аварийной работы попутной передачи.
Целью изобретения является повышение надежности управления.
Поставленная цель достигается тем, что каждый блок контроля подвижного состава снабжен узлом включения элемента памяти, выход которого соединен с входом бесконтактного датчика подвижного состава, а вход - с выходами инверторов блоков контроля подвижнрго состава, находящихся на выходе зоны останова.
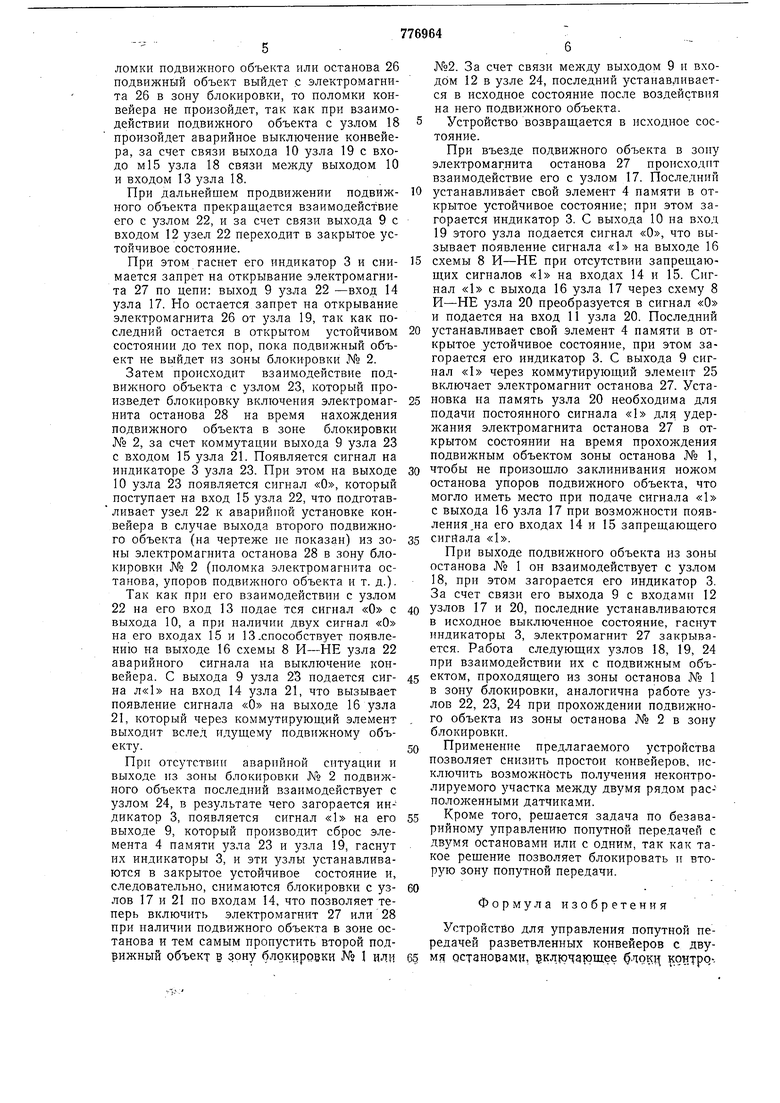
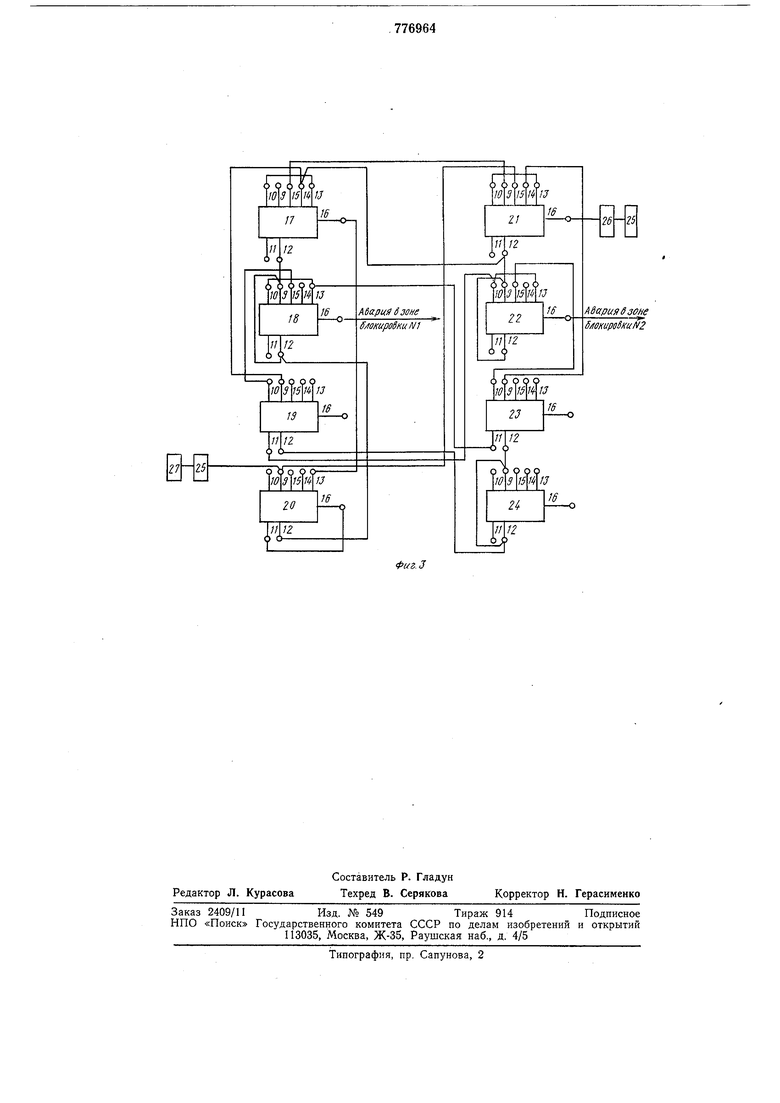
На фиг. 1 представлены блок-схема бесконтактного блока контроля датчика подвижного состава; на фиг. 2 - попутная передача с двумя остановами разветвленного конвейера со схематическим расположением по трассе блоков контроля подвижного состава; на фиг. 3 - схема коммутации блоков контроля подвижного состава.
Устройство содержит узел 1 включения элемента памяти от внешних электрических сигналов других датчиков, бесконтактный датчик 2 подвижного объекта, световой индикатор 3, элемент 4 памяти, схему 5 сброса памяти, инвертор 6, инвертор 7, схему 8 И-НЕ.
В исходно мположении элемент 4 памяти находится в закрытом устойчивом состоянии; на выходе 9 инвертора 7 присутствует сигнал «О, на выходе 10 инвертора 6 - сигнал индикатор 3 не светится.
При взаимодействии подвижного объекта (на чертеже не показан) конвейера с датчиком 2 или пр Йемене сигнала «1 на сигнал «О на входе И узла 1 включения элемента памяти внешним электрическим сигналом последний устанавливают элемент 4 памяти в открытое устойчивое состояние. В результате на выходах 9 и 10 происходит инверсия сигналов - на выходе 9 появляется сигнал «1, а на выходе 10 - сигнал «О, и соответственно появляется сигнал на индикаторе 3.
При прекраш.ении взаимодействия подвижного объекта с датчико м2, а также при подаче сигнала «1 на вход И узла 1 это состояние сохраняется до тех пор, пока на вход 12 схемы 5 сброса памяти не поступит сигнал «1, который переводит элемент 4 памяти в закрытое исходное устойчивое состояние; сигнал на индикаторе 3 исчезает. При подаче на один из входов 13, 14 или 15 (или на все одновременно) схемы 8 И- НЕ сигнала «1 происходит инверсия выходного сигнала, и на выходе 16 выдается сигнал «1. Все перечисленные выше элементы 1-8 образуют узлы 17-24. Устройство также содержит коммутирующие элементы 25, 26 и электромагниты остановов 27, 28.
Устройство работает следующим образом.
В исходном состоянии элемент 4 памяти (см. фиг. 1) в узлах 17-24 находится в закрытом устойчивом состоянии, при этом отсутствует сигнал на индикаторе 3. В результате на выходах 10 имеется сигнал «1, а на выходах 9 - сигнал «О.
В узлах 17-20, за счет коммутации выходов 10 с входами 13 схемы 8 И-НЕ, иа выходах 16 имеются сигналы «О. Электромагниты 27 и 28 находятся в закрытом состоянии.
Коммутация устройств апроизведена так, что при одновременном появлении двух подвижных объектов на электромагнитах 27 и 28 имеет преимущество выхода электромагнит 28. Узел 21 вступает во взаимодействие с подвижным объектом (на чертеже не показан) конвейера, устанавливает последний элемент 4 памяти в открытое устойчивое состояние; загорается индикатор 3; с выхода 9 узла 21 поступает сигнал «1 на вход 14 схемы 8 И-НЕ узла 25, который запрещает появление сигнала «1 на выходе 16 схемы 8 И-НЕ узла 25 на открывание электромагнита 27. Электромагнит 28 при этом открывается за счет снятия сигнала «1 с входа 13 узла 21, поступавшего с выхода 10 этого же узла, что вызывает появление на выходе 16 сигнала «1 узла 21, который через коммутирующий элемент 26 включает электромагнит останова 28, что является разрешением для
дальнейщего продвижения подвижного объекта по трассе конвейера.
Подвижный объект, пройдя электромагнит 28, взаимодействует с узлом 23, в результате чего на его выходе 9 появляется
сигнал «1, загорается индикатор 3. За счет коммутации выхода 19 узла 23 с входом 12 узла 21 последний переходит в исходное устойчивое состояние и гаснет его индикатор 3. При этом электромагнит 28
закрывается. На выходе 10 и входе 13 узла появляется сигнал «О, но на его вход 15 поступает сигнал «1 с выхода 10 узла 23, что является результатом запрета выхода сигнала для аварийной остановки конвейера с выхода 16 узла 22. За счет ком- мутации выхода 10 узла 22 с входом 11 узла 19, последний устанавливает в открытое устойчивое состояние свой элемент 4 памяти. При этом загорается индикатор 3; в ре- зультате на вход 14 узла 17 подается сигнал «1 с выхода 9 узла 19 и кратковременно с узла 22. Эти сигналы являются запретом выхода подвижного объекта с электро- магнита 26.
Установка элемента 4 памяти узла 19 во включенное устойчивое состояние внешним электрическим сигналом происходит от узла 22. Этим ликвидируется неконтролируемый участок конвейера между узлами 22 и
23. И теперь, если подвижный объект по какой-то причине остановится на этом участке, то поломки конвейера не произойдет по той причине, что сигналы запрета не разрещают выход подвижных объектов с электромагнита останова. А если в случае поломки подвинсного объекта или останова 26 подвижный объект выйдет с электромагнита 26 в зону блокировки, то поломки конвейера не произойдет, так как при взаимодействии подвижного объекта с узлом 18 произойдет аварийное выключение конвейера, за счет связи выхода 10 узла 19 с входо м15 узла 18 связи между выходом 10 и входом 13 узла 18.
При дальнейшем продвижении подвижного объекта прекращается взаимодействие его с узлом 22, и за счет связи выхода 9 с входом 12 узел 22 переходит в закрытое устойчивое состояние.
При этом гаснет его индикатор 3 и снимается запрет на открывание электромагнита 27 по цепи: выход 9 узла 22 -вход 14 узла 17. Но остается запрет на открывание электромагнита 26 от узла 19, так как последний остается в открытом устойчивом состоянии до тех пор, пока подвижный объект не выйдет из зоны блокировки № 2.
Затем происходит взаимодействие подвижного объекта с узлом 23, который произведет блокировку включения электромагнита останова 28 на время нахождения подвижного объекта в зоие блокировки № 2, за счет коммутации выхода 9 узла 23 с входом 15 узла 21. Появляется сигнал на индикаторе 3 узла 23. При этом иа выходе 10 узла 23 появляется сигнал «О, который поступает на вход 15 узла 22, что подготавливает узел 22 к аварийной установке конвейера в случае выхода второго подвижного объекта (на чертеже не показан) из зоны электромагнита останова 28 в зону блокировки № 2 (поломка электромагнита останова, упоров подвижного объекта и т. д.).
Так как при его взаимодействии с узлом 22 на его вход 13 иодае тся сигнал «О с выхода 10, а при наличии двух сигнал «О на его входах 15 и 13.способствует появлению на выходе 16 схемы 8 И-НЕ узла 22 аварийного сигнала на выключение конвейера. С выхода 9 узла 23 подается сигна л«1 на вход 14 узла 21, что вызывает появление сигнала «О на выходе 16 узла 21, который через коммутирующий элемент выходит вслед идущему подвижному объекту.
Прп отсутствии аварийной снтуации и выходе из зоны блокировки № 2 подвижного объекта последний взаимодействует с узлом 24, в результате чего загорается индикатор 3, появляется сигнал «1 на его выходе 9, который производит сброс элемента 4 памяти узла 23 и узла 19, гаснут нх индикаторы 3, и эти узлы устанавливаются в закрытое устойчивое состояние и, следовательно, снимаются блокировки с узлов 17 и 21 но входам 14, что позволяет теперь включить электромагнит 27 или 28 при наличии подвижного объекта в зоне останова и тем самым пропустить второй подрижный объект g дону блокировки № 1 или
№2. За счет связи выходом 9 и входом 12 в узле 24, последний устанавливается в исходное состояние после воздействия на него подвижного объекта. Устройство возвращается в исходное состояние.
При въезде подвижного объекта в зону электромагнита останова 27 происходит взаимодействие его с узлом 17. Последний
устанавливает свой элемент 4 памяти в открытое устойчивое состояние; при этом загорается индикатор 3. С выхода 10 на вход 19 этого узла подается сигнал «О, что вызывает появление сигнала «1 на выходе 16
схемы 8 И-НЕ при отсутствии запрещающих сигпалов «1 иа входах 14 и 15. Сигнал «1 с выхода 16 узла 17 через схему 8 И-НЕ узла 20 преобразуется в сигнал «О и подается на вход 11 узла 20. Последний
устанавливает свой элемент 4 памяти в открытое устойчивое состояние, при этом загорается его индикатор 3. С выхода 9 сигнал «1 через коммутирующий элемент 25 включает электромагнит останова 27. Установка на память узла 20 необходима для подачи постоянного сигнала «1 для удержания электромагнита останова 27 в открытом состоянии на время прохождения подвижным объектом зоны останова № 1,
чтобы не произошло заклинивания ножом останова упоров подвижного объекта, что могло иметь место при подаче сигнала «1 с выхода 16 узла 17 при возможности появления.на его входах 14 и 15 запрещающего
сигнала «1.
При выходе подвижного объекта из зоны останова № 1 он взаимодействует с узлом 18, нри этом загорается его индикатор 3. За счет связи его выхода 9 с входами 12
узлов 17 и 20, последние устанавливаются в исходное выключенное состояние, гаснут индикаторы 3, электромагнит 27 закрывается. Работа следующих узлов 18, 19, 24 при взаимодействии нх с подвижным объектом, проходящего из зоны останова № 1 в зону блокировки, аналогична работе узлов 22, 23, 24 при прохождении подвижного объекта из зоны останова № 2 в зону блокировки.
Применение предлагаемого устройства позволяет снизить простои конвейеров, исключить возможность получения неконтролируемого участка между двумя рядом расположенными датчиками.
Кроме того, рещается задача по безаварийному управлению попутной передачей с двзшя остановами или с одним, так как такое решение позволяет блокировать и вторую зону попутной передачи.
Формула изобретения
Устройство для управления попутной передачей разветвленных конвейеров с двумя остановами, .чощ KOHipq-.
ля подвижного состава, которые установлены непосредственно на трассе конвейера в зоне останова, скоммутированы между собой, каждый из которых состоит из бесконтактного датчика иодвил ного состава, элемента памяти, инверторов и схемы ИЛИ- НЕ, отличаюкхееся тем, что, с целью повышения надел ности управления, каждый блок контроля подвижного состава снабжен узлом включения элемента памяти, выход которого соединен с входом бесконтактного датчика иодвижиого состава, а
вход соединен с выходами инверторов блоков контроля подвижного состава, находящихся на выходе зоны останова.
Источники информации, иринятые во внимание при экспертизе
1.Авторское свидетельство СССР Л 463600, кл. В 65G 47/46, 22.01.73.
2.Авторское свидетельство СССР по заявке М 2462301/03, кл. В 65G 15/08, 31.03.77.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления попутной передачей разветвленных конвейеров | 1987 |
|
SU1490052A1 |
| Устройство управления электроприводом останова толкающего конвейера | 1983 |
|
SU1537621A1 |
| СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2104883C1 |
| Устройство для многоточечной сигнализации аварийных состояний | 1984 |
|
SU1205163A1 |
| Устройство управления транспортным потоком сырьевых компонентов стекольной шихты | 1989 |
|
SU1694456A1 |
| Устройство для управления выпуском тележек со складских ответвлений толкающего конвейера | 1985 |
|
SU1316950A1 |
| Устройство для управления выпуском тележек со складских ответвлений толкающего конвейера | 1988 |
|
SU1551632A1 |
| ИНТЕРАКТИВНЫЙ ОБУЧАЮЩИЙ КОМПЛЕКС, ИМИТИРУЮЩИЙ РАБОТУ ГАЗОКОНДЕНСАТНОГО ПРОМЫСЛА | 2020 |
|
RU2758983C1 |
| Устройство магнитной записи | 1983 |
|
SU1078466A1 |
| Устройство управления аппаратом магнитной записи | 1984 |
|
SU1246133A1 |
Ha.nfiae/tSHue движения
