Изобретение относится к хе;пезнод рожному транспорту и может быть использовано в схемах управления элек тропневматическими торуюзами железнодорожного подвижного средства. Известно устройтсво для управления электропневматическим тормозом железнодорожного транспортного сред ства, содержащее электромагнитные вентили торможения и отпуска, соеди ненные с рабочим проводом, контроль ный провод с сигнальным устройством соединенный с контрольным реле, и блок цепи управления, снабженный смонтированным нем ртпускнш и то мозньм электрическим реле и блоком дублированного электрического питания с исполнительным реле, которое включено в цепь управления через нормально замкнутый контакт контрол ного реле . Недостатком устройства является сложность и недостаточная эффективность из-за отсутствия дистанционно го управления тормозами. Наиболее близким по техническому решению к предлагаемому устройству является устройство для управления электропневматическим тормозом железнодорожного транспортного сред.2 ства, содержащее электромагнитные вентили торможения и перекрыши,соединенные с .рабочим проводом, контрольный провод, к которому подключены .сигнальный блок, соединенный с контрольным реле, и блок цепи управ-. Ления, снабженный электрическими реле торможения и перекрыши, и кон;Троллер 21. . Однако это устройство обладает . недостаточной эффективностью действия из-за отсутствия дистанционного управления тормозами. Цель изобретения - повьшение эффективности действия за счет дистанционного управления электропневматическйм тормозом. Пост.авленная цель достигается тем, что устрюйство снабжено кнопками отпуска и торможения, блоком автоматической перекрыши, логическими элементами ИЛИ, И и датчиком давления тормозных цилиндров, причем вход реле торможения блока цепи управления подключен к выходу первого логического элемента ИЛИ, один из вводов которого соединен с выходом контроллера крана машиниста в тормозном , положении последнего, другой вход первого логического элемента ИЛИ подт
ключей к источнику питания через к рнтакт кнопкой торможения/ а вход ре л е пёрекр ыши блока цепи управления подключен к выходу другого логического элемента ИЛИ, один из входов которого соединен с выходом контроллера крана машиниста в положе1;ии перёкрыши последнего, другой вход Btoporo логического элемента ИЛИ сое дйн е нс выходом первого логического элемента И, к входам которого под- . ключены, соответственно, контакты кнопок торможения, отпуска и выход блока авгоматической пере крыши, вход которого связан с выходом третьего логического элемента.ИЛИ, один из входов которого соединен с источником питания через контакт кнопки торможения, а другой вход связан с выходом другого логического элемента И, входы которого соединены, соответственно, с. выходами блока автоматической перекрыши датчика давления тормозных цилиндров и контроллера крана машиниста в отпускном положении последнего.
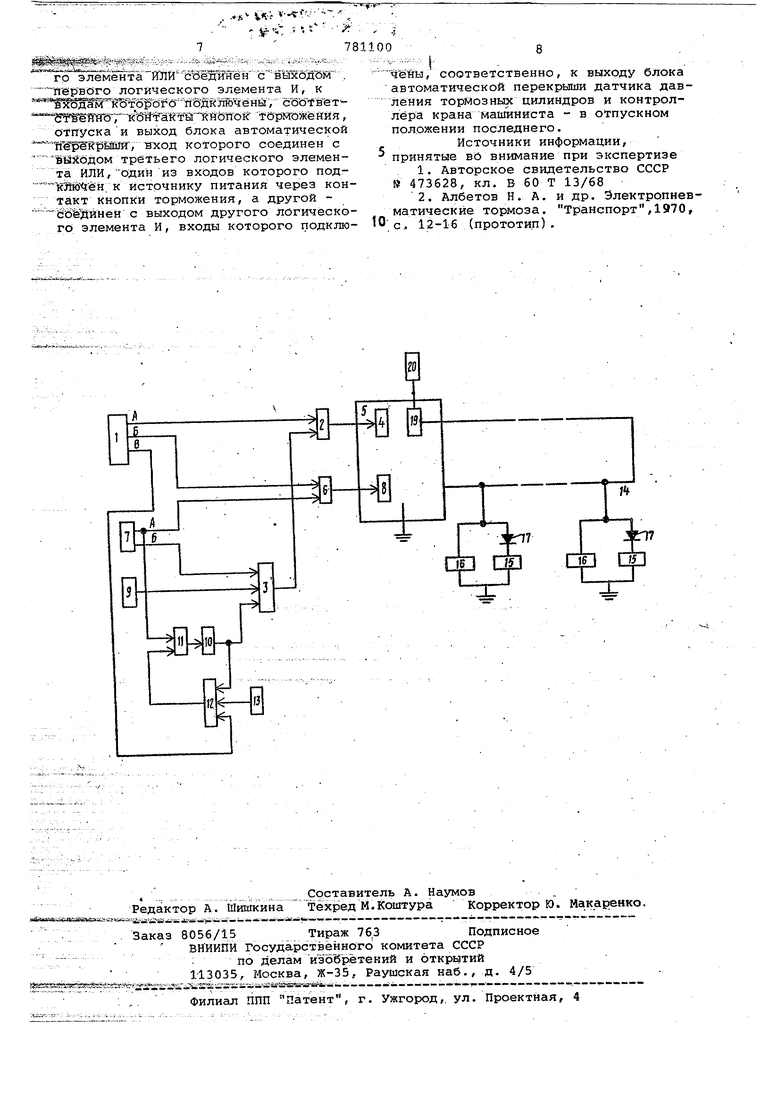
На чертеже представлена функциональная схема устройства для управления электропневматическим тормозом железнодорожного транспортного средства. . ,
Устройство содержит контроллер 1 крана машиниста, выход А которого соединен с одним из входов, первого логического элемента ИЛИ 2, второй вход которого соединен с выходом первого логического элемениа И 3. Выход логического элемента ИЛИ 2 соединен с реле 4 перекрыши блока 5 цепи управления. Выход Б контролера 1 крана машиниста соединен с одним из входов логического элемента ИЛИ 6, второй вход которого соединен с выходом А кнопки 7 торможения. Выход логического элемента ИЛИ б соединен с реле 8 торможения блока 5 цепи управления. Один вход первого логического элемента И 3 соединен с выходом Б кнопки 7 торможения, второй вход логического элемента И 3 соединен с ис точнйком через контакт кнопки отпуска 9, а третий вход лошического элемента 3 соединен с выходом блока 10 автоматической перекрнши. Вход блока 1б автоматической перекрыши соединен
с выходом третьего логического эле Мёйта ,ИЛИ 11, один вход которого соединен с выходом А кнопки торможения 7, другой вход этого элемента 11 соединен с выходом другого логического элемента И 12, один вход которого соединен р выходом блока 10 автоматической пёрекрьлши, второй вход элемента 12 соединен с выходом датчика 13 давления тормозных цилиндров и третий вход логического элемента И 12 сбёдинён с выходом В контроллера 1 кранамашиниста. Блок 5 цепи управления соединен с рабочим проводом 14, к которому подключены электромагнит-,
4
ные вентили 15 торможения и перекрыши 16, причем электромагнитные вентили 15 торможения подключены через диоды 17. Через .хвостовой вагон рабочий провод 14 соединяется с контрольным проводом 18, соединенным 5 с контрольным реле 19 блока 5 цепи . управления. Контрольное реле 19 блока 5 цепи управления связано с сигнальным блоком 20.
Устройство работает следующим образом.
При алектропневматическом тормоЛении с помощью крана машиниста на выходе Б контроллера 1 крана машиниста
с появляется сигнал поступающий на первый вход логического элемента ИЛИ б. В результате появляется сигнал на входа реле 8 торможения блока 5 цепи управления. При включении реле 8 торможения на рабочий провод 14 подается
напряжение прямой полярности и возбуйздаются электромагнитные вентили 15 торможения и первкрыши 16 электровоздухораспределителей. Рабочий провод 14 соединен в хвостовом вагоне
с контрольным проводом 18, подключенным к контрольному реле 19 блока 5 цепи управления. Контрольное реле 19, с помощью которого осуществляется контроль целостности цепей электропневматического тормоза, соединено с сигнальным блоком 20. При постановке крана машиниста в положение перёкрыши, сигиа л появляется на выходе А контроллера 1 крана машивиста и поступает на первый вход логического элемента ИЛИ 2,и с выхода последнего - на вход, реле 4 перекрыши блока 5 цепи управления. При включении реле 4 перакрыши меняется полярность напряжения на рабочем
проводе 14, обесточиваются электромагнитные вентили торможения, 15 и остаются возбужденными электромагнитные вентили 16 электрО1зоздухораспределителай. При нахождении крана
машиниста в положении отпуска, сигнал на вьахоДах А и Б контролёра 1 крана машиниста отсутствует, и появляется сигнал на выходе В, поступающий на один из входов логического
элемента ТЛ 12, При отпущенной кнопке торможения 7 отсутствует сигнал на её выходе А, соединенном со входом логического элемента ИЛИ б и/с первым входом логического
элемента ИЛИ 11. Таким образом, отсутствует сигнал на обоих входах элемента ИЛИ 6,- а, следовательно, отсутствует сигнал и на его выходе, соединенном с реле 8 торможения; Н$ выходе В кнопки 7 торможения и на
выходе кнопки 9 отпуска при отпущенном положении их имеются сигналы, поступающие на первые два входа логического элемента И 3. На выходе датчика 13 давления тормозных цилиндров при давлении.меньшем 0,3-0,4 атм. сигнал отсутствует, а-, следовательн отсутствует сигнал на выходе логиче кого элемента И 12, соединенном со вторым входом логического элемента ИЛИ 11. Так как отсутствуют сигналы на обоих входах логического элемента ИЛИ 11,то отсутствует сигнал и на выходе этого элемента, соединенн с третьим входом логического элемей И 3 соединенном со вторым входом ло гического элемента ИЛИ 2. Цак как о сутствует сигнал на обоих входах эле мента ИЛИ 2, то отсутствует сигнал и на его выходе, соединенным с реле 4 перекрыши. Таким образом, в отпуск ном положении крана машиниста и отпу щенных кнопках 7 торможения и отпуск 9, если перед этим не производилось торможение с помощью кнопки 7 тормо:жения (о работе элемента после торможения кнопкбй, см. ниже) реле 8 то можения и перекрыши 4 блока 5 цепи управления не получают питания и осу ществляется контроль целостности рабочего провода 14. через контрольный провод 18 от источника переменного тока (не показанного на схеме). При нажатии кнопки 7 торможения осуществляется элёктропневматическое торможение при.нахождении крана машиниста в отпускном положении, с автоматическим переходом в режим перекрыщи после отпуска кнопки. При нажатии кнопки 7 торможения на ее выходе А появляется сигнал,поступающий на второй вход элемента ИЛИ брИ с ее выхода - на реле 8 торможения, что приводит к электропневматическому торможению, как это б.ыло показано выше, Одновременно сигнал с выхода А кнопки торможения поступает на пер вый вход элемента ИЛИ 11 и с ее выхода на вход блока автоматической перекрыши (выполненного, например в виде реле), что приводит к появлению сигнала на его выходе, соединенном с первым входом элемента И 12. При достижении давления в тормозном цилиндре большего 0,3-0,4 атм.Появляется сигнал на вьгходе датчщса 13, соединенном со вторым входом элемента И 12. На выходе В контроллера 1 крана машиниста, в отпускном положении последнего, постоянно имеется сигнал, поступающий на третий, вход элемента И 12. Так как на всех входах элемента И 12 имеются сигналы, то на его выходе появляется сигнал, поступающий на второй вход схемы ИЛИ 11. Это приводит к тому, что после отпуска кнопки торможения, блок 10 автоматической перекрыши продолжает получать питание до тех пор, пока .имеется сигнал на выходе датчика 13 .и контролер 1 крана машиниста находится в отпускном положении. После отпуска кнопки 7 торможения сигнал на ее выходе А исчезает, что приводит к отключению реле 8 торможения. В отпущенном положении Кнопок 7 торможения и отпуска 8 поступают сигналы на первые два входа элемента И 3, а так как с блока автоматической перекрыши поступает сигнал и на третий его вход, то на его выходе появляется , поступающий через элемент ИЛИ 2 на реле 4 перекрыши блока 5 цепи управления, что переводит электропневматический тормоз в режим перекрыши. При нажатии кнопки 9 отпуска исчезает сигнал на втором входе элемента И 3,й, следовательно, прекращается подача сигнала с выхода элемента И 3 через элемент ИЛИ 4 на реле 4 перекрыши и электропневматическйй тормоз переходит в режим отпуска Если за время нахождения кнопки отjпуска в отпускном положении давление в тормозном цилиндре не упадет ниже 0,3-0,4 атм., (т.е. при сохранении сигнала на выходе датчика 13) то после прекращения нажатия отпускной кнопки 9 вновь наступает режим автоматической перекрыши по описанKVSM выше цепям ., Таким образом, схема позволяет производить дистанционное управлеление электропневматическим тормозом с помощью кнопок торможения и отпуска необходимыми ступенями с автоматической перекрышей между ними, что облегчает условия работы машиниста. Формула изобретения Устройство для управления электропневматическим тормозом жейеэ-нодорожного транспортного средства-., содержащее электромагнитные вентили торможения и перекрыши, соединенные с рабочим проводом, контрольный провод, к которому подключены сигнальный блок, соединенный с контрольным реле, и блок цепи управления, снаб-. женный электрическими реле торможения и перекрыши, и контроллер машиниста, отличающееся тем, что, с целью повышения эффективности путем обеспечения дистанционного управления, оно снабжено кнопками отпуска, и торможения, блоком автоматической перейрыши, логическими элементами ИЛИ, И, и датчиком давления тормозных цилиндров, причем вход реле тормолГения подключен к выходу первого логического элемента ИЛИ, один из входов которого соединен с выходом контроллера крана машиниста - в тор мозном положении последнего, другой вход первого логического элемейта ИЛИ подк.лючен к источнику через кнрпку торможения, а вход реле перекрыш блока цепи управления соединен с выходом другого логического элемента ИЛИ, один из входов которого подклюен к выходу контроллера крана машиниста в положении перекрыши последнего, другой вход второго логическо in-V V-T V-: .. : - ;;
ГО элемента ЙЙЙ-Шёданен свШсбЙбй . пбр вОго логического элемента И, к § д Ш 6ро аПбДйШ«1ёнй, соШвет- й № актТа ГйЬ-1г10й егр1 Гб ёййя, отпускаи выход блока автоматической TiWpgRjjsasjia, вход которого соединен с третьего логического элемента ИЛИ, один из входов которого под к11Шён. к источнику питания через кон: такт кнопки торможения, а другой ёбёЙйнён с выходом другого логического элемента И, входы которого подклю781100
8
Сены, соответственно, к выходу блока автоматической перекрыши датчика давления торйозньос цилиндров и контроллера крана машиниста - в отпускном положении последнего.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 473628, кл. В 60 Т 13/68
2.Албетов Н. А. и др. Электропневматическйе тормоза. Транспорт,1970, с 12-16 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электропневматическим тормозом железнодорожного транспортного средства | 1978 |
|
SU779122A1 |
| Устройство для управления и контроля цепей электропневматического тормоза железнодорожного транспортного средства | 1982 |
|
SU1058813A1 |
| КРАН МАШИНИСТА ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2444454C1 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗОМ ПОДВИЖНОГО СОСТАВА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2614468C2 |
| БЛОК АДАПТИВНОГО УПРАВЛЕНИЯ ТОРМОЗОМ ТЕЛЕЖКИ | 2012 |
|
RU2524751C1 |
| КРАН ВСПОМОГАТЕЛЬНОГО ТОРМОЗА ЛОКОМОТИВА | 2021 |
|
RU2761584C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ТОРМОЗ МОТОРВАГОННОГО ПОДВИЖНОГО СОСТАВА | 2003 |
|
RU2243117C1 |
| Кран вспомогательного тормоза тягового подвижного состава | 2023 |
|
RU2811622C1 |
| ЭЛЕКТРИЧЕСКАЯ СХЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ КРАНОМ МАШИНИСТА С ИСТОЧНЙКО;л ПИТАНИЯ | 1973 |
|
SU382534A1 |
| КРАН МАШИНИСТА ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2631126C2 |
