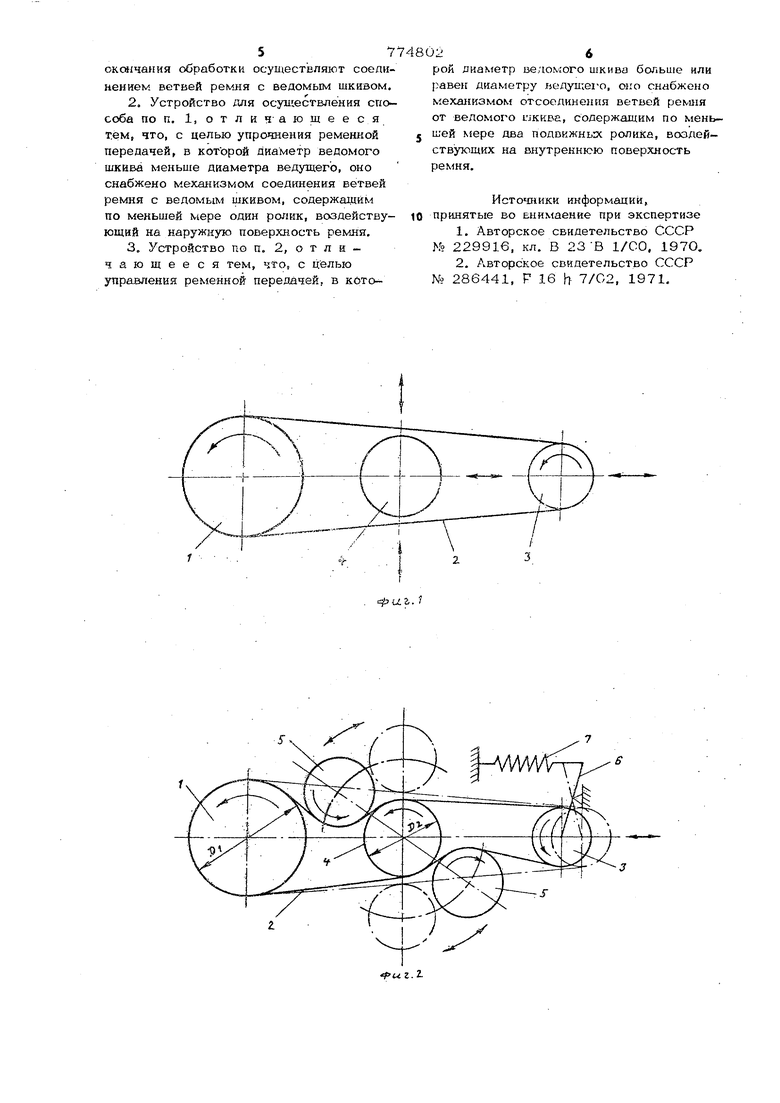
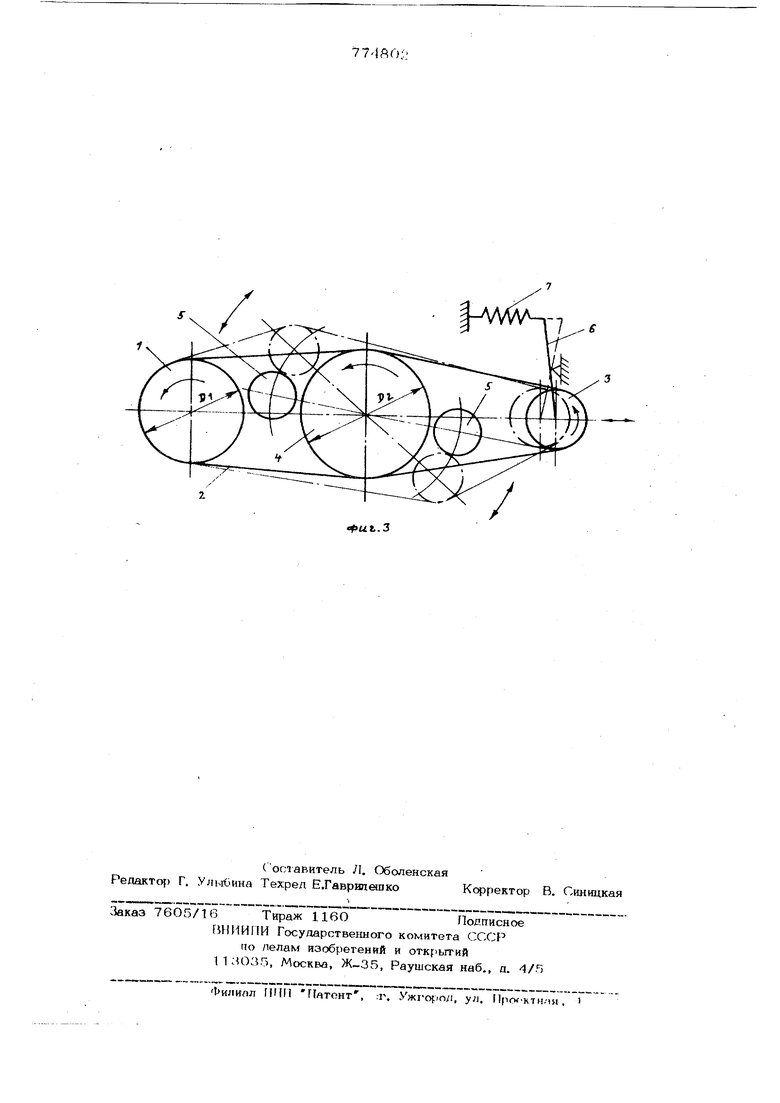
Изобретение относится к металлообработке и может быть использовано при механической обработке на прецкзионкых металлорежущих станках, в которых главньш привод соединен со шпинделем ременной передачей. Известен способ и устройство для управления процессом высокоточной механи ческой обработки на металлорежущих станка снабженных .ременной передачей, соединяющей шпиндель с приводом, в который ведомый шкив расположен между ведущим шкивом и натяжным роликом. Известньй способ включает в себя предварительный разгон шпинделя, отклю-чение привода и последующую обработку за счет накоплен ной шпинделем кинетической энер.гни 2. Недостатком такого способа и устройства для управления процессом высокоточной обработки является наличие специальных дополнительных средств для отключения привола от 1ипинделя, что при водит к усложнению конструкции станков И повышению трудоемкости их.изготовления. Целью изобретения является упрощенне управлением пгюцессом обработки на металл-орежущих прецизионных станках, снабженных ременной передачей, а также соз.дание устройства для управления этой передачей. Для этого отключение привода после его разгона производят посредством отсоединения ветвей ремня от ведомого шкива, а торможение шпинделя после окончания обработки осуществляют соединением ветвей ремня с ведомым шкивом.. Устройство для осуществления способа с целью управления, ременной передачей, в которой диаметр ведомого шкива меньше диаметра ведущего, снабжено механизмом соединения ветвей ремня с ведомым шкивом, содержащим по меньшей мере один ролик, воздействующий на наружную поверхность ремня. В случае использования ременной передачи, в которой диаметр ведомого lUKuna болыло или равен диаметру ведущего, устройство для осуществления способа снабжено механизмом отсоединения ветвей рекдая от ведомого шкива, содерясалшм по меньшей мере два подвижных ролика, воздействующих на внутреннюю поверность ремня. На фиг. 1 изображена принципиальная схема осуществления способа; на фиг. 2 принципиальная схема устройства в случае применения ременной передачи, в которой диаметр ведомого шкива меньше диаметра ведущего; на фиг. 3 - та же схема для случая применения ременной передачи, в которой диаметр ведомого шкива больше или равен диаметру ведущего шкива. Вращение шпинделю передается от пр вода при помощи ременной передачи, ведущий шкив 1 (фиг. 1), которьш, связан ный с приводом, посредством ремня 2 соедкнен с натяжным роликом 3. Ведомый, шкив 4, соединенньй со шпинделем, расположен между ведущим шкивом 1 и натяжным роликом 3. Причем ведомый шкив 4 установлен так, что при наГянутом рокше 2 он не касается его ветве Лля разгона шп1-шделя при включенном приводе ветви рекшя 2 соединяют, с BefloNibiM шкивом 4, которому в результа те этого передается вращение от ведущего шкива 1. По достижении требуемой скорости вращения ветви ремня 2 отводят от ведомого шкива 4, который, продолжая вращаться, обеспечивает обработку за счет накопленной вращающимися массами кинетической энергии, в ре- .зультате чего исключается влияние привода на процесс обработки. Средства для соединения (отсоединения) ветвей ремня с ведомым шкивом могут быть вьтолнены разлиш-гым образом. Так, в случае, когда ведомьй шкив 4 (фнг. 2) установлен между ветвями ремня 2 с зазором (Д Д ) целесообразно ролики 5 расположить со- стороны наружной nosepxiiocTn ремня 2, натяжение которого обеспечивается роликом 3, установленным на 6, поджимаемом пружиной 7. П разгоне шпинделя ролики 5 воздействую на наружную поверхность ремня 2, поджимая его ветви к ведомому шкиву 4 (на чертеже показано сплошной линией) При этом натяжной ролик 3 перемешае ся на поворотном рычаге 6, который ра тягивает пружину 7. После окончания разгона ролики 5 отводят от 2, в результате чсго его ветви под дей- тБием подпружиненного натяжного рошка 3 ОТХОДЯТ от валомог о шкива 4 на чертеже показано штрих-пунктирой линией), обеспечивая его беспреятственное вращение под действием наопленной кинетической энергии. По оконании обработки посредством роликов 5 новь соединяют ветви ремня 2 с ведоым шкивом 4. В случае, когда Д и Д (фиг. 3) ролики 5 располагают стороны внутренней поверхности ремня 2. При разгоне шпинделя ролики 5 не касаются 1ремня, и его ветвй под действием натяжного ролика 3 прижимаются к ведомому шкиву 4 (на чертеже показано сплоьчной линией), в результате чего ему передается сращение от ведущего шкива 1. По окончании разгона ролики 5 воздействую-т на внутреннюю noBepxiiocTb ремня 2 и его ветви выходят из контакта с ведомым шкивом ( на чертеже показано штрихпунктирной линией). Ролики управления ременной передачей в предлагаемом устройстве закрепляются на /поворотном кронштейне, установленном соосно с ведомь шкивом. Описываемые способ и устройство обеспечивают упрощение управления процессом обработки на прецизионных токарных станках, .в которых привод соединен со шпинделем ременной передачей и финишные операции выполняют при отключенном приводе, так как для отключения привода от шпинделя используют ременную передачу без применения дополнительнь Х средств, услохшяющих конструкцию станка. изобретения о р м у л а 1. Способ управления процессом высокоточной механической обработки на металлорежущих станках, снабженных ременной передачей, соединяющей шпиндель с приводом, в которой ведомый шкив расположен между ведущим иживом и натяжным роликом, включающий в себя предварнтельHbrii разгон шпинделя, отключение привода н последующую обработку за счет накопленной кинетической энергии, отличающийся тем, что, с целью упрощения управления процессом обработки, отключение привода от шпинделя пос;ле его разгона производят посредством отсо€дкнения ветвей ремня от ведомого шкива, причем торможение шпшиюлл после
окс 1чания обработки осуществляют соединением ветвей ремля с ведомым шкивом.
2.Устройство для осуществления способа по п. 1, отличающееся тем, что, с целью упрочнения ременной передачей, в которой диаметр ведомого шкива меньше диаметра ведущего, оно снабжено механизмом соединения ветвей ремня с ведомым шкивом, содержащим
по меньшей мере один ролик, воздействующий на наружную поверхность ремня,
3.Устройство по п. 2, о т л н чающееся тем, что, с целью управления ременной передачей, в которой диа(етр ведомого шкива больше или равен диаметру ведущего, оно снабжено механизмом отсоединения ветвей ремня от ведомого шкква, содержащим по меньшей Niepe два ПОДБКЖНЬЯ ролика, воздействующих на внутреннюю поверхность ремня.
Источ11ики информации, принятые во внимаение при экспертизе
1.Авторское свидетельство СССР NO 229916, кл. В 23В 1/СО. 1970.
2.Авторское свидетельство СССР № 286441, Р 16 h 7/02, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления процессом высокоточной механической обработки на металлорежущих станках и устройство для его осуществления | 1981 |
|
SU1087256A1 |
| Способ контроля крутящего момента и устройство для его осуществления | 1978 |
|
SU778939A1 |
| РЕМЕННАЯ ПЕРЕДАЧА | 1989 |
|
RU2019765C1 |
| Ременная передача | 1989 |
|
SU1721338A1 |
| Способ управления процессом механической обработки | 1976 |
|
SU631261A1 |
| Волновой вариатор скорости для привода двухвалковой дробилки | 1980 |
|
SU933108A1 |
| ПЕРЕДАЧА РЕМЕННАЯ | 2018 |
|
RU2668847C1 |
| РЕМЕННАЯ ПЕРЕДАЧА | 1999 |
|
RU2159882C1 |
| Передача с гибкой связью | 1989 |
|
SU1709146A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2001 |
|
RU2226472C2 |
.3
