г

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления выпуском тележек со складских ответвлений толкающего конвейера | 1985 |
|
SU1316950A1 |
| Устройство управления попутной передачей разветвленных конвейеров | 1978 |
|
SU776964A1 |
| Устройство для управления выпуском тележек со складских ответвлений толкающего конвейера | 1988 |
|
SU1551632A1 |
| Устройство для управления конвейером | 1982 |
|
SU1082714A1 |
| Устройство управления электроприводом останова толкающего конвейера | 1983 |
|
SU1537621A1 |
| Устройство для управления разветвительной передачей толкающего конвейера | 1983 |
|
SU1119936A1 |
| Устройство управления группой кранов | 1977 |
|
SU698901A1 |
| Линия формования, сушки и садки керамических изделий | 1987 |
|
SU1497015A1 |
| Система управления транспортным конвейером | 1988 |
|
SU1553479A1 |
| Устройство для автоматического центрирования транспортируемых объектов и их выдачи | 1985 |
|
SU1286475A1 |
Изобретение относится к транспортной технике и м.б. использовано в устройствах для управления работой попутных передач. Цель изобретения- повышение надежности устройства путем контроля положения остановок и работы несущего конвейера. Устройство содержит остановы 1,2, подключенные к блокам управления (БУ) 14,15, датчики входов в зону попутной передачи 7,8, выходы которых через элемент ИЛИ 10 и элемент И 11 подключены к элементу 13 память, датчик 9 выхода из зоны попутной передачи, датчики 3,4 наличия подвижного состава и датчики 5,6 положения остановок, подключенные к БУ 14,15. При выходе подвижного состава с останова 1 он взаимодействует с датчиком 7 и через элемент 10,11 подготавливает включение элемента 13. После съезда подвижного состава с датчика 7 на выходе элемента 13 появится сигнал, блокирующий работу БУ 14,15, и остановы 1,2 остаются закрытыми. При неисправности остановов 1, 2 срабатывают датчики 5,6, что приводит к отключению конвейеров. 3 ил.
«
СО
Фиг.
Устройство содержит остановы 1, 2, подключенные к блокам управления (БУ) 14, 15, датчики входов в.зону попутной передачи 7, 8, выходы которых через элемент ИЛИ 10 и элемент И 11 пoдкJTioчeны к элементу 13 ПАМЯТЬ, датчик 9 выхода мз зоны поггг тной передачи, датчики 3, А подвижного состава и датчики 5, 6 Положения остановок, подключенные к БУ 14, 1 i - При выходе подвижного состава с
.-
Изобретение относится к транспортной технике, а именно к устройствам для управления работой попутных передач как с одним, так и с двумя ос- тановами на подвесных толкаюи их конвейерах.
Пель изобретения - повышение надежности устройства путем контроля положения остановов и работы несуще го конвейера.
На фиг. 1 изображен участок трассы подвесного толкающего конвейера, представляющий собой узел попутной передачи с двумя остановами; на фиг. 2 - структурная схема устройства; на фиг. 3 - схема блока управления остановом.
I
В узле попутной передачи (фиг.1) установлены остановы 1 и 2, датчики (3 и 4 наличия подвижного состава в остановах, датчики 5 и 6 положения остановов, датчики 7 и 8 входа в зону попутной передачи, датчик 9 выхо- да из зоны попутной передачи.
Устройство содержит (фиг. 2) эле- мент ИЛИ 10, подключенный к датчикам 7 и В входа в 3oiiy попутной передачи с первым и вторым элементами И 11 и 12, соединенными с элементом ПАМЯТ 13, который подключен к датчику 9 выхода из зоны попутной передачи, к первому 11 и второму 12 элементам И и к первому 14 и второму 15 блокам управления остановами, соединенными между Ьобой, с датчиками 3 и 4 наличия подвижного состава в остановах, с датчиками 5 и 6 положения остановов, с датчиками 7 и 8 входа в зону попутной передачи, с контактами 16 и 17 пускателей и с первым и вторым остановами. Выход второго элемента И 12 подключен к щине К отключения
останова 1 он взаимодействует с датчиком 7 и через элемент. 10, 11 подготавливает включение элемента 13. После съезда подвижного состава с датчика 7 на выходе элемента 13 появится сигнал, блокирующий работу БУ 14, 15, и остановы 1, 2 остаются закрытыми. При неисправности остано- ВОВ 1, 2 срабатывают датчики 5, 6, что приводит к отключению конвейеров, 3 И.П.
25
20
303540
45 Ь JQ
конвейеров. Элемент ПАМЯТЬ 13 представляет собой триггер, у которого вход j - счетный, а вход К - установочный .
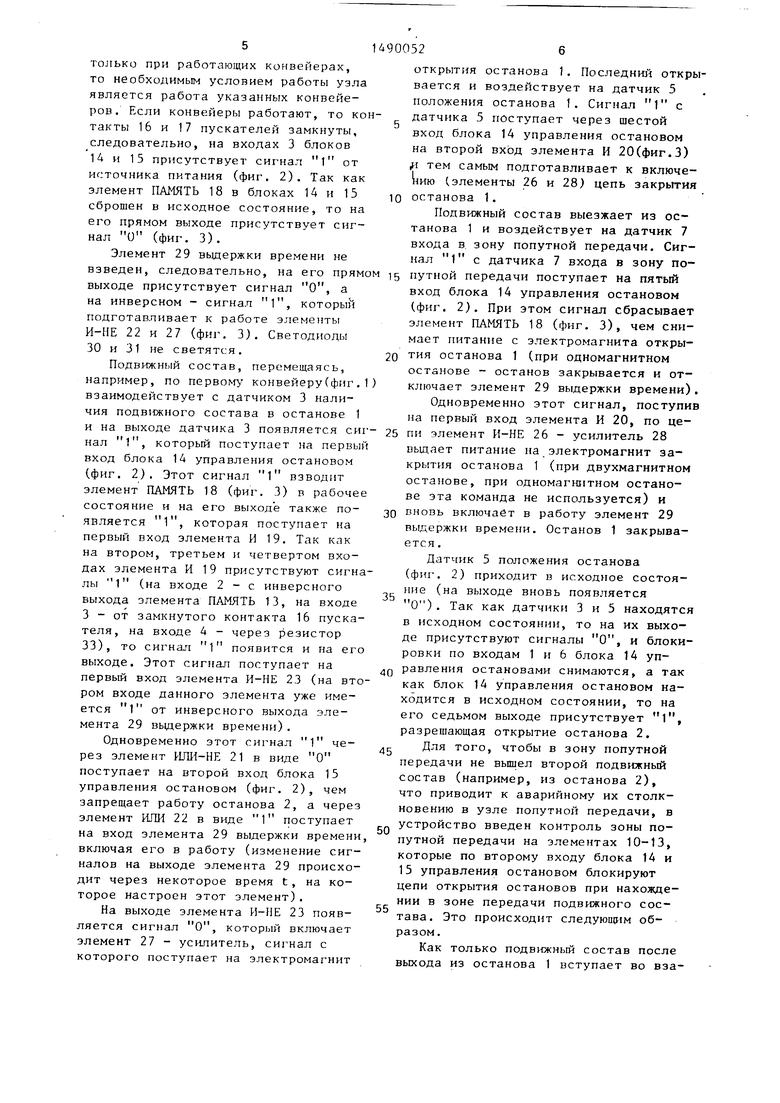
Блоки 14 и 15 управления остановами (фиг. 3) выполнены на базе элементов ЛОГИКА И и содержат элемент ПАМЯТЬ 18, элементы И 19 и 20, элемент 1ШИ-НЕ 21, элемент ИЛИ 22, элементы И-НЕ 23-26, элементы 27 и 28 - усилитель, элемент 29 выдержки времени, светодиоды 30 и 31 и резисторы 32 и 33.
Устройство работает следующим об- раяом.
Рассмотрим работу устройства при условии, что при появлении подвижных составов одновременно в двух остановах преимущество выхода, например, имеет подвижный состав останова 1. Для этого третий выход блока 14 соединен с шестым входом блока 15. Если преимущество выхода имеет второй останов, то необходимо соединить третий выход блока 15 с шестым входом блока 14, а если преимущество не дается ни одному из остановов,то третьи выходы блоков 14 и 15 остаются незадействованными.
После подачи питания и нажатия кнопки Сброс (не показана) элементы ПАМЯТЬ 13 и 18 устанавливаются в исходное состояние. При этом на входах элементов и блоков устройства устанавливаются следуюш 1е значения сигналов, так как элемент ПАМЯТЬ 13 сброшен в исходное состояние, на его инверсном выходе устанавливается сигнал 1, который поступает на первый вход элемента И 11 и на вторые входы блоков 14 и 15 управления остановами (фиг. 2), так как перемещение подвижного состава возможно
5
только при работающих конвейерах, то необходимым условием работы узла является работа указанных конвейеров. Если конвейеры работают, то котакты 16 и 17 пускателей замкнуты, следовательно, на входах 3 блоков 14 и 15 присутствует сигнал 1 от источника питания (фиг. 2). Так как элемент ПАМЯТЬ 18 в блоках 14 и 15 сброшен в исходное состояние, то на его прямом выходе присутствует сиг
нал О (фиг. 3).
Элемент 29 вьщержки времени не
взведен, следовательно, на его прямом 5 путной передачи поступает на пятый
О, а
выходе присутствует сигнал на инверсном - сигнал 1, который подготавливает к работе элементы И-НЕ 22 и 27 (фиг. 3). Светодиоды 30 и 31 не светятся.
Подвижный состав, перемещаясь, например, по nepBONry конвейеру (фиг . 1) взаимодействует с датчиком 3 наличия подвижного состава в останове 1
вход блока 14 управления остановом (фиг. 2). При этом сигнал сбрасывае элемент ПАМЯТЬ 18 (фиг. 3), чем сни мает питание с электромагнита откры 20 тия останова 1 (при одномагнитном останове - останов закрывается и от к мочает элемент 29 выдержки времени Одновременно этот сигнал, поступ на первый вход элемента И 20, по це
и на выходе датчика 3 появляется сиг- 25 пи элемент И-НЕ 26 - усилитель 28
нал
1
который поступает на первый
вход блока 14 управления остановом (фиг. 2). Этот сигнал 1 взводит элемент ПАМЯТЬ 18 (фиг. 3) в рабочее состояние и на его выходе также появляется 1, которая поступает на первый вход элемента И 19. Так как на втором, третьем и четвертом входах элемента И 19 присутствуют сигналы 1 (на входе 2-е инверсного выхода элемента ПАМЯТЬ 13, на входе 3 - от замкнутого контакта 16 пускателя, на входе 4 - через резистор 33), то сигнал 1 появится и на его выходе. Этот сигнал поступает на первый вход элемента И-НЕ 23 (на втором входе данного элемента уже имеется 1 от инверсного выхода элемента 29 выдержки времени).
Одновременно этот сигнал 1 через элемент ИЛИ-НЕ 21 в виде О поступает на второй вход блока 15 управления остановом (фиг. 2), чем запрещает работу останова 2, а через элемент ИЛИ 22 в виде 1 поступает на вход элемента 29 выдержки времени включая его в работу (изменение сигналов на выходе элемента 29 происходит через некоторое время t, на которое настроен этот элемент).
На выходе элемента И-НЕ 23 появляется сигнал О, который включает элемент 27 - усилитель, сигнал с которого поступает на электромагнит
открытия останова 1. Последний открывается и воздействует на датчик 5 положения останова 1. Сигнал 1 с датчика 5 поступает через шестой вход блока 14 управления остановом на второй вход элемента И 20(фиг.З) i тем самым подготавливает к включению (элементы 26 и 28) цепь закрытия останова 1.
Подвижный состав выезжает из останова 1 и воздействует на датчик 7 входа в зону попутной передачи. Сиг- 1 с датчика 7
нал
входа в зону повход блока 14 управления остановом (фиг. 2). При этом сигнал сбрасывает элемент ПАМЯТЬ 18 (фиг. 3), чем снимает питание с электромагнита откры- тия останова 1 (при одномагнитном останове - останов закрывается и от- к мочает элемент 29 выдержки времени) . Одновременно этот сигнал, поступив на первый вход элемента И 20, по це5
вьщает питание на электромагнит закрытия останова 1 (при двухмагнитном останове, при одномагнитном останове эта команда не используется) и
Q вновь включает в работу элемент 29 выдержки времени. Останов 1 закрывается .
Датчик 5 положения останова (фиг. 2) приходит в исходное состояние (на выходе вновь появляется О). Так как датчики 3 и 5 находятся в исходном состоянии, то на их выходе присутствуют сигналы О, и блокировки по входам 1 и 6 блока 14 упд равления остановами снимаются, а так как блок 14 управления остановом находится в исходном состоянии, то на его седьмом выходе присутствует 1, разрешающая открытие останова 2.
Для того, чтобы в зону попутной передачи не вышел второй подвижный состав (например, из останова 2), что приводит к аварийному их столкновению в узле попутной передачи, в устройство введен контроль зоны попутной передачи на элементах 10-13, которые по второму входу блока 14 и 15 управления остановом блокируют цепи открытия остановов при нахождении в зоне передачи подвижного состава. Это происходит следующим образом.
Как только подвижный состав после выхода из останова 1 вступает во вза5
0
5
имодействие с датчиком 7 входа в зону попутной передачи, единичньп1 сигнал с датчика 7 через элемент ИЛИ 10 и первый элемент И 11 подготавливает к включению элемент ПАМЯТЬ 13. После съезда подвижного состава с датчика 7 пoявивlшiйcя на его выходе (дат- 1чика 7) сигнал О взводит элемент ПАМЯТЬ 13 по входу j, в результате чего на его инверсном выходе появляется сигнал О, который блокирует (по вторым входам) работу блоков 14 и 15 управления остановами и последние остаются закрытыми. При выходе подвижного состава из зоны попутной передачи срабатывает датчик 9 выхода из зоны попутной передачи. Единичный сигнал с выхода датчика 9 сбрасывает по второму входу элемент ПАМЯТЬ 13. На инверсном выходе последнего вновь появляется сигнал 1, который разрешает работу блоков 14 и 15 управления остановом.
Выпуск подвижного состава с останова 2 происходит аналогично выпуску из останова 1. При этом в работу включаются датчики 4,6,8 и 9 и блок 15 управления остановом.
Таким образом, повышение надеж- ности осуществляется за счет исключения аварийных ситуаций.
Формула из обретения
Устройство для управления попут- ной передачей разветвленных конвейеров, содержащее два датчика наличия
HcujpaS/tcHue д8ижени9
5 0
О
5
подвижного состава в остановах, два датчика входа в зону попутной передачи, выходы которых подключены к входам элемента ИЛИ, датчик выхода из зоны попутной передачи, подключенный к первому входу элемента ПАМЯТЬ, два Останова и источник питания, о т- личающееся тем, что, с целью повышения надежности, в Hei o введены два датчика положения остановов, два блока управления остановами, два элемента И, к первым входам которых подключен выход элемента ИЛИ, выходы датчиков наличия подвижного состава в остановах, выходы которых подключены соответственно к первым входам блоков управления остановами, к вторым входам которых подключен первый выход элемента ПАМЯТЬ и второй вход первого элемента И, а к третьим входам блоков управления подключен источник питания, к четвертым входам блоков управления оста}1овами подключены соответственно первый и второй датчики входа в зону попутной передачи, а датчики положения остановов подключены соответственно к пятым входам блоков управления остановами, а их nepBbtti и второй выходы подключены к входам остановов, причем третий выход первого блока управления остановом подключен к нкэстому входу второго блока управления остановом, а второй выход элемента ПАМЯТЬ подключен к второму входу второго элемента И.
Фие.З
| Устройство для автоматического управления конвейером | 1973 |
|
SU463600A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство управления попутной передачей разветвленных конвейеров | 1978 |
|
SU776964A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
