ния в связи с необходимостью последовательного измерения в нескольких точках характеристики (по крайней мере трех). Кроме того, в таком устройстве трудно измерить мехвничв ;кую характеристику двигателя с ограниченным углом поворота, так как в этом случае из-за присутствия упо ров двигатель при разгоне не можйт достичь режима установившейся ско рости вращения.
Цель изобретения расширен не области применения устройства, а также ускорение процвееа измерения.
Указанная цель в устройстве по настоящему изобретению достигается за счет того, что ь нем измеритель™ иый тормоз выполнен в виде колебательной механической системы, соединенной с датчиков угла поворота, а источник входного сигнала - в виде генератора: синусоидальных колебаний.
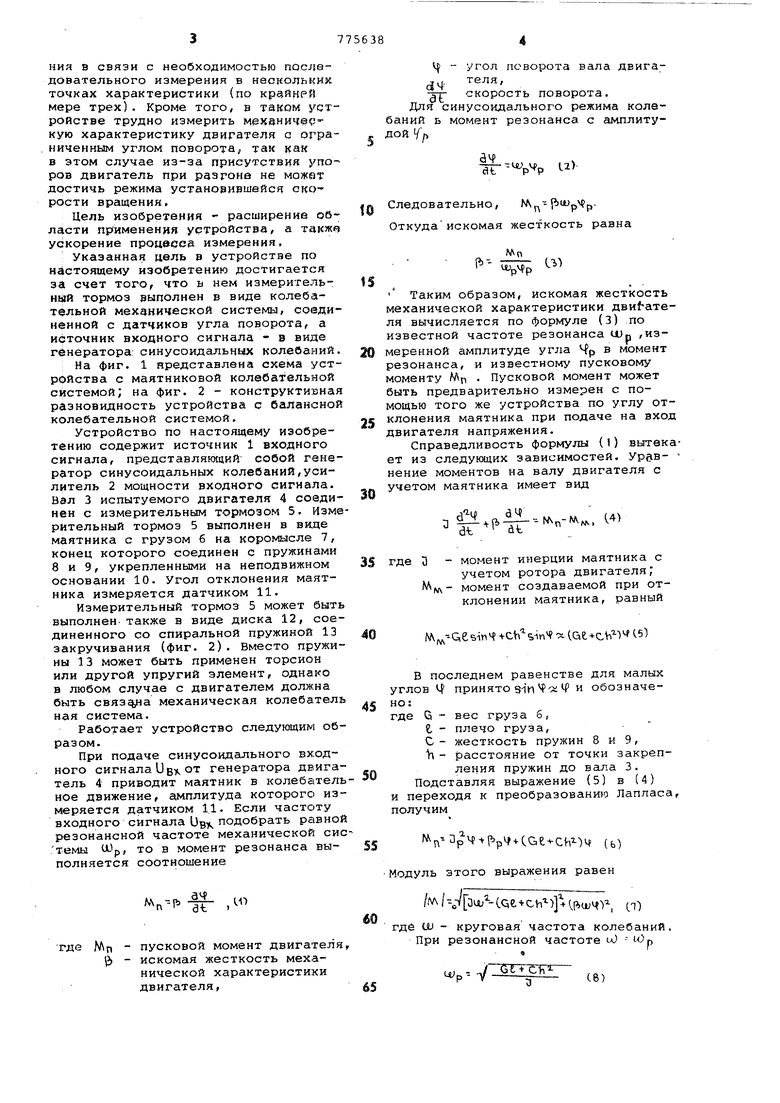
На фиг, 1 нредставлена схема устройства с маятниковой колебательной системой; на фиг. 2 - конструктивная разновидность устройства с балансной колебательной системой.
Устройство по настоящему иэобре тению содержит источник 1 входного сигнала, представляющий собой генератор синусоидальных колебаний,усилитель 2 мощности входного сигнала. Вал 3 испытуемого двигателя 4 соединен с измерительным тормозом 5. Измерительный тормоз 5 выполнен в вкце маятника с грузом б на коромысле 7, конец которого соединен с пружинами 8 и 9, укрепленными на неподвижном основании 10. Угол отклонения маятника измеряется датчиком 11.
Измерительный тормоз 5 может быть выполнен- также в виде диска 12, соединенного со спиральной пружиной 13 закручивания (фиг. 2). Вместо пружины 1 3 может быть применен торсион или другой упругий элемент, однако в любом случае с двигателем быть связка механическая колебатель ная система.
Работает устройство следующим образом.
При подаче синусоидального входного сигнала и Вт, от генератора двигатель 4 приводит маятник в колебательное движение, амплитуда которого измеряется датчиком 11. Если частоту входного сигнала UBX подобрать равной резонансной частоте механической системы р, то в момент резонанса выполняется соотношение
где Мр - пусковой момент двигателя, - искомая жесткость механической характеристики двигателя,
Ц - угол поворота вала двигаd4
-щ- скорость поворота.
Для синусоидального режима колебаний ь момент резонанса с амплитудой if/
- Следовательно, fA -|biUp fp. Откудаискомая жесткость равна
Wn
-
Таким образом, искомая жесткость механической характеристики дви aтeля вычисляется по формуле (3) по известной частоте резонанса UJp ,измеренной амплитуде угла Чр в лoмeнт резонанса, и известному пусковому моменту Мг( . Пусковой момент может быть предварительно измерен с помощью того же устройства по углу отклонения маятника при подаче на вход двигателя напряжения.
Справедливость формулы ()) вытекает из следующих зависимостей. Ур гвнение моментов на валу двигателя с учетом маятника имеет вид
aTcif- - 3S где 3 - момент инерции маятника с
учетом ротора двигателя; момент создаваемой при отклонении маятника, равный
,esin4- Ch.1nЧ-X (Qe.) С5)
В последнем равенстве для малых углов М принято g-in -хФ и обозначе °где G - вес груза б,
t - плечо груза, О- жесткость пружин 8 и 9, - расстояние от точки закрепления пружин до вала 3.
Подставляя выражение (5) в (4) и переходя к преобразованию Лапласа, получим
)4 (ь)
Модуль этого выражения равен
/W / + Ch)4 (.р,и;Ч, П)
где Ш - круговая частота колебаний. При резонансной частоте i-O - loV
,-- -V-SusEi;
lA),
се)
имеет место максимальное отклонение маятника Чр и из выражения (7) получим
(--р.и;рУр, W
что соответствует уравнениям (1) и (2).
Подбирая конструктивные параметры маятника G , С ; 6 , fi , можно определить жесткость механической характеристики в любом ограниченном угле поворота вала двигателядля любой интересующей скорости и различном входном напряжении двигателя.
Преимущество устройства по настоящему изобретению в том, что его можно применять для двигателей с ограниченным углом поворота, для тихоходных моментных двигателей,имеющих большой момент и малую скорость поворюта, а также для исполнительны двигателей всех других видов.
Другим достоинством устройства является ускорение процесса измерения, так как для определения жесткости механической характеристики в любой точке достаточно всего одного замера амплитуды угла отклонения маятника в момент резонанса.
Формула изобретения
Устройство для определения жесткости механической характеристики исполнительного двигателя, содержащее источник входного сигнала, усилитель мощности входного сигнала, измерительный тормоз, соединенный с валом испытуемого исполнительного двигателя, и датчик угла поворота, отличающееся тем,что,с
0 целью расширения области применения и ускорения процесса измерения, в нем измерительный тормоз выполнен в виде колебательной механической системы, соединенной с датчиком уг5ла поворота, а источник входного сигнала выполнен в виде генератора синусоидальных колебаний.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
0 W 16654И кл. G Об G 7/18,04.10.62.
2.Рабкин Г.Л. Экспериментальное исследование судовых автоматических систем. Л., Судостроение,1966, с. 207.
5
3.Авторское свидетельство СССР 241766, кл. G 01 L 3/20,05.09.67 (прототип).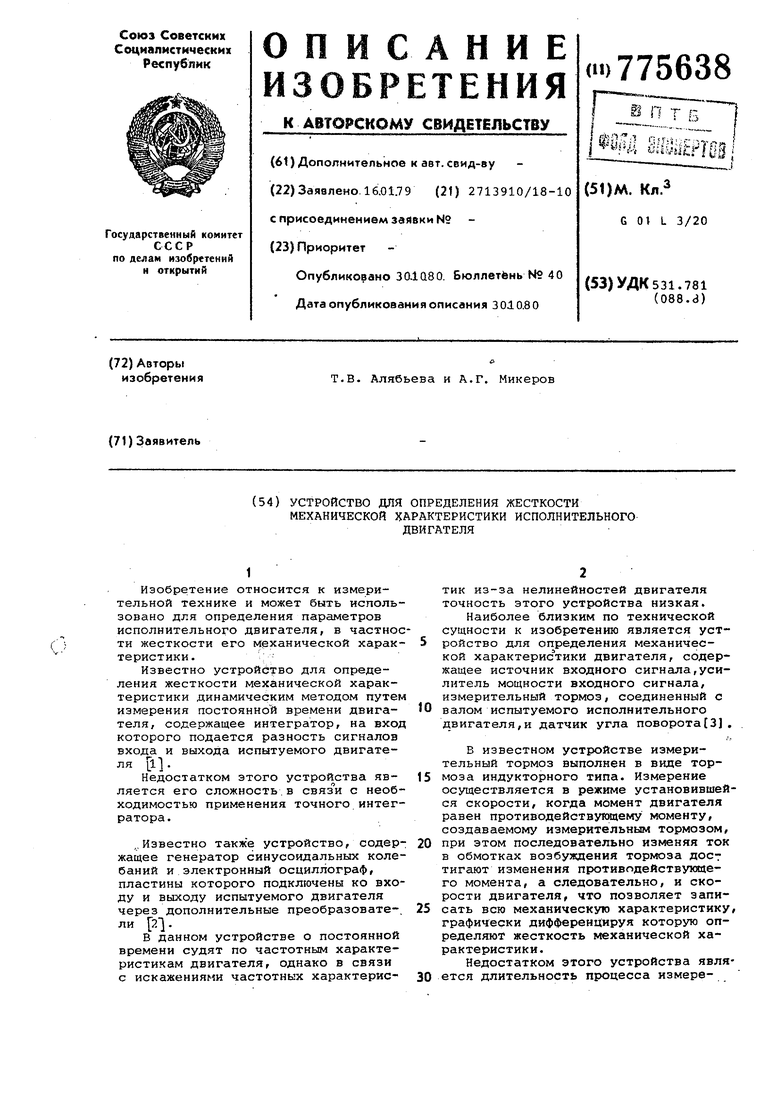
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления гравиметром | 1982 |
|
SU1084728A1 |
| СПОСОБ УПРАВЛЕНИЯ СИНХРОННЫМ ДВИГАТЕЛЕМ В РЕЖИМЕ КОЛЕБАНИЙ | 1991 |
|
RU2025890C1 |
| ВИБРАЦИОННАЯ ИЗМЕЛЬЧИТЕЛЬНАЯ МАШИНА | 2015 |
|
RU2604005C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ХАРАКТЕРИСТИКИ ТРЕНИЯ | 2022 |
|
RU2789985C1 |
| Устройство для определения технического состояния нагнетателя | 1989 |
|
SU1638595A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОМОБИЛЕМ И СПОСОБ УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2017 |
|
RU2677425C1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ДИНАМИКИ ТРАНСПОРТНЫХ МАШИН | 1991 |
|
RU2033600C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ МОТОРНО-ТРАНСМИССИОННОЙ УСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2102715C1 |
| Динамический испытательный стенд | 1983 |
|
SU1117535A1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2012 |
|
RU2575368C1 |
11
