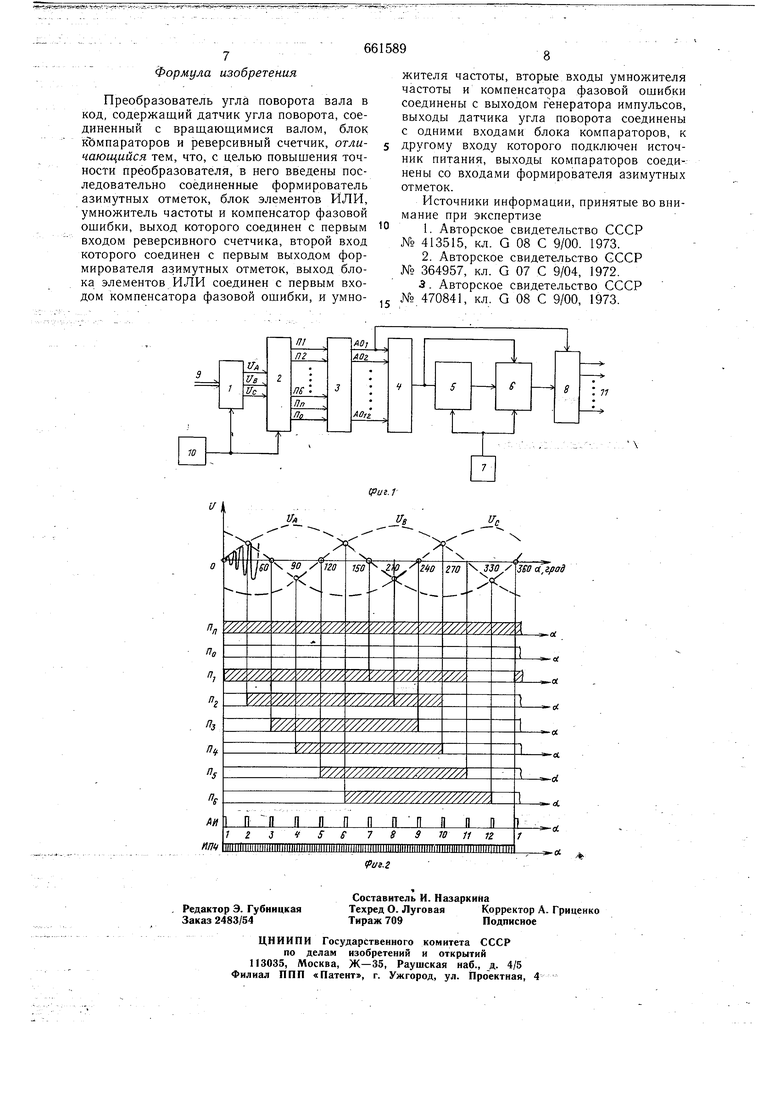
вляется компараторами через дешифратор, управляющими ключами и преобразователем напряжение - код, преобразующем секторные напряжения в код. Изменение угла реверсивного счетчика производится единичными приращениями с вычитающего устройства. Такой преобразователь имеет низкую точность воспроизведения угла поворота вала. Основными источниками погрешности являются демодуляторы, выделяющие огибающие фазных напряжений. Одним из главных недостатков демодуляторов является «дрейф нуля, уменьшение влияния которого возможно только значительным усложнением устройства. Использование преобразователя нанряженне-код значительно усложняет устройство. Больщинство вращающихся объектов обладают инерцией вращающихся частей. Использование данного фактора приводит к упрощению устройства и повыщению разрещающей способности. Данный преобразователь не использует инерционность процессов. Кроме того, в процессе преобразования происходит накопление ошибки воспроизведения угла вращения, которую необходимо периодически сбрасывать (юстировка). Подобный преобразователь не имеет эффективной коррекции ощибки интегрирования, что снижает его функциональные возможности. Целью изобретения является повышение точности преобразователя. Поставленная цель достигается тем, что в преобразователь угла поворота вала в код введены последовательно соединенные формирователь азимутных отметок, блок элементов ИЛИ, умножитель частоты и компенсатор фазовой ошибки, выход которого соединен с первым входом реверсивного счетчика, второй вход которого соединен с первым выходом формирователя азимутных отметок, выход блока элементов ИЛИ соединен с первым входом компенсатора .фазовой ошибки и умножителя частоты, вторые входы умножителя частоты и компенсатора фазовой ошибки соединены с выходом генератора импульсов, выходы датчика угла поворота соединены с одниыи входами блока компараторов, к другому входу которого подключен источник питания, выходы компараторов соединены со входами формирователя азимутных отметок. На фиг. 1 представлена структурная схе-. ма преобразователя угла поворота вала в код. Преобразователь состоит из датчика 1 угла поворота, блока 2 компараторов, формирователя 3 азимутных отметок, блока элементов 4 ИЛИ, умножителя 5 частоты, компенсатора 6 фазовой ошибки, ген ратора 7 импульсов, реверсивного счетчика 8, входного вала 9, блока 10 напряжения питания, выхода 11 реверсивного счетчика. На фиг. 2 представлена диаграмма формирования азимутных отметок, где Уд, U(j, U( -- огнбающие напряжений синхронизации сельсин-датчика, -п Подпоследовательности импульсов совпадающие по фазе с напряжением питания сельсин-датчика и противоположной, П(Пе-области существования последовательностей импульсов, совпадающих по фазе с П(1 и Па , АИ - азимутные импульсы, ИП4 - импульсы повыщенной частоты. Напряжения, снимаемые с фазных обмоток сельсин- датчика 1, описываются следующими уравнениями: Ш Uwisinc t ginJL, Ua UM-sin t sin(jL-120°) U6 Um.-sina t sm(dL.+ 120°), где ид, UB, и Q -мгновенные значения напряжений фазных обмоток датчика, «t. - угол поворота вала, Ujw-напряжение, соответствующее мо-.. менту совпадения обмоток статора и ротора сельсина , и со - частота напряжения питания (возбуждения) . В блоке 2 компараторов напряжения UA, UB, Uc сравниваются попарно между собой и с нулевым уровнем. В точках сравнения, соотвествующих углам поворота (где: К 0, 1, 2,... I), огибающие фазных напряжений (см. фиг. 2) имеют наибольщую крутизну, поэтому на углах получается наибольшая точность фиксации угловых положений ротора сельсин-датчика 1, т.е. формируется 6 азимутных последовательностей (П1+Пе), смена фазы которых относительно фазы напряжения питания несет точную информацию об угловом положении вала, связанного жестко с ротором сельсин-датчика 1. Компараторами сравниваются не огибающие, а сами напряжения. Фронты азимутных последовательностей близки к прямоугольным за счет высокого коэффициента усиления компараторов. Ограничивая замкнутые последовательности по амплитуде до напряжений, позволяющих согла совываться с логическими схемами и, отделяя отрицательную часть (с помощью, например, стабилитронов блока 2 компараторов), получаем азимутные последовательности. Последовательности (По и По), соответствующие по фазе напряжению питания и противоположные, формируются блоком 2 компараторов из напряжения питания. Ограничивающий уровень может быть получен из самого напряжения питания выпрямлением и уменьшением амплитуды без использования дополнительных источников питания. Из азимутных последовательностей (П -Пб) стробированием (П„ или П) и выделением первого и последнего импульсов (можно также из сформированных стробов дифференцированием переднего и заднего фронтов) с помощью формирователя 3 азимутных отметок получают 12 азимутных отметок за оборот вала. Объединяя азимутные отметки элементов ИЛИ 4 и умножая их частоту в m раз (в зависимости от требуемой точности преобразования) с помощью умножителя 5 частоты получают импульсы повышенной частоты (ИПЧ). Азимутные импульсы с выхода элемента 4 ИЛИ умножаются в целое, наперед заданное число раз (т), таким образом, что на выходе умножителя 5 частоты формируются импульсь1 повышенной частоты, равномерно расположенные внутри дискрета азимутных импульсов. При изменении периода азимутных импульсов (в зависимости от скорости вра, щения объекта) изменяется количество импульсов повышенной частоты в зависимости от частоты азимутных импульсов и изменения частоты азимутных импульсов в единицу времени. Умножитель 5 частоты азимутных импульсов осуш,ествляет слежение, за частотой азимутных импульсов и краткое умнох ение, позволяюш;ее экстраполировать значение угла враш,ения инерционного объекта в интервале между двумя соседними азимутными импульсами. Умножитель 5 частоты, может состоять из управляемого делителя частоты, на вход которого подаются импульсы высокой частоты с генератора 7 импульсов, измерителя рассогласования и схемы управления, изменяюилей коэффициент деления управляемого делителя частоты в зависимости от результата рассогласования (отличия частоты импульсов повышенной частоты на выходе управляемого делителя частоты, деленной на m (коэффициент умножения) , от частоты азимутных импульсов и входной частоты азимутных импульсов (зависящей от скорости вращения). При сравнительно низкой частоте азимутных импульсов управляющее воздействие на управляемый делитель частоты изменяется на больщую величину, позволяющую более эффективно компенсировать ошибку по частоте. При высокой частоте азимутных импульсов упраБляю111ее воздействие изменяется на меньшую .величину, чем достигается меньшая динамическая ошибка. В процессе работы умножителя 5 частоты азимутных импульсов воникает ощибка по фазе, обусловленная дискретностью изменения коэффициента деления управляемого делителя частоты. Компенсатор 6 фазовой ощибки делителя частоты. Компенсатор 6 фазовой ошибки осуществляет сброс ошибки по фазе добавлением или вычитанием их выходной последовательности импульсов повыщенной частоты требуемого количества импульсов повышенной частоты. .Кроме того, компенсатор 6 фазовой ошибки производит вычитание или добавление импульсов повышенной частоты на определенных углах в зависимости от коэффициента умножения m для получения с помощью реверсивного счетчика 8 двоичного параллельного кода угла поворота вала. Так, для получения п-разрядного параллельного двоичного кода угла поворота вала на выходе 11 реверсивного счетчика 8 необходимо, N 2 импульсов повышенной частоты. Умножитель 5 частоты азтямутных импульсов позволяет получить Ni -.т импульсовуN Ni±AN , где ср - дискретность азимутных импульсов (в данном случае ч 30°) N.J 12 m Соответствие кода NI двоичному тем больше чем меньше ANN, - N 2 при Т. е. необходимо так выбрать т, чтобы Д N Д N га/ч Nt N±AN () Ф minAN Ф(п, ф, т) Решив вариационную задачу относительно коэффициен тов п, .р, ш в соответствии с их удельными весами, находят minAN, позволяющий оптимально построить схему преобразователя. Веса коэ.ффициентов п, ур, m определяются в зависимости от требуемой точности, инерционности объекта и стоимости реализации. Реверсивный счетчик 8 интегрирует (суммирует) импульсы повышенной частоты для получения двоичного параллельного кода угла поворота. В. процессе интегрирования происходит накопление ощибки, достигающей max на углах 2 (,1,2,...). Для сброса ощибки используется первая азимутная отметка (AOi), совпадающая с углами 25Г1. При изменении направления вращения вала реверсивный счетчик переключается на сложение или вычитание и меняются местами последовательности (Па) и (По) в формирователе азимутных отметок в зависимости от направления вращения. Предложенный преофазователь угла поворота вала в код выгодно отличается от известного. Он легко реализуется на элементах дискретной техники. Использование инерционности вращающегося объекта позволяет существенно упростить устройство и увеличить точность преобразования угла вращения в код за счет экстраполяция углового положения вала в интервале азимутного импульса, экстраполяция производится по предыстории процесса. В предложенном преобразователе точность формирования азимутных импульсов обеспечивЯётся сравнением мгновенных значений фазных напряжений синхронизации, а не их огибающих (выделенных демодулированием). В результате наличия указанных достоинств предлагаемого устройства расширяется сфера его использования и функциональные возможности. Формула изобретения Преобразователь угла поворота вала в код, содержащий датчик угла поворота, соединенный с вращающимися валом, блок компараторов и реверсивный счетчик, отличающийся тем, что, с целью повышения точности преобразователя, в него введены последовательно соединенные формирователь азимутных отметок, блок элементов ИЛИ, умножитель частоты и компенсатор фазовой ошибки, выход которого соединен с первым входом реверсивного счетчика, второй вход которого соединен с первым выходом формирователя азимутных отметок, выход блока элементов ИЛИ соединен с первым входом компенсатора фазовой ошибки, и умножителя частоты, вторые входы умножителя частоты и компенсатора фазовой ошибки соединены с выходом генератора импульсов, выходы датчика угла поворота соединены с одними входами блока компараторов, к другому входу которого подключен источник питания, выходы компараторов соеди-: нены со входами формирователя азимутных отметок. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 413515, кл. G 08 С 9/00. 1973. 2.Авторское свидетельство СССР № 364957, кл. G 07 С 9/04, 1972. 3.Авторское свидетельство СССР № 470841, кл. G 08 С 9/00, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегратор азимутных импульсов | 1976 |
|
SU646348A2 |
| Интегратор азимутных импульсов | 1977 |
|
SU691877A2 |
| Интегратор азимутных импульсов | 1977 |
|
SU736123A2 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1144132A1 |
| Интегратор азимутных импульсов | 1977 |
|
SU732907A1 |
| ИНТЕГРАТОР АЗИМУТНЫХ И/\\ПУЛЬСОВ | 1972 |
|
SU424164A1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU645190A1 |
| Преобразователь угла поворота антенны радиолокационной станции в код | 1983 |
|
SU1119052A1 |
| Преобразователь угла поворота вала в код | 1976 |
|
SU693414A1 |
| Преобразователь угол-код | 1975 |
|
SU520607A1 |
и
3SO
7/УЛ ,
У/7/У/7
