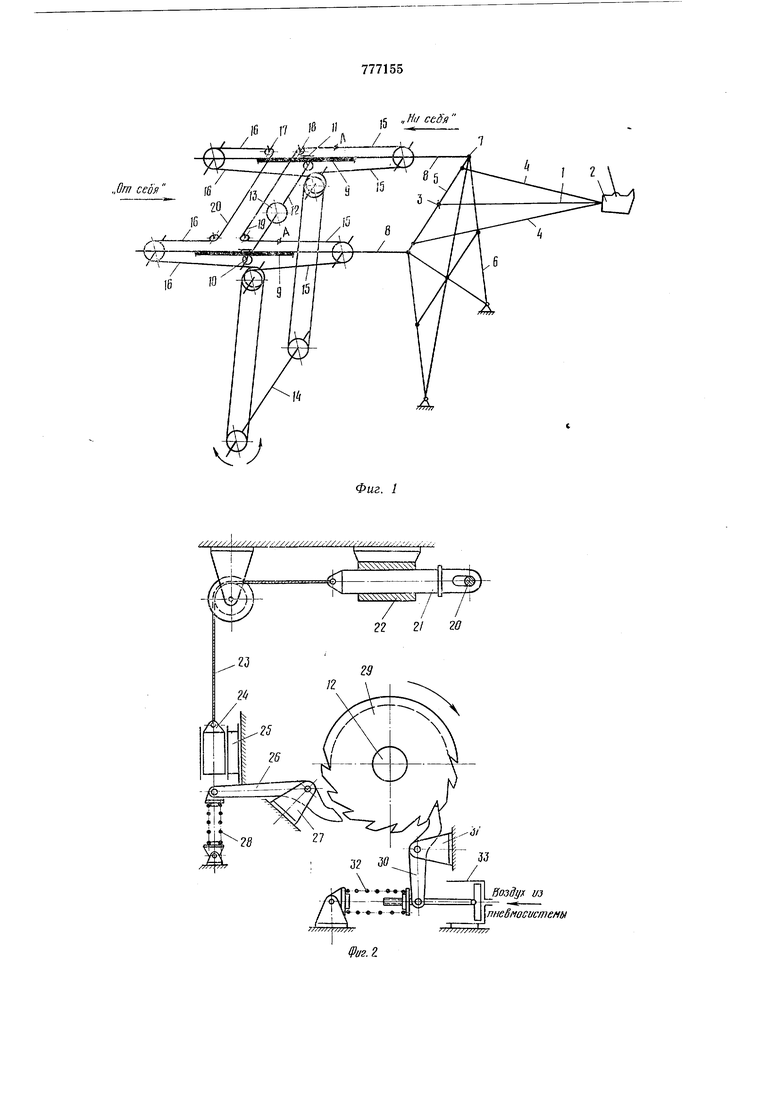
Вал-шестерни 10 соединены между собой жестким валом 12, на котором установлены многодисковые фрикционные тормоза 13. Привод иеремещения наиорных балок 8 осуществляется напорной лебедкой 14 через канатные полиспасты 15 н 16, причем с помощью полиспаста 15 осуществляется движение напорных балок на экскаватор, т. е. «на себя, а с помощью полиспаста 16 - от экскаватора, т. е. «от себя. В каждом полиспасте 15 н 16 между блоками 17 и 18 образованы неподвижные уравнительные части 19 и 20 полиспастов напора. Неподвижные части 20 каната полиспаста напора «на себя пропущены через овальное отверстие ползуна 21, размещенного в направляющих 22. Второй конец ползуна 21 соединен посредством канатика 23 с грузом 24, размещенным в направляющих 25. Груз 24 опирается на плечо собачки 26, шарнирно закрепленной в кронштейне 27 и подпружиненной пружиной 28. Второе плечо собачки 26 взаимодействует с храповым колесом 29 тормоза 13.
При перемещении ковша 2 «на себя крутящий момент от лебедки 14 передается на полиспаст 15, троссы которого находятся постоянно в натянутом состоянии. При наматывании каната на барабаны лебедки 14 напорные балки перемещаются в седловых подшипниках 11. Рейки 9, прикрепленные к напорным балкам 8, заставляют вращаться вал-шестерни 10 и соответственно вал 12 с многодисковыми фрикционными тормозами 13, причем собачка 30 выведена из контакта с храповым колесом 29 тормоза 13.
Тормоз 13 осуществляет два вида торможения: нормальное (при остановке экскаватора или внезапном отключении электроэнергии) и аварийное (при разрыве каната полиспаста напора «на себя).
При нормальном торможении стопором является собачка 30, шарнирно з акрепленная в кронштейне 31. Пружина 132 постоянно удерживает собачку 30 в зацеплении с храповым колесом 29 тормоза 13. Растормаживание происходит при выводе собачки 30 из зацепления с храповым колесом 29 пневмоцилиндром 33.
При обрыве каната полиспаста 15 одновременно в двух местах (например, в точках А) исчезает нагрузка в канатах, груз
24, удерживаемый до обрыва уравнительной частью каната 20 через овальное отверстие в ползуне 22 в неподвил ном состоянии, начинает перемещаться в направляющих 25, сжимает пружину 28 и вводит в зацепление с храповым колесом 29 собачку 26. Таким образом включается тормоз 13, затормаживающий вращение вал-шестерен 10, и напорные балки 8 остаются в неподвижном
состоянии. После устранения аварии и замены канатов полиспастов груз 24 устанавливается в исходное положение и система аварийной остановки напорных балок готова к работе.
Применение изобретения обеспечивает повышение надежности работы механизма коленчато-рычажного напора экскаватора, предохраняет от разрушения его рабочее оборудование при обрыве каната напорного
механизма.
Формула изобретения
1.Механизм коленчато-рычажного напора экскаватора, включающий балансир с напорными балками, перемещаемыми посредством канатно-блочной системы с уравнительным участком, и датчики аварийного включения тормоза наиорных балок, отличающийся тем, что, с целью повышеиия надел ности путем обеспечения срабатывания тормоза при обрыве каната в любом месте, уравнительный участок снабжен механизмом его принудительного перемещения при обрыве каната, установленным с возможностью взаимодействия с датчиком аварийного включения тормоза.
2.Механизм по п. 1, отличающийся тем, что механизм принудительного перемещения уравнительного участка выполнен в виде ползуна, один конец которого соединен с уравнительным участком, а другой - с подвижным грузом, взаимодействующим с тормозом напорных балок.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 334334, кл. Е 02F 3/42, 1966. 2. Экскаваторы для открытых горных работ. Каталог 18-4-77, М., НИИИнформтяжмаш, 1977, с. 9.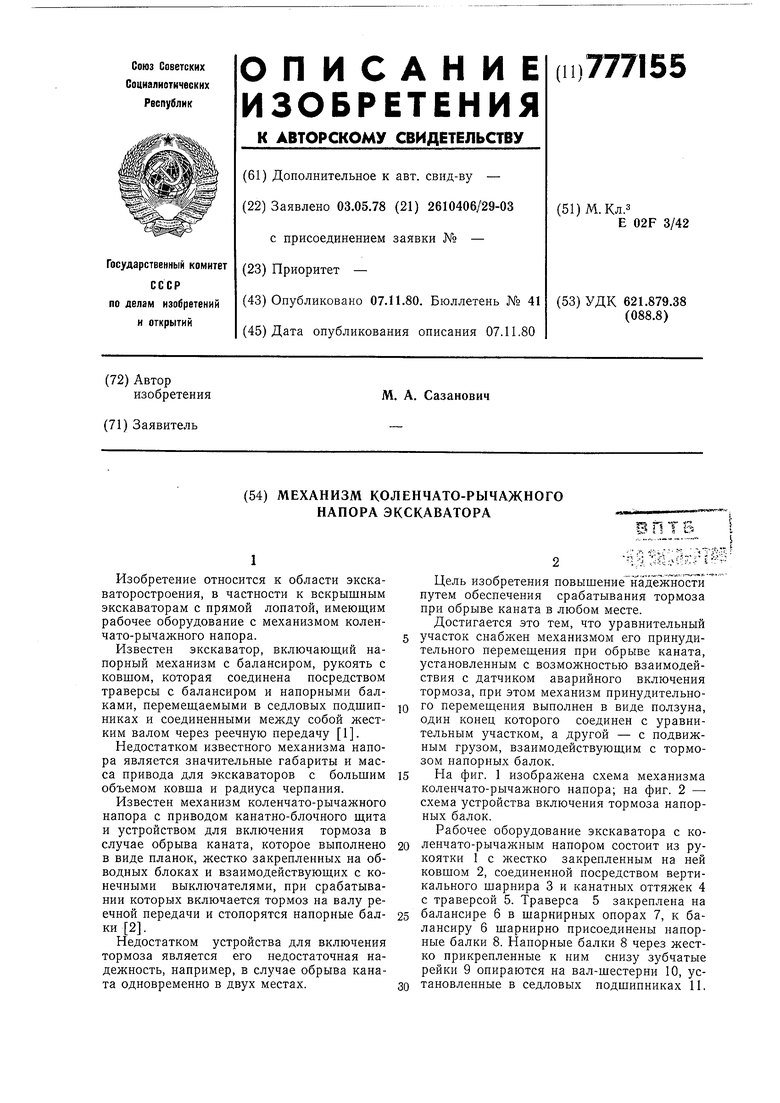

| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РАЗВОРОТЧИК-УСПОКОИТЕЛЬ РАСКАЧИВАНИЯ ГРУЗОЗАХВАТНОГО ОРГАНА | 1993 |
|
RU2048421C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА (ВАРИАНТЫ) | 2008 |
|
RU2407861C2 |
| ПРИВОД НАПОРА КАРЬЕРНОГО ЭКСКАВАТОРА | 2016 |
|
RU2631060C2 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| Ручная лебедка | 1980 |
|
SU919979A1 |
| Экскаватор и его поворотная платформа | 1986 |
|
SU1379412A1 |
| ЭКСКАВАТОР ДЛЯ ПЛАНИРОВАНИЯ И ЗАСЕВА ОТКОСОВ ОТВАЛА | 1992 |
|
RU2024692C1 |
| Рабочее оборудование экскаватора | 1989 |
|
SU1700149A1 |
| Двухбарабанная лебедка | 1979 |
|
SU789370A1 |
| УНИФИЦИРОВАННЫЙ ЭКСКАВАТОР | 2008 |
|
RU2379426C2 |