Изобретение относится к прецизионным делительным машинам, используемым для нарезания штрихов на дифракционны.х решетках.
Известны двухвинтовые делительные машины, имеющие ведущую и делительную каретки, ходовые вииты которых кинематически связаны с общим кривошипно-шатуиным механизмом. Однако вследствие дискретного метода подачи заготовки из-за наличия существенной разницы между коэффициентами статического и динамического треиия неремещеиия каретки с заготовкой на малые величины и при малых скоростях ее , наблюдается скачкообразное движение каретки по направляющим. Величина этих скачков к моменту окончания подачи создает дополнительное усилие, действующее через плоские пружины на верхнюю половину каретки со стороны нижней, которое оказывается различным от щтриха к штриху.
Для улучщения качества дифракционных решеток за счет обеспечения постоянства расстояний между нарезаемыми штрихами предлагаемое устройство снабжено дополнительным кривошипно-шатуниым механизмом, который установлен на общем валу с первым. Донолнительпый кривошиппо-шатуиный механизм кипематически связан с ходовым винтом ведущей каретки. Перемещение ведущей
каретки заканчивается раньше остановки делительной каретки. Дальнейшее перемещение делительной каретки осуществляется по неподвижной ведущей каретке, исключая ее
влияние на точность установки заготовки.
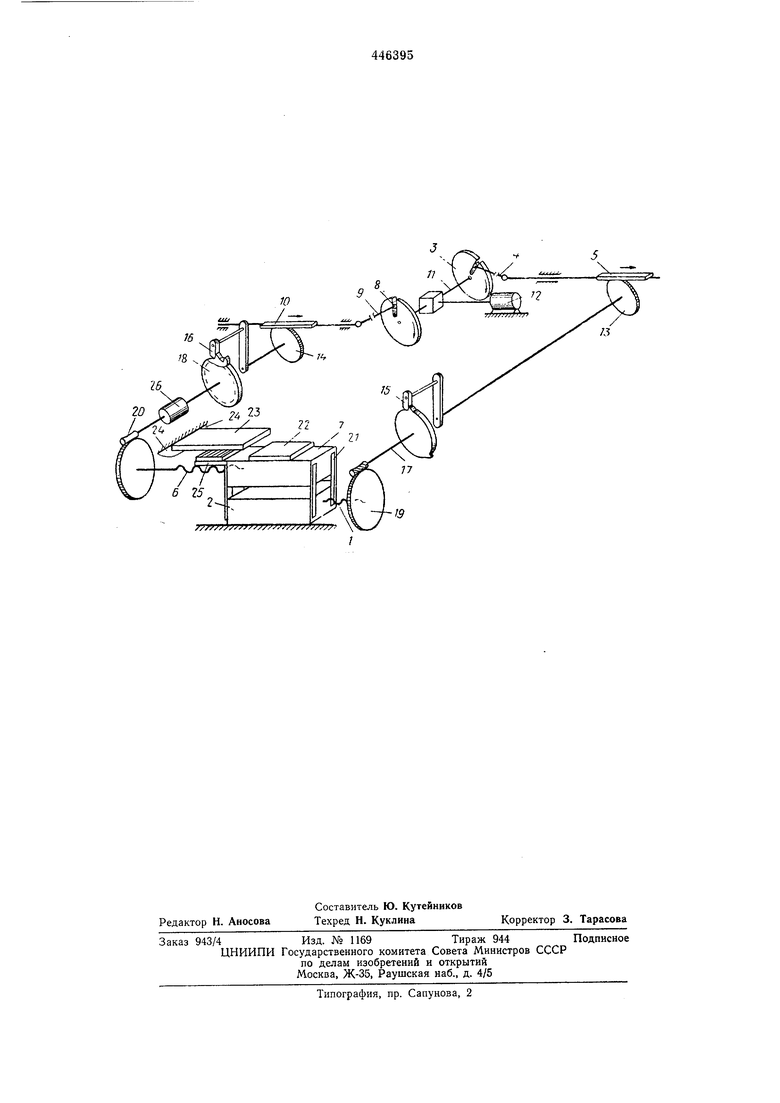
На чертех е изображена кинематическая схема привода подачи заготовки дифракциоппой решетки. Привод подачн заготовки состоит из кривошипио-щатунного механизма, связанного с винтом 1 ведущей каретки 2, состоящего из кривошипа 3, шатуна 4, ползуна-рейки 5, и кривошипно-шатуппого механизма, связанного с винтом 6 дел 1тельной каретки 7, состоящего из кривощипа 8, шатуна 9 и ползунарейки 10. Оба кривошипа закреплены на одном общем валу 11, который приводится в движение электродвигателем 12, причем кривошип 3 развернут по направлению вращения кривощипа 8.
Ползуны-рейки 5 и 10 связаны с зубчатыми колесами 13 и 14, которые при помощи собачек 15 и 16 связаны с храповыми колесами 17 и 18 и через червячные пары 19 и 20 с ходовым винтом 1 ведущей ка зетки 2 и с ходовым винтом 16 делительной каретки 7.
Ведущая каретка 2 и делительная каретка 7 связаны плоскими пружинами 21. Контроль за положением заготовки 22 осуществляется
интерференционным растровым датчиком, состоящим из отражательной дифракционной решетки-шкалы 23, укрепленной неподвижно на станине 24 машины, и прозрачной дифракционной решетки-индекса 25, установленной на делительной каретке. Интерференционный датчик управляет работой электромагнитной муфты 26, установленной между храповым колесом 18 и червячной парой 20.
Привод работает следуюш,им образом.
Враш,ение от электродвигателя 12 передается валу 11 с сидяш,ими на нем кривошипам-и 3 и 8, и с помош,ью последних преобразуется в возвратно-поступательное движение реек 5 и 10. Перемепдаясь, рейки поворачивают на некоторый угол зубчатые колеса 13 и 14, а следовательно, и жестко соединенные с ними собачки 15 и 16. Кинематика привода обеспечивает одновременное зацепление собачек 15 и 16 с храповыми колесами 17 и 18. При перемещении реек 5 и 10 в рабочем направлении электромагнитная муфта 26 включена и обеспечивает жесткую кинематическую связь храпового колеса 18 с червячной парой 20. При дальнейшем вращении кривошипов 3 и 8 вращение зубчатых колес 13 и 14 передается через храповые колеса на червячные пары 19 и 20 далее на ведущий и делительный винты 1 и 6, которые перемещают соответствующие каретки. Поскольку кривошип 3 имеет радиус больший, чем кривошип 8, и развернут в направлении движения, рейка 5 движется с большей скоростью и прекращает свое движение раньше, чем рейка 10, а соответственно, и каретки 7. После остаповки каретки 2 каретка 7 продолжает движение, перемещая заготовку на заданную величину, и фиксируя ее растровым датчиком, который выделяет сигнал на отключение электромагнитной муфты 26, что приводит к размыканию кинематической цепи и к одновременному торможению винта 6, предохраняющего его от дальнейшего поворота. После остановки делительной каретки 7 происходит
профилирование очередного штриха. В этот период вращение кривошипов продолжается, в результате чего начинается холостой ход реек. Вследствие смещения кривошипов перемещение рейки 5 на холостом ходу заканчивается раньше рейки 10, поэтому уже в начале следующего цикла рейка 5 оказывается смещенной. Далее цикл повторяется.
Предмет изобретения
Привод подачи заготовки дифракционной решетки в двухвинтовой делительной машине, имеющей ведущую и делительную каретки, содержащий кривошипно-шатунный механизм, кинематически связанный с винтом последней, отличающийся тем, что, с целью улучшения качества изготовления дифракционных решеток за счет обеспечения постоянства расстояний между нарезаемыми штрихами, привод снабжен вторым кривошипношатунным механизмом, кинематически связанным с винтом ведущей каретки, причем кривошип этого механизма установлен на одном валу с кривошипом первого и развернут в направлении его вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод перемещения исполнительного органа прецизионной делительной машины | 1973 |
|
SU776865A1 |
| ДЕЛИТЕЛЬНАЯ МАШИНА ДЛЯ НАРЕЗАНИЯ ДИФРАКЦИОННЫХ РЕШЕТОК | 1990 |
|
RU2027578C1 |
| Делительная машина | 1958 |
|
SU118618A1 |
| Привод резцовой каретки делительной машины | 1990 |
|
SU1756114A1 |
| Способ шлифования зубьев цилиндрических зубчатых колес и устройство для его осуществления | 1980 |
|
SU925242A3 |
| ПРИВОД УПРАВЛЕНИЯ ПРИСЛОННО-СДВИЖНОЙ ДВЕРИ ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2792906C1 |
| Автоматическое приспособление к станку для резки колец и шайб из трубчатых резиновых заготовок | 1950 |
|
SU87085A1 |
| Автомат для насекания надфилей | 1979 |
|
SU772760A1 |
| Качающийся питатель | 1981 |
|
SU1008108A1 |
| УСТРОЙСТВО ДЛЯ ШЛИФОВАНИЯ ОТВЕРСТИЙ | 1969 |
|
SU430995A1 |