Управление и установка кабины 1 у окна 4 (остановка осуществляется только для загрузки кабины) производится при помощи местных постов управления (на чертеже не показаны).
Подъемник работает следующим образом.
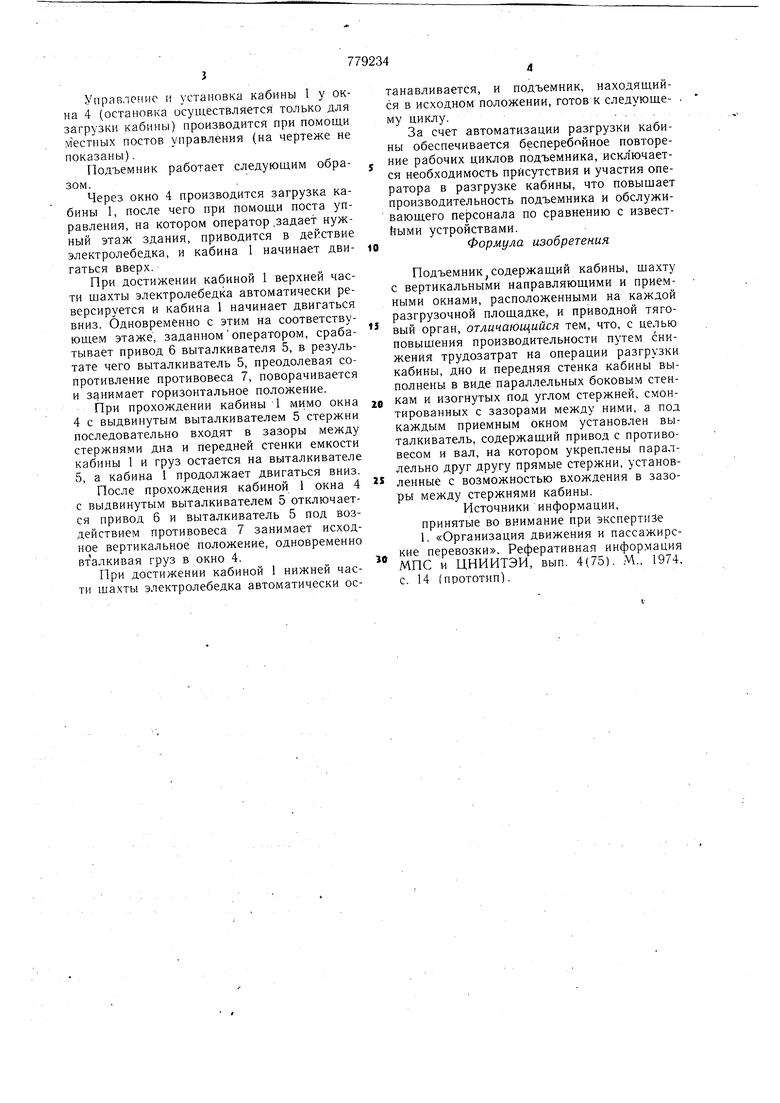
Через окно 4 производится загрузка кабины 1, после чего при помощи поста управления, на котором оператор .задает нужный этаж здания, приводится в действие электролебедка, и кабина 1 начинает двигаться вверх.
При достижении кабиной 1 верхней части шахты электролебедка автоматически реверсируется и кабина 1 начинает двигаться вниз. Одновременно с этим на соответствующем этаже, заданном оператором, срабатывает привод 6 выталкивателя 5, в результате чего выталкиватель 5, преодолевая сопротивление противовеса 7, поворачивается и занимает горизонтальное положение.
При прохождении кабины1 мимо окна 4 с выдвинутым выталкивателем 5 стержни последовательно входят в зазоры между стержнями дна и передней стенки емкости кабины 1 и груз остается на выталкивателе 5, а кабина 1 продолжает двигаться вниз.
После прохождения кабиной 1 окна 4 с выдвинутым выталкивателем 5 отключается привод 6 и выталкиватель 5 под воздействием противовеса 7 занимает исходное вертикальное положение, одновременно вталкивая груз в окно 4.
При достижении кабиной 1 нижней части шахты электролебедка автоматически останавливается, и подъемник, находящийся в исходном положении, готов к следующему циклу.. За счет автоматизации разгрузки кабины обеспечивается бесперебойное повторение рабочих циклов подъемника, исключается необходимость присутствия и участия оператора в разгрузке кабины, что повыщает производительность подъемника и обслуживающего персонала по сравнению с известЬыми устройствами.
Формула изобретения
Подъемник содержащий кабины, щахту с вертикальными направляющими и приемными окнами, расположенными на каждой разгрузочной площадке, и приводной тяговый орган, отличающийся тем, что, с целью повышения производительности путем снижения трудозатрат на операции разгрузки кабины, дно и передняя стенка кабины выполнены в виде параллельных боковым стенкам и изогнутых под углом стержней, смонтированных с зазорами между ними, а под каждым приемным окном установлен выталкиватель, содержащий привод с противовесом и вал, на котором укреплены параллельно друг другу прямые стержни, установленные с возможностью вхождения в зазоры между стержнями кабины.
Источники информации, принятые во внимание при экспертизе 1. «Организация движения и пассажирские перевозки. Реферативная информация МПС и ЦНИИТЭИ, вып. 4(75). М., 1974, с. 14 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Тележечный конвейер | 1972 |
|
SU484139A1 |
| Подъемник для штучных грузов | 1974 |
|
SU516601A1 |
| ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО | 2005 |
|
RU2302990C1 |
| ЧЕТЫРЕХСЕКЦИОННЫЙ АВТОМОБИЛЬНЫЙ ЛИФТ ДЛЯ АВТОМОБИЛЬНЫХ ПАРКОВОК | 2015 |
|
RU2587671C1 |
| Устройство для вертикального транспортирования штучных грузов | 1981 |
|
SU1017634A1 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ПОДЪЕМНОГО УСТРОЙСТВА | 2015 |
|
RU2618862C2 |
| ВЫСОТНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА И СПОСОБ ЕЕ ВОЗВЕДЕНИЯ | 1997 |
|
RU2120011C1 |
| БАШЕННАЯ МНОГОЭТАЖНАЯ АВТОСТОЯНКА-АВТОМАТ | 1994 |
|
RU2081982C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОДЪЕМНО-ТРАНСПОРТНОЙ МАШИНОЙ | 1996 |
|
RU2112735C1 |
| Устройство для подачи груза в проем здания | 1982 |
|
SU1022926A1 |

