаг 21 и поворачивают ось 19, При этом ориен- тируюшр й рычаг 27 входит в ячейку, касаясь поверхности уложенного в нее плода. В результате многократного воздействия на плод рычагов 27 происходит сз ммирование микропроворотов плода и он ориентируется. В этом случае рычаг, входит в углубление у плодоножки или цветоложа и не касаются поверхности плода.
35
45
При вращении вала 38 кулак 31 перемещает ползун 30 вверх (фиг. 5). Кулак 35 перемещает ползун 33 в направлении движения ориентирующего конвейера, в результате чего траверса 29 с нижними захватами 28 получает сложное движение. Так как горизонтальная составляющая этого движения синхронизирована с перемещением ориугловую скорость, равную угловой ско- ее ентирующего конвейера, захваты 28 рости звездочки 65 дополнительного входят в ячейки пластин, извлекают конвейера. В состав мапшны также вхо- находящиеся в них плоды (фиг. 6 и 7), дят лотки 7.7 и 78 для выноса сердце- которые на своем пути встречаются с вины и нарезанных долек. Приводы ори- вертикальными захватами 40 и припод0
5
0
0
«
ентирующего и дополнительных конвейеров не показаны.
Машина работает следуюшрм образом.
Плоды засыпаются в бункер 1 транспортера 2 (фиг. 1 и 2). При движении цепей 5 транспортера 2 в результате перекатывания звездочки 6 по цепи 7 ролики приводятся во вращение. -При этом плод западает в пространство между соседними роликами 3, выносится из навала на лоток 17, так как в этот момент ролик ползуна 14 поджат к части кулака 13, концентричной оси вращения, ось 11 повернута в одно из крайних положений, профильная заслонка 10 находится в крайнем нижне положении, плод удерживается последней от вьшадания.
В момент подхода очередной пластины под действием кулака 13 ползуна поднимается и плод, ничем не удерживаемый, вываливается из лотка в ячейку. После определенной выстойки за- 5 слонки 10, обеспечиваемой второй
частью профиля кулака 13, концентричной оси вращения, необходимой для беспрепятственного прохода пластины с плодами, заслонка 10 возвращается в исходное, крайнее нижнее, положение для приема очередных плодов.
В процессе перемещения пластин последние воздействуют своим уступом 22 (фиг, 4) на поворотный рычаг 21 и поворачивают ось 19, При этом ориен- тируюшр й рычаг 27 входит в ячейку, касаясь поверхности уложенного в нее плода. В результате многократного воздействия на плод рычагов 27 происходит сз ммирование микропроворотов плода и он ориентируется. В этом случае рычаг, входит в углубление у плодоножки или цветоложа и не касаются поверхности плода.
0
5
При вращении вала 38 кулак 31 перемещает ползун 30 вверх (фиг. 5). Кулак 35 перемещает ползун 33 в направлении движения ориентирующего конвейера, в результате чего траверса 29 с нижними захватами 28 получает сложное движение. Так как горизонтальная составляющая этого движения синхронизирована с перемещением оринимают их до уровня воздушных сопл 43, преодолевая вес грузиков.
При вращении вверх ползуна 30, клапан 44 под действием копира 45 включается, и трубка 42 соединяется с магистралью сжатого воздуха. Под действием воздущных струй сопл 43 неориентированный плод не удерживается захватами 28 и 40 и выпадает, а ориентированный плод надежно удерживается концами захватов 28 и 40, вошед- щих в углубление у цветоложа.
плодоножки и
После этого захват 28 опускается, и ориентированный плод, устойчиво сидящий на его опорной площадке, возвращается в ячейку, а опрокинутые плоды, провалившись через зазор межд пластинами (фиг. 7), скатываются по гравитационному лотку 46 и выносятся влево и вправо на транспортеры 47 (фиг, 1), которые направляют их в ячейки пластин конвейера 48, где плод ориентируется вручную. Далее плоды поступают на позицию резки.
При вращении вала 69-от звездочки 68 (фиг. 8), кулаки 57 спускают траверсу 59 с режущими ножами 61. Одновременно под действием кулака 67 происходит поворот коромысла 50 и связанных с ним через траверсу 59 и ползун 53 режущих ножей. При вращении втулки 72 от звездочки 71 кулаки 58 опускают кронштейн 60 с режущим ножом 61. Одновременно под действием кулака 70 происходит поворот коромысла 51 и связанных с ним через кронштейн 60 и ползун 54 режущих ножей. При движении вниз ножи входят в плоды не на полную их высоту и при обратном ходе извлекаются из ячеек, При следующем рабочем ходе ножей сидящие на них плоды в ячейках разрезаются. Дольки разрезанных плодов выносятся пластинами конвейера и лотком 78, а сердцевина плодов выпадает на лоток 77. Ориентирующий конвейер приводится в движение от основного привода посредством звездочки 64, а дополнительные конвейеры - от автономных приводов посредством звездочек 66.
В позиции а (фиг. 9) показан плод поддерживаемый заслонкой, в момент подхода ячейки, а в позиции S по- павпшй в ячейку плод в положении, самом неблагоприятном для ориентирования, ориентирующий рычаг находится в исходном положении. При движении ячейки слева направо ориентирующий рычаг поворачивается, входит в ячейку и приподнимает плод, как показано в позиции, в . Плод не может удержаться на конце рычага, положение его неустойчиво и он падает, поворачиваясь в произвольном направлении. Ввиду несимметричности плода вероятным (часто встречающимся) направлением поворота является направление, перпендикулярное к плоскости перемещения ячейки. Поэтому в результате многократных воздействий ориентирующего рычага плод оказывается- переведенньгм в положение, благоприятное для ориентации (позиция Т- ). На этом первый этап ориентации заканчивается.Далее плод легко -переводится в ориентированное положение (позиция i3, е).
5
0
Ориентированный плод, извлеченный из ячейки и надежно зажатый захватами (позиция ж), удерживается в данном положении, под действием на него потока сжатого воздуха, возвращается в ячейку (позиция } ) и подвергается резке на дольки с удалением сердцевины (позиции и , л). Несориентированный плод не удерживается захватами, опрокидывается (позиция м), выносится на дополнительный конвейер, где происходит его ручаная ориентировка
(позиции 1 , п ), и подвергается резке на дольки с удалением сердцевины (позиции Р , с ) .
Предлагаемое изобретение позволяет перерабатывать плоды неоднородные по
форме, увеличить производительность и уменьшить повреждения плодов.
Формула изобретения
тации плодов, несориентированных на основном транспортере, и группой воздушных сопл, смонтированных на механизме фиксации для сброса несориентированных плодов.
Н6
фаг.З
5/
52
2Z
39
26
/ С О О С
фаг. 6
фаз.7
6160
п rfti п п п д rfli nXfl,
I
4 I JPl
11 x
| Машина для ориентации и резки плодов | 1978 |
|
SU774533A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
