(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РЕВЕРСИВНЫМ ЭЛЕКТРОД В ИЩ ТЕ Л ЕМ
. . : ,.„.. . : ,:. ... . ....
Изобрётение относится к электротехнике, а именно к управлению электрическими двигателями систем авт,оматики, и преимущественно может быть, использовано для управления высоко- 5 скоростным реверсивным бесконтактным двигателем постоянного тока.
Известна схема управления реверсом бесконтактного двигателя постоянного тока, содержащая когдалутатбр, си- lO ловой вход которого подключен к источнику напряжения, его выходы соединены с оалотками двигателя. Управляющие входы коммутатора подключены к двум группам датчиков положения тора, питание которых коммутируется в Зсшисимости от направления вращения 1 .
Недостатком этого устройства является наличие двух комплектов дат- 20 чиков положения ротора.
Наиболее близким по технической, сущности к предлагаемому является устройство для управления реверсивным электродвигателем, вал которого через 25 механическую передачу связан с исполнйтельным механизмом, а цепи питания двигателя с блоком управления, содержащее датчик скорости на валу двигателя, связанный через блок стабилиза-30
ции с блоком управления, блок измерзНИН числа оборотов, связанный с датчиком скорости .2 .
Недостаток устройства состоит в тем, что в режиме реверсивного вращения он накапливает ошибку в угловом положении вала механизма.
Цель изобретения - повышение точности отработки параметров, задаваемых програ1 «ой работы привода при прямсял и обратном вращении.
Поставленная цель достигается тем, что введены датчик начального положения вала механизма и триггер, причем входы триггера соединены с выходом блока измерения числа оборотов и с выходом д атчика начального положения вала, а выход с блоком стабилизации и с блоком управления.
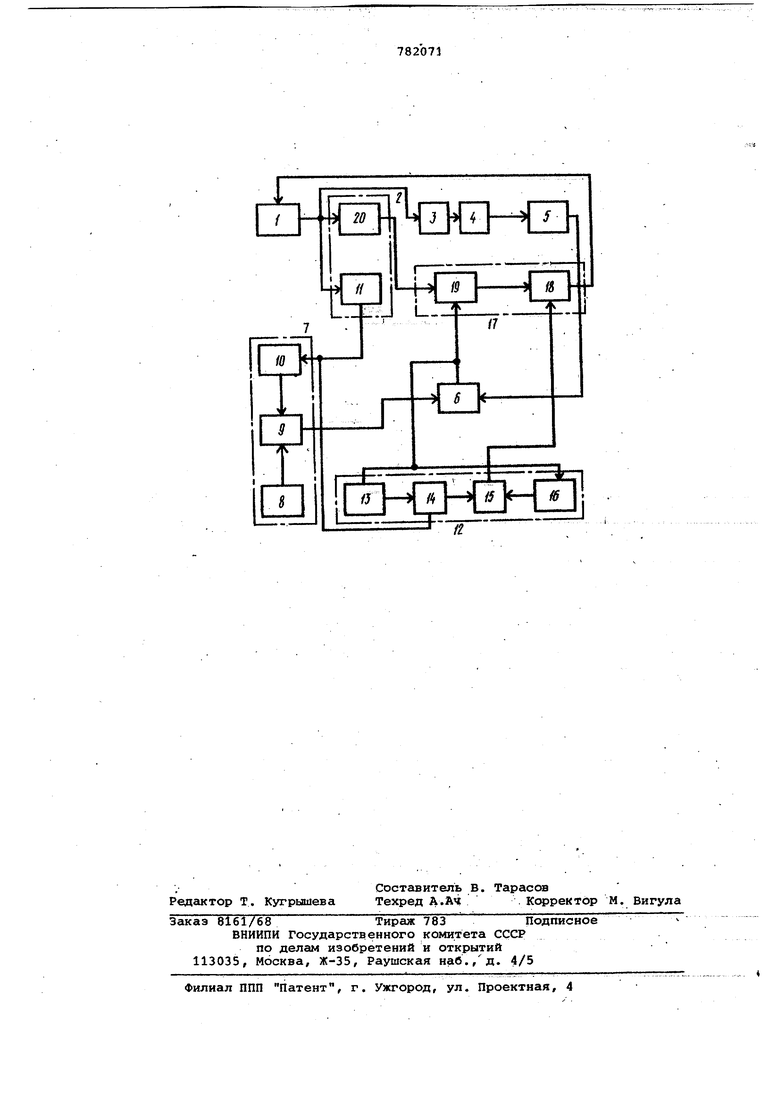
На чертеже представлена схема устройства на примере управления бесконтактным двигатЪл ем постоянного тока.
Электродвигатель 1, на валу которого укреплен блок 2 датчиков, связан через механическую передачу 3 с„исполнительным механизмом 4, на выходном вгшу которого расположен датчик5 начального положения, выход которого соединен .с первым установочным входом триггера б, второй установочный вход которого соединен с блоком 7 иэмере Шя ШШ1а дбЬр6 бв7 йШ еШШЙгиэ задатчика 8 кодов, схемы кодов и реверсивногосчетчика 10, вх которого подключен к выходу датчика. 11 скорости, который подсоединен так же к первому входу блока 12 стабилиз ции , содержащего генератор 13 опорно частоты, частотный дискриминатор 14, йыход которого подключен к первому входу схемы ИЛИ 15, второй вход кото рого объединен с выходом элемента 16 . задержки. Выход блока стабилизации соединен с первым входом блока 17 уп тШШ Гётком мутатора 18, соединенного с логичес КИМ устройством 19, Второй вход блока 17. подключен к датчику 20 гтоложё- -. -: Щя ротора, а третий - к триг гёра 6, объединен нЬгЬ ё8 торШГ вх6дом блока 12 стабилизации / В Ткачестве дёйга ёля М(5Же1 исполь зоваться линейный двигатель, при этсзм да йй--ЙМаЖмбго поЛожёШ1я Мёхани3 Kia одновременно является датчиком положения вала двигателя. ,„ УетрЬйствб р1аб6таёт , слёдуЩим образом .При включении питания триггер 6 ° 1а№авлйвае ся в состояние , которым определяется вращение двигателя в обратном направлений. Дйи(Гатёйь вращается в рбратнсм направлении до срабатывания да тчика нМШй&ного по ложеняя. с датчика начального гтше ёгнйя переключает триггер в сос ТбйШё (ЭПреДе 1ГШЩее вращёние - дв ига теля в прямсм направлений. При этом сЙЬнал с триггера запускает элемент 16 задержкии устанавливает г:Тётчик числа оборотов в нулевое состояние, а сигнал с логического элемен та ИЛИ 15 Зс1пирает силовой коммутатор ТВ, при происходит фиксация положе ни й отора на время сраб ФЙШШгя эле ; иента задержки, после которого отпирает ся коммутатор и на обмотку-т -фа ной синхронной машины 1 подается питание. Двигатель приходит во вращение в прямом направлении. Порядок пе реключения фаз обмотки определяется сигналом с датчика 20п 5ЛдШййя рото ра и осуществляется логическим устройством 19, которое управляется сиг jialidM трйггера. . ™С начШ1бМЪращШшя даигат входы счетчика 7 числа оборотов и частотного дискриминатора 14 & вУхода импульсного датчика 11 скорости йОдайтся импульсы, частота которых 11 рбг1орцйС)нальна скорости вращения, а 1 6личествЬ - чйслу Ьборо Ш ; По йерерайгона двигателя частота С импульснрго .датчйка скорости повышается. Электродвигатель разгоняется по своей естественной характеристике. При совпадении часто ffei импульсов с 1аатчий:а Йкор 6 :ти и регулируемого генератора 13 на выход
782071 частотного дискриминатора появляются 1ЫпуЙьсы, которые через логическое устройство ИЛИ подаются на дополния-ельный управляющий вход коммутирую-щего устройства. Вргидение двигателя в прямом направлении происходит до момента, когда код, выработанный счетчиком числа оборотов, совпадает с кондом, установленным на выходе задатчика 8 кодов, при этом на выходе схемы 9 сравнения кодов появляется импульс, который переключает триггер в состояние, определяющее вращение двигателя в обратиew направлении, а сигнал с триггера запускает элемент задержки и снова фиксируется ротор двигателя. После срабатавания элемента задержки двигатель начинает вращение в обрат- ном направлении. При обратном вращении c ttfeCnOfH с триггера изменяется порядок Чередования сигналов с датчика положения ротора, поступающих на кс лмутирующее устройство, запирается счетчик числа оборотов. Вращение в обратном направлении происходит до срабатывания датчика начального положения, после этого весь цик.л повторяется. Применение такого устройства управления реверсивным двигателем позволяет получить регулируемле в широкем диапазоне скоростей вращения и чисел оборотов прямого и обратного хода двигателя, а также времени фиксированного положения ротора в моменты реверса. Формула изобретения УстройсТвО для управления ревер6йёнЁ15Г Э1:е1 :тродвигателем, вал которого через механическую передачу связан с йспоШйТельныМ механизмом, а Цепи питания двигателя с блоком управлений, содержащее датчик скорости на в сШу Двигателя, связанный через блок стабилизации с блоком управления, блок измерения числа оборотов, связанный с датчиком скорости, О т л и ч а ее с я т&л, что, с повышения точности отработййпараметров, задаваемых прогр|амм6й работы привода при прямом и обратном вращении, введены датчик начального положения вала механизма и f lifrep, причем входы триггера соединены с выходом блока измерения числа оборотов и; С вызсъдомдатчика .начального положения вала, а : выход - сблоком стабилизации и с блок см управлений. . Источ.никй информации, принятые в О внимание При экспертизе li Патент США 3891906,кл.318-257, 1979. -Г , : 2. Тропский с. Г. Исследование возможности использования обычных серийных электрических .йащин для решений ЭаДачДискретного привода с Ш.Д. 1971. с. 155.
I
rri-- fFU
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления положением вала электродвигателя | 1977 |
|
SU708310A1 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1983 |
|
SU1100700A1 |
| Стабилизированный бесконтактный двигатель с комбинированным управлением | 1987 |
|
SU1522355A1 |
| Устройство для регулирования скорости электропривода | 1988 |
|
SU1539725A1 |
| Устройство для установки и стабилизации фазового положения блока вращающихся головок | 1986 |
|
SU1515195A1 |
| Устройство для программного управления положением вала электродвигателя | 1980 |
|
SU907512A1 |
| Дискретный электропривод со стабилизацией скорости | 1983 |
|
SU1108601A1 |
| Устройство измерения скорости вращения бесконтактного двигателя постоянного тока | 1977 |
|
SU662867A1 |
| Бесконтактный тахогенератор | 1981 |
|
SU949504A1 |
| Устройство для стабилизации скорости и фазы вращения ротора электродвигателя постоянного тока | 1979 |
|
SU921012A1 |