1
Изобретение относится к электротехнике, а именно к устройствам для управления электродвигателями, может быть использо- . вано для регулирования частоты вращения двигателя постоянного тока, например ме- 5 ханизма шагания экскаваторов.
Цикл шагания экскаватора состоит- из последовательного чередования режимов опускания лыж до упора их в грунт, подъема экскаватора над грунтом с одновре- ю менным движением его вперед, опускания экскаватора на грунт и, наконец, подъем и перемещение лыж вперед. Такое чередование обусловлено тем, что механизм шагания представляет собой четырехзвенный i5 кривошипно-рычажный механизм, учитывая, что особенностью всех кривошипных механизмов является наличие «мертвой точки (положение, при котором все шарниры механизма располагаются на одной пря- 20 мой), то при подъеме экскаватора (движение до «мертвой точки) двигатель привода работает в двигательном режиме, а при опускании экскаватора на грунт (движение после прохождения «мертвой точки) дви- 25 гатель начинает работать в генераторном (тормозном) режиме. Такое изменение в , работе двигателя связано с тем, что на механизм шагания при опускании начинает действовать вращающий момент, создавае- зо
мый весом экскаватора и совпадающий с направлением вращения привода. При этом частота вращения становится выше рабочей. Опускание экскаватора при такой большой скорости вызывает удары его о грунт, а динамические усилия, возникающие при этом, могут вызвать поломку металлоконструкций и длительный простой экскаватора в ремонте. Поэтому для плавной, без ударов, посадки экскаватора на грунт частоту вращения двигателя снижают до величины, составляющей 0,25 рабочей частоты вращения. В дальнейшем частоту вращения двигателя увеличивают до рабочей величины, обеспечивающей заданное время цикла шагания. В процессе шагания экскаватора очень важно следить за моментом перехода кривошипа механизма шагания через «мертвую точку для того, чтобы вовремя снизить частоту вращения двигателя.
По основному авт. свид. № 418949 известно устройство для управления электроприводом постоянного тока, которое выполнено по системе управляемый преобразователь-двигатель с двухконтурной системой подчиненного регулирования {.
Известное устройство содержит пропорциональный регулятор напряжения с задатчиком скорости на входе и ограничителем
в цепи обратной связи и пропорциональноинтегральный регулятор тока, а для получения возмол ности независимой настройки контуров регулирования вход регулятора напряжения дополнительно соединен с датчиком .тока.
Недостатком известного устройства является то, что управление частотой вращения двигателя в режиме опускания и подъема экскаватора осуществляется вручную мащинистом с помощью задатчика скорости. Этот недостаток обусловлен тем, что величина коэффициента положительной обратной связи по току, подключенной на вход регулятора напряжения, обеспечивая требуемую жесткость механической характеристики двигателя, не вызывает изменения частоты вращения его в требуемых пределах при изменении режима работы привода.
Поскольку управление частотой вращения двигателя осуществляется вручную (мащинист визуально по взаимному положению звеньев кривошипно-рычажного механизма определяет момент перехода «мертвой точки), то не исключаются случаи ударов экскаватора о грунт, что вызывает динамические нагрузки, которые приводят к появлению трещин в металлоконструкциях.
Целью изобретения являются автоматизация процесса управления и уменьщение динамических нагрузок в механизме.
Для достижения указанной цели в предлагаемом устройстве вход регулятора напряжения дополнительно соединен через введенный полупроводниковый диод с датчиком тока. Данная цепь, являясь положительной обратной связью по току, автоматически вступает в работу только в режиме опускания экскаватора на грунт, а коэффициент обратной связи обеспечивает положительную жесткость механической характеристики и автоматическое снижение частоты вращения двигателя до величины 0,25 рабочей частоты вращения.
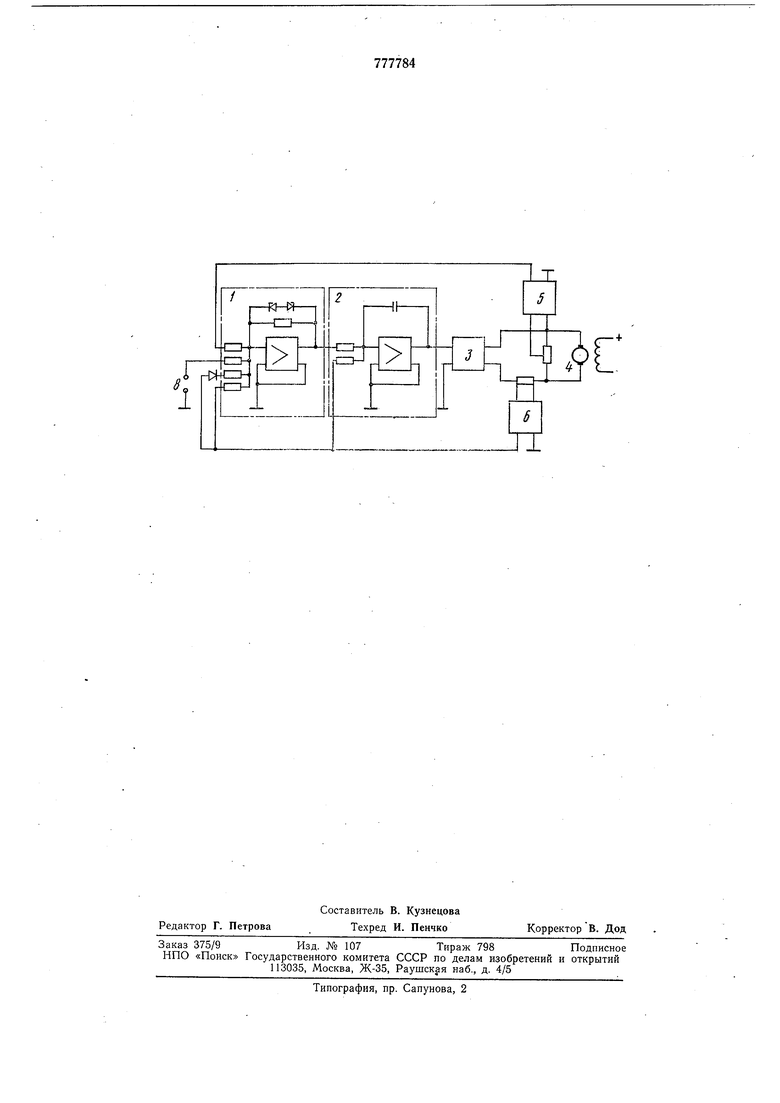
На чертеже изображена функциональная схема устройства управления электроприводом.
Устройство сйдержит пропорциональный регулятор 1 напряжения с ограничением в цепи обратной связи, пропорционально-интегральный регулятор 2 тока, управляемый преобразователь 3, электродвигатель 4 постоянного тока, датчик 5 напряжения, датчик 6 тока, полупроводниковый диод 7, задатчик 8 скорости.
Устройство работает следующим образом.
На один из входов регулятора 1 напряжения от задатчика 8 скорости подается неизменный во времени сигнал задания рабочей частоты вращения. На этой частоте вращения начинается осуществление режимов цикла щагания-опускание лыж и
подъем экскаватора, электродвигатель 4 работает в двигательном режиме, обратная связь по току, подключенная через диод 7 к входу регулятора напряжения, не работает. Как только кривошип механизма щ-агания прошел свою верхнюю «мертвую точку, электродвигатель 4 под действием веса экскаватора разгоняется выше заданной рабочей частоты вращения, электродвигатель 4 переходит в генераторный (тормозной) режим, изменяется направление тока в якорной цепи электродвигателя. В этот момент вступает в работу обратная связь по току, подключенная через полупроводниковый диод 7 на вход регулятора напряжения. Сигнал этой обратной связи по току направлен встречно сигналу задатчика скорости. Поскольку ток электродвигателя 4 при переходе в тормозной (генераторный) режим изменяется плавно, то и.сигнал обратной связи по току с диодом 7 увеличивается плавно, вызывая плавное уменьщение выходного сигнала регулятора напряжения, что приводит к автоматическому снижению частоты вращения электродвигателя, обеспечивая плавность опускания экскаватора на грунт. После опускания экскаватора на грунт электродвигатель 4 переходит в двигательный режим, ток в якорной цепи электродвигателя меняет свое направление, обратная связь по току с диодом 7 прекращает свое действие, вызывая увеличение выходного сигнала регулятора напряжения, частота вращения электродвигателя 4 увеличивается до заданной рабочей частоты вращения, происходит подъем лыж. Дальще цикл шагания повторяется.
Использование известного устройства для управления электроприводом механизма шагания обеспечивает автоматический процесс щагания экскаватора, что особенно важно при длительном шагании, поскольку машинист освобождается от напряженной, требующей постоянного внимания работы. Устройство исключает удары экскаватора о грунт в режиме его опускания и уменьшает динамические нагрузки, что увеличивает срок службы и уменьшает затраты на ремонт металлоконструкции экскаватора..
Формула изобретения
Устройство для управления электроприводом постоянного тока по авт. свид. № 418949, отличающееся тем, что, с целью уменьшения динамических нагрузок механизма, в него введен диод, через который выход датчика тока дополнительно соединен с входом регулятора напряжения.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 418949, кл. Н 02Р 5/06, 1970 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2309890C2 |
| Гидропривод ходового оборудованияшАгАющЕгО эКСКАВАТОРА | 1979 |
|
SU810914A1 |
| Электропривод | 1985 |
|
SU1307522A1 |
| Способ ограничения динамических усилий в механизме экскаватора и устройство для его осуществления | 1987 |
|
SU1490233A1 |
| Электропривод с упругой механической связью между электродвигателем и механизмом | 1984 |
|
SU1277330A1 |
| Устройство для ограничения динамических нагрузок копающих механизмов экскаватора | 1990 |
|
SU1740571A1 |
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1990 |
|
SU1768720A1 |
| Способ управления электроприводом одноковшового экскаватора и устройство для его осуществления | 1988 |
|
SU1629423A1 |
| Устройство для ограничения динамических усилий в механизме экскаватора | 1977 |
|
SU866074A1 |
| Электропривод с ограничением динамических усилий в механизмах экскаватора | 1987 |
|
SU1582314A1 |