Изобретение относится к устройствам для переработки яблок и может быть использовано на плодоперерабатывающих предприятиях.
Цель изобретения - повышение производительности и надежности работы.
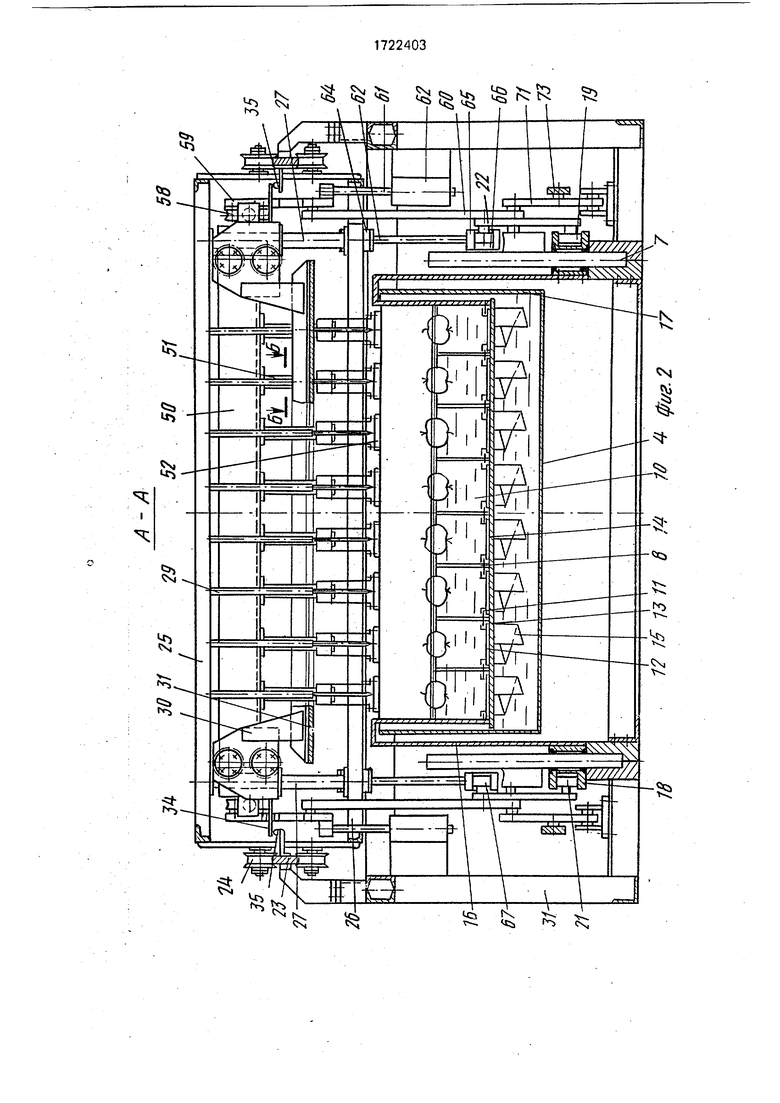
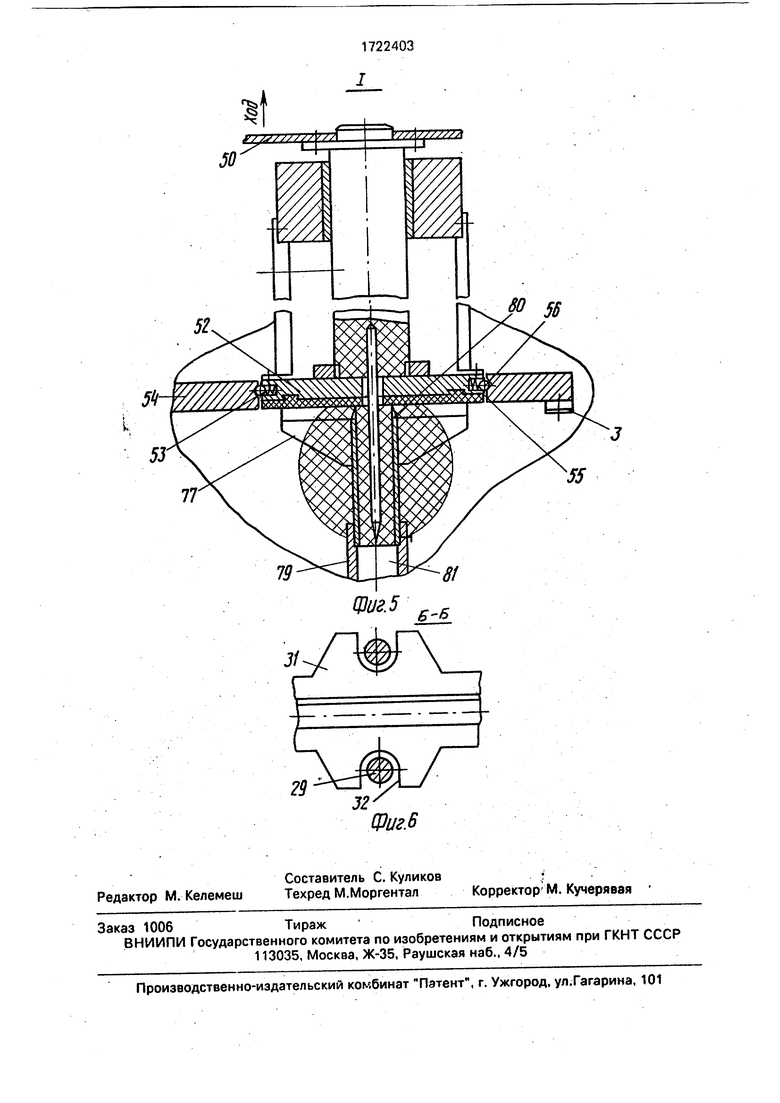
На фиг.1 изображена установка для резки плодов на дольки и вырезки сердцевины; на фиг.2 - разрез А-А на фиг.1: на фиг.З кинематическая схема приводов установки; на фиг.4 - циклопрограмма работы рычажных приводов горизонтального и вертикального перемещений; на фиг.5 - узел I на фиг.1; на фиг.6 - разрез Б-Б на фиг.2.
Установка для резки плодов на дольки и вырезки сердцевины состоит из загрузочного бункера 1 с вертикально перемещающимся шибером 2, корпуса 3, в котором
установлены ванна 4 для распределения плодов и ванна 5 для ориентации плодов, имеющие общую стенку 6. Внутри ванны 4 установлен с возможностью вертикального перемещения по направляющим стойкам 7, жестко закрепленным на корпусе 3, захватный механизм предварительного поштучного разделения плодов. Стойки 7 установлены на участке расположения его средней части, захватный механизм 8 состоит из горизонтальной решетки 9 с ячейками 10. В каждой из ячеек 10 горизонтальной решетки 9 установлен с возможностью поворота вокруг оси 11 флажок 12 и ограничительный упор флажка 13. Флажки 12 предназначены для последовательного пропускания яблок в ячейки 10 и удержания их в последних.
К основанию горизонтальной решетки 9 прикреплена плита 14 со сквозными отверстиями, под которыми жестко закреплены патрубки 15, нижний конец каждого из которых выполнен в виде винтовой линии с шагом, обеспечивающим вероятность попадания в каждый патрубок 15 яблок. Боковые стенки 16 захватного механизма 8 (горизонтальной решетки 9) выполнены П-образны- ми и выступающими за высоту ванны 4 для размещения между парой параллельных плоскостей стенки 17 ванны 4. Снаружи за стенками ванны 4 к П-образным боковым стенкам 16 жестко прикреплены втулки 18с пазами 19с возможностью перемещения по направляющим стойкам 7 для осуществления вертикального перемещения вверх и вниз горизонтальной решетки 9 захватного механизма 8.
На этих же П-образных боковых стенках 16 жестко закреплены одним концом полосы 20, другие концы которых жестко прикреплены к шиберу 2 и предназначены для синхронизации вертикального перемещения шибера 2 и захватного механизма 8. На концах боковых П-образных стенок 16 в пазах втулок 1.8 установлены ролики 21, закрепленные на длинных плечах неравноплечих двуплечих рычагов 22, шарнирно расположенных на корпусе 3 и являющихся приводом вертикального перемещения захватного механизма 8.
На корпусе 3 жестко закреплены две направляющие 23 с роликами 24, на которых установлены верхняя 25 и нижняя 26 рамы, жестко соединенные между собой направляющими колоннами 27, а в левой стороне над ванной 4 установлено приспособление 28 окончательного поштучного разделения плодов и их транспортировки захватного механизма 8. содержащее транспортирующие иглы 29, жестко прикрепленные к верхней раме 25 и предназначенные для захвата и транспортировки яблок из ячеек горизонтальной решетки 9 захватного механизма 8. Число транспортирующих игл 29 равно числу ячеек 10 захватного механизма 8.
Предусмотрен съемник 30 плодов, выполненный в виде пластины 31 (фиг.6), на длинных сторонах которой имеются пазы 32 для прохода игл 29, и предназначенный для
гарантированного снятия яблок с последних. Для вертикального перемещения приспособления 29 по направляющим колоннам 27 служат ролики 33 и планки 34, предназначенные для удержания съемника 30 на
опорах 35, закрепленных на направляющих 23.
Рычажный привод горизонтального перемещения верхней 25 и нижней 26 рам по направляющим 23 образован из пяти последовательно соединенных четырехзвенников: первый AiBiCiDi; второй DiEiFiHi; третий HiPiRiTi; четвертый TiKiLiMi; и пятый MiNiSi, четвертым звеном которого является нижняя 26 и верхняя 25 рамы.
Соотношения кинематических размеров звеньев четырехзвенников рычажного привода горизонтального перемещения следующие. Шатуны Выходные звенья Межцентровые
расстояния
Первый четырехзвенник
45
R1T1-Q75 T1H1-153 HiPi U 5 PiPi U 75 HiPi 1lW
Четвертый четырехзвенник
KiLi
0,7
LiMi
0.7
TiKi TiKi Пятый четырехзвенник
2
TiMi TiKi
1.53
N181 MiNv
Пятый четырехзвенник выполнен центральным коромыслово-ползунным. Каждый из пяти четырехзвенников состоит из входного звена, шатуна и выходного звена, причем четырехзвенники установлены в корпусе 3 последовательно таким образов, что выходное звено предыдущего четырехзвенника жестко соединено с входным звеном последующего четырехзвенника, образуя двуплечий рычаг, соединенный с корпусом 3 шарниром, а шатун каждого из четырехзвенников шарнирно соединен с входным и выходным звеном этих четырехзвенни- ков. Отношение кинематических размеров шатуна, выходного звена и расстояние между центрами шатунов, соединяющих входные и выходные звенья с корпусом 3, к кинематическому размеру входного звена четырехзвенников соответственно составляет: в первом 2:2:1,315:1; во втором .0,5:0,75:1,55:1; в третьем 0,5:0,75:1,53:1; в четвертом 0,7:0,7:1,53:1; в пятом четырех- звеннике отношение шатуна к размеру входного звена равно 2, который является кривошипно-шатунным. На выходном звене первого четырехзвенника закреплена ось 36, на концах которой с двух боковых сторон верхней 25 и нижней 26 рам установлены вторые, третьи, четвертые и пятые четырехзвенники.
Входное звено AiBi является кривошипом 37 и соединено с корпусом 3 шарниром AL Выходное звено каждого из предыдущих четырехзвенников жестко соединено с входным звеном каждого из последующих, образуя двуплечие рычаги 38-41, соединенные с корпусом 3 соответственно шарнирами DiHiTiMi, плечи которых образуют соответственно углы,равные 107,04; 50,16; 135,19; 59,43; 86,92°. Четырехзвенники имеют шатуны 42-46, шарнирно соединенные с входными звеньями каждого из пяти четырехзвенников. Остановка четвертого звена пятого четырехзвенника, а именно верхней 25 и нижней 26 рам в крайнем левом и правом положениях в соответствии с заданной циклограммой (фиг.4) осуществляется за счет того, что входные звенья первого, второго, четвертого четырехзвенников (в период остановки в левой крайнем положении) и первого, третьего и пятого четырехзвенников (в период остановки в правом крайнем положении) находятся при выбранных в результате аналитических расчетов соотношениях кинематических размеров звеньев четырехзвенников в крайних положениях, т.е. в таких положениях, в которых входные звенья и шатуны этих четырехзвенников располагаются по одной прямой. В ванне 5 на листе 47 с отверстиями закреплены усеченные конусы 48, в которых осуществляется ориентация яблок.
Справа между верхней 25 и нижней 26 рамами установлен ориентирующий, фиксирующий и накалывающий механизм 49, состоящий из траверсы 50, установленной с возможностью вертикального перемеще5 ния по направляющим колонкам 27. К траверсе 50 жестко прикреплены штыри 51, на основании которых установлены с возможностью вертикального перемещения плоские упоры 52, предназначенные для прижатия,
0 ориентации и фиксации яблок в усеченных конусах 48. На наружной кольцевой поверхности плоских упоров 52 закреплены подпружиненные фиксаторы 53 (фиг.5), предназначенные для гарантированного снятия
5 сердцевины со штырей 51.
На корпусе 3 жестко закреплена плита 54 с каналами 55 цилиндрической формы, на внутренних кольцевых поверхностях которых выполнены концевые пазы 56 для вхож0 дения подпружиненных фиксаторов 53 и удержания в них плоских упоров 53, а количество каналов 55 в плите 54 равно количеству штырей 51.
5К траверсе 50 с торцовых сторон прикреплены направляющие 57, на которые установлены ролики 58, корпусом которых являются вилообразные пластины 52 с пазами, с которыми, перемещаясь, соеди0 няются планки 34 съемника 30 для осуществления перемещения съемника 30 в вертикальной плоскости. Направляющие 57 предназначены для постоянного соедине ния траверсы 50 с вилообразными пласти5 нами 59 при горизонтальном перемещении траверсы 50. К нижней части вилообразных пластин 19 шарнирно прикреплены тяги 60, а рядом для точности и жесткости конструк-. ции к ним прикреплены стержни 61, установ0 ленные в направляющих 62, закрепленные на корпусе 3. К правой верхней боковой части траверсы 50 жестко прикреплены направляющие штанги 63, установленные в трубчатые направляющие 64, закреплен5 ные в нижней раме 26. Нижний конец направляющих штанг 63 выполнен в виде дополнительных втулок 65 с пазом 66, предназначенным для захвата ролика 67, закрепленного на коротких плечах двуплечих
0 рычагов 22.
Рычажный привод вертикального перемещения образован последовательным соединением трех четырехзвенников: A2B2C2D2; DiE2F2H2; H2P2S2. причем зве5 ном P2S2 третьего четырехзвенника является тяга 60, э четвертым звеном этого четырехзьенника является траверса 50,
Соотношения кинематических размеров звеньев четырехзвенников рычажного
привода вертикального перемещения следующие
Шатуны Выходные звенья Межцентровые
расстояния
Первый четырехзвенник
В2С2 С2Р2 оА2Р2 g д
А2В2А2В2- А2В2
Второй четырехзвенник
F2H2 05 D2h2 - 9 66 D2E2 J ОЖ D2E2
Третий четырехзвенник S2P2
H2P2
3,
при этом третий четырехзвенник выполнен центральным коромыслово-ползунным. Каждый из трех четырехзвенников состоит из входного звена, шатуна и выходного звена, причем четырехзвенники установлены в корпусе 3 последовательно таким образом, что выходное звено предыдущего четырехзвенника жестко соединено с входным звеном последующего четырехзвенника, образуя двуплечий рычаг, соединенный с корпусом 3 шарниром, а шатун каждого из четырехзвенников шарнирно соединен с входным звеном этих четырехзвенников. Отношение кинематических размеров шатуна, выходного звена и расстояние между центрами шатунов, соединяющих входные и выходные звенья с корпусом 3, к кинематическому размеру входного звена равны в. первом четырехзвеннике 2:2:2,8:1, во втором 3:0,5:2,66:1, а в третьем четырехзвеннике соотношение шатуна к размеру входного звена равно 3, который является кривошип- но-шатунным.
На выходном звене первого четырехзвенника закреплена ось 68, на концах которой с двух боковых сторон верхней 25 и нижней 26 рам установлены вторые и третьи четырехзвенники. Входное звено А2В2 является кривошипом 69. Выходное звено каждого из предыдущих четырехзвенников жестко соединено с входным звеном каждого из последующих, образуя двуплечие рычаги 70, 71, плечи, которых образуют соответственно углы AI, А2, Аз, равные 79,91. 161,82, 44,94°.
Двуплечие рычаги 70, 71 шарнирами D2H2 соединены с корпусом 3. Четырехзвенники имеют шатуны 72,73 и 60, которые соединены с входными и выходными звеньями. Остановка в верхнем положении в соответствии с заданной циклограммой обеспечивается тем, что в период остановки четвертого звена третьего четырехзвенника, а именно траверсы 50 ориентирующего фиксирующего и накалывающего механизма 49, все три четырехзвенника находятся (при полученных в результате аналитических расчетов соотношений кинематиче0 ских размеров звеньев четырехзвенников) в крайних положениях.
Входные звенья AiBi и А2В2 соединены между собой зубчатыми колесами 74 и 75 с передаточным отношением I 2, при5 водимыми в движение электродвигателем 76.
Указанные соотношения кинематических размеров звеньев рычажных приводов горизонтального и вертикального
0 перемещения узлов установки являются оптимальными и обеспечивают заданные циклограммы работ исполнительных органов механизмов автомата. Изменение этих соотношений в сторону увеличения или умень5 шения нарушит согласованную работу исполнительных органов механизмов установки. На корпусе 3 установлено режущее устройство 77, состоящее из плиты 78. на которой закреплены неподвижные трубча0 тые комбинированные ножи 79 для вырезки из яблок сердцевины и резки их на дольки, диаметр отверстия их режущей части 80 меньше, чем диаметр отверстия их основания 81.
5 На корпусе 3 закреплены лоток 82, по которому удаляются дольки разрезанных яблок, а ниже - лоток 83, по которому удаляется вырезанная сердцевина яблок. Под режущим устройством 77 установлены лен0 точные конвейеры 84,85, по которым удаляются соответственно вырезанные дольки яблок и вырезанная сердцевина.
Рабочий режим автомата с выходом резанных порций яблок на дольки и вырезан5 ной сердцевиной устанавливается с момента поступления яблок из бункера 1 в ванну 4 в четвертом цикле, а затем в каждом цикле одновременно осуществляется пять операций: 1) подача из бункера пор0 ции яблок в ванну 4; 2) предварительное поштучное разделение в ванне 2 и захват ячейками 10 горизонтальной решетки 9 порции яблок; 3) окончательное разделение порции яблок накалыванием на транс5 портирующие иглы 29,,сбрасывание их в усеченные конусы 48; 4) ориентация, фиксация и накалывание порции яблок на штыри 51; 5) резка комбинированными ножами 79 на дольки и вырезка сердцевины порции яблок.
Цикл определяется промежутком времени, равным одному обороту кривошипа 37 рычажного привода горизонтального перемещения, обеспечивающего перемещение верхней 25 и нижней 26 рам по на- правляющим 23 в правое горизонтальное положение, их остановка (выстой) в правом положении, перемещение плит в левое горизонтальное положение и остановка (выстой) их в левом положении. За промежутки времени остановок (выстоев) рам в крайних правом и левом положениях траверса 50 и съемник 30 дважды перемещаются вверх и вниз за счет двух оборотов кривошипа 69 рычажного привода вертикального переме- щения, а во время горизонтального перемещения рам 25,26 влево и вправо съемник 30 и траверса 50 стоят (выстаивают).
Установка в установившемся режиме работает следующим образом (описывается четвертый цикл с начала работы установки, при котором на всех позициях имеется порция яблок и в одном цикле осуществляется пять операций).
При включенном электродвигателе 76 кривошип 37 рычажного привода горизонтального перемещения поворачивается на 60°, рычаги звеньев пяти последовательно соединенных четырехзвенников: AiBiCtDi; DiEiFiHi; HiPiR-.Ti; TiKiLiMi и MiNtSi, перемещаются, а верхняг. 25 и нижняя 26 рамы движутся по натравляющим 23 в правое крайнее положение с порцией яблок, наколотых на транспортирующие иглы 29 и с порцией яблок - на штырях 51 меха- низма 49, при этом планки 3 I съемника 30( расположенные на опорах J5, жестко закрепленных на направляющих 23, сходят с опор 35 и входят в пазы вилообразных пластин 59, шарнирно соединенных с тягами 60, которые в этот момент стоят (вертикального перемещения нет), а так как ролики 58 вилообразных пластин 59 установлены на направляющих 57. то траверса 50, переместившись в крайнее правое положение, ос- тается соединенной с вилообразными пластинами 59 и с тягами 60. Втулки 65. закрепленные к правой верхней боковой части траверсы 50 ориентирующего, фиксирующего и накалывающего механизма 49, отходят от роликов 67 короткого плеча двух- плечих рычагов 22. 3,э это же время кривошип 69 рычажного привода вертикального перемещения поворачивается на 60° и за счет выбора оптимальных кинематических размеров рычагов звеньев трех последовательно соединенных четырехзвеиников, а именно: AaB2C2D2; DaEaFaH, HaP2S2, четвертым звеном третьего четырехзвенника является траверса 50 (в этот промежуток
времени она стоит). Затем кривошип 37 рычажного привода горизонтального перемещения перемещается еще на 120° и за счет выбора оптимальных кинематических размеров его рычагов и наличия двуплечих рычагов, соединенных под определенными углами, за этот промежуток времени верхняя 25 и нижняя 26 рамы стоят в правом крайнем положении. В это время кривошип 69 рычажного привода вертикального перемещения поворачивается на 60°, при этом рычаги звеньев трех последовательно соединенных четырехзвенников, соеди- иенные с траверсой 50 и тягами 60 механизма 49, перемещаются и траверса 50 опускается с порцией яблок, наколотых на штыри 51, на комбинированные ножи 79 режущего устройства 77. Плоские упоры 52 с подпружиненными фиксаторами 53 входят в кольцевые пазы 55 каналов 55 в плите 54, порция яблок разрезается на дольки, которые удаляются по лотку 82 и далее по ленточному конвейеру 84. Одновременно с механизмом 49 пластина 31.съемника 30 с наколотой на транспортирующие иглы 29 порцией яблок также опускается вниз, а так как размеры выемок по большой стороне пластины 31 съемника 30 меньше размера (диаметра) яблок, то яблоки ими снимаются с транспортирующих игл 29 и опускаются в усеченные конусы 48, закрепленные на листе 47 в ванне 5. Кривошип 69 рычажного привода вертикального перемещения поворачивается еще на 60°, при этом механизм 49 со штырями 51 перемещается вверх относительно плоских упоров 52, удерживающихся подпружиненными фиксаторами 53 на листе 47, за счет чего сердцевины гарантировано остаются в комбинированных ножах 79 и выталкиваются следующими вырезанными сердцевинами из комбинированных ножей 79, падают на лоток 83 и удаляются по ленточному конвейеру 85. Одновременно с механизмом 49 пластина 31 съемника 30 поднимается вверх. Далее кривошип 69 рычажного привода вертикального перемещения поворачивается на 60°, а за это время траверса 50 стоит. Кривошип 37 рычажного привода горизонтального перемещения поворачивается на 60°, рычаги звеньев четырехзвенников перемещаются и рамы движутся по направляющим 23 в крайнее левое положение. Планки 34 выходят из паза вилообразных пластин 59. При таком положении планок 34 приспособление 28 не будет опускаться при вертикальном перемещении траверсы 50 механизма 49. В пазы 66 дополнительных втулок 65, закрепленных к правой верхей
боковой части траверсы 50 механизма 49, при перемещении рам 25, 26 в левое крайнее положение входят ролики 67 коротких плеч двуплечевых рычагов 22.
Кривошип 37 рычажного привода гори- зонтального перемещения поворачивается на 120°, при этом рамы 25, 26 стоят в левом крайнем положении. Кривошип 69 рычажного привода вертикального перемещения поворачивается на 60е и так как планки 34 разъединены с вилообразными пластинами 59, то съемник 30 не перемещается вниз, а движется вниз только траверса 50 механизма 49 со штырями 51 и плоскими упорами 52, в которых закреплены подпру- жиненныё фиксаторы 53. Плоские упоры 52 опускаются на яблоки, находящиеся в усеченных конусах 48, там они фиксируются, ориентируются и опустившими штырями 51 накалываются. А так как траверса 50 ме- ханизма 49 опускается, то и направляющие штанги 63, закрепленные к ее правой верхней боковой части, также опускаются по трубчатым направляющим 64, закрепленным в нижней раме 26. В пазах 66 втулок 65, закрепленных на штангах 63, находятся ролики 67 коротких плеч двуплечих рычагов 22, которые опускаются вниз. Следовательно, ролики 21 длинных плеч двуплечих рычагов 22, установленные в пазы 19 вту- лок 18, поднимаются вверх, а так как они прикреплены к П-образным боковым стенкам 16 горизонтальной решетки 9 захватного механизма 8, то она с яблоками в ее ячейках 10 перемещается вверх по направ- ляющим стойкам 7. А так как П-образные боковые стенки горизонтальной решетки 9 и шибер 2 соединены полосами 20, то и шибер 2 поднимается также вверх: Порция яблок, накопившаяся в бункере 1, переме- щается в ванну 4. Яблоки, находящиеся в ячейках перемещающейся вверх горизонтальной решетки 9 захватного механизма 8, накалываются на транспортирующие иглы 29.
Затем кривошип 69 рычажного привода вертикального перемещения поворачивается еще на 60°. В этот промежуток времени рамы 25, 26 еще стоят в крайнем левом положении, при этом траверса 50 механиз- ма 49 с яблоками на штырях 51 и штанги 63. закрепленные на траверсе 50 с втулками 65 в пазах 66 которых находятся ролики 67 коротких плеч двуплечих рычагов 22, поднимаются вверх, а длинные плечи двуплечих рычагов 22, ролики 21 которых установлены в пазах 19 втулок 13акрепленных на П-об- разных боковых стенках 16 горизонтальной решетки 9 захватного механизма 8, на которых закреплены полосы 20, которые в свою
очередь закреплены на шибере 9, опускаются по направляющим стойкам 7 вниз. Шибер 2 опускается и закрывает бункер , в котором накапливается очередная порция яблок. Горизонтальная решетка 9 захватного механизма 8 опускается на плавающие в жидкости ванны 4 яблоки, которые через патрубки 15, закрепленные на плите 14 горизонтальной решетки 9, нижний конец стенок которых срезан по винтовой линии, которыми яблоки отделяются друг от друга, всплывают, соприкасаются с флажками 12, которые поворачиваются, и поочередно попадают в ячейки 10 горизонтальной решетки 9, а флажки 12 после попадания яблока в ячейку 10 решетки 9 опускаются на ограничительные упоры 13. Затем кривошип 37 рычажного привода горизонтального перемещения поворачивается на 60°, верхняя 25 и нижняя 26 рамы перемещаются по направляющим 23 в правое крайнее положение, и цикл работы установки повторяется.
Предложенная конструкция установки обеспечивает гарантированное поштучное разделение яблок, одновременное выполнение нескольких операций в рабочем цикле, механизацию и синхронизацию работы рабочих органов механизмов установки, что позволяет увеличить ее производительность и надежность работы.
Формул а изобретени я 1. Установка для резки плодов на дольки и вырезки сердцевины, содержащая загрузочный бункер с шибером, корпус, в котором размещены ванны для распределения и ориентации плодов, захватный механизм с ячейками и боковыми стенками, ориентирующий, фиксирующий и накалывающий механизм с направляющими колоннами, рамками и плоскими упорами, режущее устройство с трубчатыми комбинированными ножами и приводы горизонтального и вертикального перемещений узлов установки, отл и ч а ю ща я с я тем, что, с целью повышения производительности и надежности работы, установка снабжена закрепленными шарнирно на корпусе неравноплечими двуплечими рычагами с роликами и съемником плодов захватный механизм снабжен втулками с пазами для размещения в последних роликов длинных плеч двуплечих рычагов и транспортирующими иглами, число которых равно числу ячеек захватного механизма, сьемник плодов выполнен в виде пластины с лазами для прохода транспортирующих игл, боковые стенки захватного механизма выполнены П-образными для размещения между
каждой парой параллельных плоскостей стенки ванны для распределения плодов и прикреплены к втулкам, а также связаны с шибером загрузочного бункера для синхронизации его перемещения, причем съемник плодов оснащен траверсой и роликами для перемещения его в вертикальном направлении по направляющим колоннам ориентирующего фиксирующего и накалывающего механизма, последний снабжен роликами с корпусами для взаимодействия со съемником, выполненными в виде вилообразных пластин, к нижней части которых шарнирно прикреплены тяги, рама ориентирующего фиксирующего и накалывающего механизма имеет трубчатые направляющие с размещенными в них с возможностью вертикального перемещения направляющими штангами, свободные концы тяг через дополнительные втулки с пазами для размещения в последних роликов коротких плеч двуплечих рычагов связаны с упомянутыми направляющими штангами, плоские упоры ориентирующего, фиксирующего и накалывающего механизма имеют подпружиненные фиксаторы, режущее устройство снабжено плитой с каналами цилиндрической формы, число которых равно числу ножей, внутренняя поверхность каждого ножа плиты имеет кольцевой паз для взаимодействия с подпружиненными фиксаторами плоских упоров, диаметр отверстия режущей части трубчатого комбинированного ножа меньше диаметра основания последнего, а на корпусе на участке расположения средней части захватного механизма дополнительно установлены направляющие стойки для перемещения втулок в вертикальном направлении.
2. Установка по п.1,отличающая- с я тем, что привод горизонтального перемещения и привод вертикального перемещения соединены между собой зубчатыми колесами с передаточным отношением 1 2, привод горизонтального перемещения образован из пяти последовательно соединенных четырехзвенников, каждый из которых состоит из входного звена, шатуна и выходного звена, причем четырехзвенники смонтированны на корпусе последоватеяь- 5 но таким образом, что выходные звенья предыдущих четырехзвенников жестко соединены с входными звеньями последующих четырехзвенников с образованием двуплечих рычагов с углами AI 107,04°,
0 Дг 50,1б°, Яз 135,19°, Я4 59,43°. h 86,92°, при этом каждый четырехзвенник шарнирно прикреплен к корпусу, отношение кинематических размеров шатуна, выходного звена и расстояния между
5 центрами шарниров, соединяющих входные и выходные звенья с корпусом, к кинематическому размеру входного звена составляет в первом четырехзвеннике 2:2:1,315:1, GO втором четырехзвеннике 0,5:0,75:1,55:1, в
0 третьем четырехзвеннике 0,5:0,75:1,53:1, в четвертом четырехзвеннике 0,7:0,7:1,53:1, в пятом четырехзвеннике соотношение шатуна к размеру входного звена равно 2, а его четвертым звеном являются связан5 ные между собой рамы ориентирующего, фиксирующего и накалывающего механизма, привод вертикального перемещения выполнен из трех четырехзвенников, аналогичных четырехзвённикам привода го0 ризонтального перемещения, при этом углы двуплечих рычагов составляют AI 79,91°, Д2 161,82°; Аз 44,94°, отношение кинематических размеров шатуна, вы-. ходного звена и расстояния между
5 центрами шарниров, соединяющих входные и выходные звенья с корпусом, к кинематическому размеру входного звена составляет в первом четырехзвеннике 2:2:2,8:1, во втором четырехзвеннике
0 3:0,5:2,66:1, в третьем четырехзвеннике соотношение шатуна к размеру входного звена равно 3, третьим его звеном является тяга ориентирующего, транспортирующего и накалывающего механизма, а четвертым
5 звеном - траверса съёмника плодов.
i
СШШ
Фиг.З

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поштучной подачи плодов | 1988 |
|
SU1644884A1 |
| Машина для резки яблок на долькии ВыРЕзКи СЕРцЕВиНы | 1978 |
|
SU799712A1 |
| Лесопильная рама | 1982 |
|
SU1065189A1 |
| АВТОМАТ ДЛЯ УДАЛЕНИЯ СЕРДЦЕВИНЫ И РЕЗКИ ЯБЛОК | 1990 |
|
RU2007102C1 |
| Устройство для резки плодов на дольки и удаления сердцевины | 1990 |
|
SU1777776A1 |
| Машина для ориентации и резки плодов | 1986 |
|
SU1405787A2 |
| Машина для ориентации и резки плодов | 1978 |
|
SU774533A1 |
| Способ ориентации плодов | 1987 |
|
SU1479063A1 |
| Устройство для резки плодов на дольки и вырезки сердцевины | 1990 |
|
SU1773371A1 |
| Садчик кирпича на печные вагонетки | 1988 |
|
SU1622132A1 |


Изобретение относится к устройствам для переработки яблок и может быть использовано на плодоперерабатывающих предприятиях. Цель изобретения - повышение производительности и надежности работы. Установка для резки плодов на дольки и вырезки сердцевины содержит загрузочный бункер с шибером, корпус, в котором установлены ванна для распределения плодов и ванна для их ориентации. Внутри ванны расположен захватный механизм (ЗМ), боковые стенки которого выполнены П-об- разными. ЗМ полосами соединен с шибером для синхронизации его перемещения. К корпусу шарнирно прикреплены неравноплечие двуплечие рычаги с установленными на их концах роликами, которые являются приводом вертикального перемещения ЗМ. Транспортирующие иглы предназначены для передачи плодов из ЗМ через съемник плодов к ориентирующему фиксирующему и накалывающему механизму, откуда плоды подаются на режущее устройство, где происходит отделение сердцевины и собственно резка плодов на дольки. Полоткам и транспортерам происходит выход из установки долек и вырезанных сердцевин соответственно. Целесообразно приводы горизонтального и вертикального перемещений узлов установки выполнять в виде соединенных рычагов. В данной установке гарантировано поштучное разделение плодов, одновременное выполнение нескольких операций в рабочем цикле, механизация и синхронизация работы рабочих органов, что позволяет увеличить ее производительность и надежность работы. 1 з.п. ф-лы, 6 ил.
S/i Механизм горизонтального перемещения рам
60
180 240
Sz
Механизм Вертикального лг/уемещения ятраВерсб/
360 4,(ерад)
Фиг.4
| Машина для резки яблок на долькии ВыРЕзКи СЕРцЕВиНы | 1978 |
|
SU799712A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Устройство для поштучной подачи плодов | 1988 |
|
SU1644884A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
