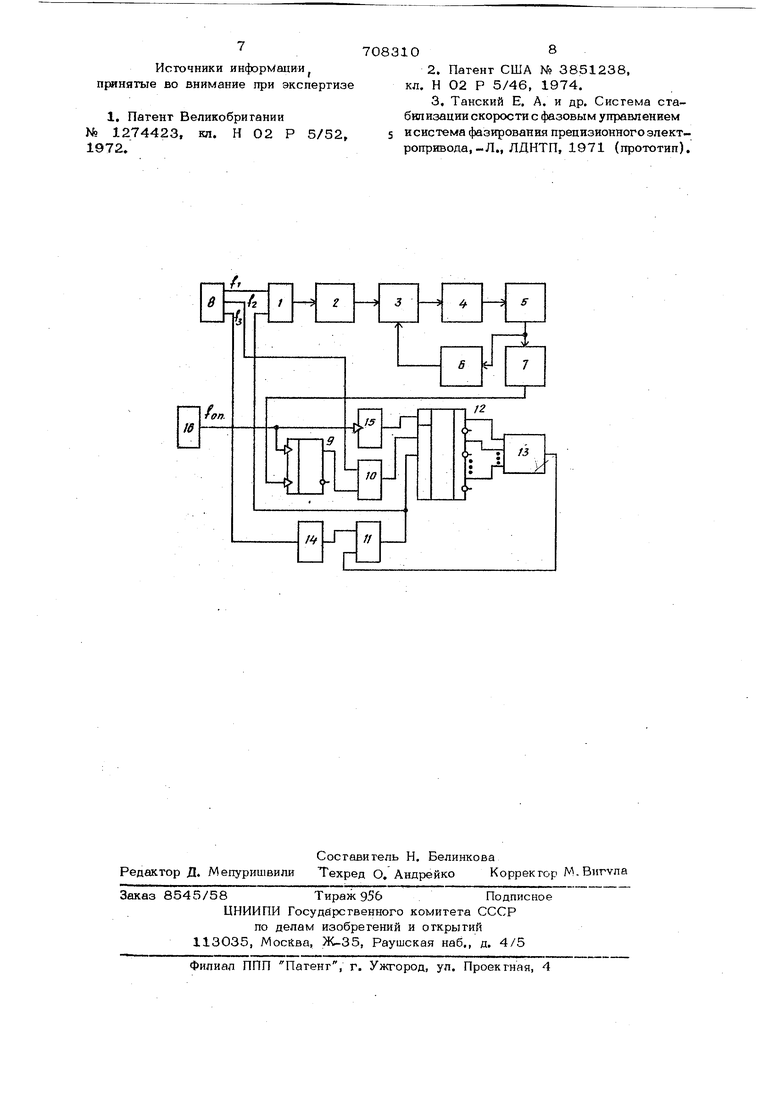
Изобретение относится к области автоматического регупирования, а именно к системам стабилизации скорости электродвигателей с дополнительным регулированием фазового положения вала и может найти различное применение в автоматике, в частности в устройствах, в которых необходимо обеспечить синхронное и синфазное вращение валов нескольких электродвигателей. Известны системы регулирования фазового положения вала электродвигателя 11Г2 . Первая из известных систем содержит генератор эталонной частоты, выход которого через элементы постоянной задержки подключен к нескольким контурам стабилизации скорости элeктfюдвигaтeлeй переменного тока. На валу этих электродвигателей имеется датчик скорости, который выдает один импульс в блок сравнения за один оборот вала. По этой причине стабильность мгновенной скорое-и, а значит и фазового положения вала, н -высока. Же лаемый фазовый сдвиг между двигателями получают с помощью элементов постоянной задержки, а не автоматически, что также является недостатком системы. Вторая из известных систем содержит аналоговый контур стабилизации скорюсги, фазовый детектор, который генерирует аналоговый сигнал, пропорциональный разности фазовых положений валов двух электродвигателей. Этот сигнал подается на создающее напряжение устройство для изменения корректирующего сигнала, поступающего в контур по скорости, с целью более точной синхронизации вращения валов. В связи с использованием аналогового контура стабилизации скорости точность фазирования такой системы также низкая. Наиболее близким по технической сущности к данному изобретению является устройство для программного управления положением вала электродвигателя, обладающее высокой стабильностью мгновенной скорости и точностью фазирования и содержащее последовательно соединенные фазовый дискриминатор, блок управления и электродвигатель, на валу которого установлены датчик скорости и датчик положения, выход датчика скорости соедине с одним из входов фазового дискриминато ра, другой вход которого через делитель частоты подключен к выходу элемента ИЛИ, выход датчика положения соединен с первым входом триггера, второй вход которого подключён к выходу генератора опорной частоты, а первый вход элемента ИЛИ подклю 1ен к одному из выходов генератора эталонных частот з1 . Недостатком данного устройства является невозможность фазирования положени вала электродвигателя при низких скоростях или при низ1сой частоте опорных импульсов. Цель изобретения - расширение области применения устройства, путем обес печения возможности фазирования положения вала электродвигателя относительно низкочастотных опорных импульсов в широком диапазоне скоростей. Поставленная цель достигается тем, что в устройство введены реверсивный счетчшс, два элемента И, элемент задерж ки, формирователь импульсов и формирователь управляющего сигнала, выход первогчэ элемента И подключен к суммирующему входу реверсивного счетчика, выход второго элемента И - к его вычитающем входу и ко второму входу элемента ИЛИ, первый вход первого элемента И непосредственно, а первый вход второго элемента И через элемент задержки подключены к соответствующим выходам генера тора эталонных частот, вторые входы пер вого и BTOpoi-o элементов И соединены соответственно с выходом триггера и вы ходом формирователя управляющего сигна ла, входы которого подключены к выхода реверсивного счетчика, а вход и выход формирователя импульсов подключены соответственно к выходу генератора опорной частоты и к обнуляющему входу сивного счётчика. На чертеже изображена схема устройства, содержащая элемент ИЛИ 1, делитель частоты 2, фазовый дискриминатор 3 блок управления 4, электродвигатель 5 (например, постоянного тока), датчик скорости 6, датчик положения 7, генератор эталонных частот 8, триггер 9, первый 1О и второй 11. И, реверсивиый счетчик 12, формирователь управляющего сигнала 13, элемент задержки 14, формирователь импульсов 15 и генератор опорной частоты 16. Устройство работает следующим образом. Генератор 8 подает три стабильные синхронизированные последовательности коротких импульсов ( , f 2 vi)Пусть на первый вход дискриминатора 3 поступают импульсы частоты -|р- , где п - коэффициент деления делителя 2. На другой вход дискриминатора 3 поступают импульсы с датчика 6,который должен генерировать достаточно большое число импульсов за один оборот вала. Если частота импульсов на первом входе дискриминатора 3 больше, чем на втором, то напряженке на его выходе максимальное и скорость вращения вала электродвигателя 5 увеличивается. Если меньше частоты частота импульсов - импульсов датчика 6, то. напряжение на выходе дискриминатора 3 равно нулю и скорость вращения вала уменьшается. В установившемся режиме вал электродвигателя 5 вращается с такой скоростью, что частота импульсов с датчика 6 равна частоте - . При этом аналоговое напряжение на выходе дискриминатора 3 зависит от сдвига по фазе между сигналами, подаваемыми на его входы. Это напряжение через блок 4 так управляет электродвигателем 5, что фаза сигнала с датчика скорости следит за фазой сигнала на входе дискриминатора 3. Такая работа соответствует вхождению вала электродвигателя 5 в синхронный режим, однако фазовое положение вала относительно фазы частоты опорных импульсов оп. может быть произвольным. Для изменения фазового положения вала в устройстве ис- . пользуется метод дискретного изменения фазы, заключающийся в добавлении импульсов в последовательность импульсов частоты $4 .В результате чего фаза импульсов частоты на входе дискриминатора 3 изменяется в одном направлении дискретно на . градусов. Дискретность изменения фазы и частота добавления fj (фазирования) выбираются такими, чтобы устройство не выходило из синхронизации по скорости и определяются экспериментально. Частота добавления определяет время фазирования и зависит, в основном, от быстродействия электродаигателя. Датчик 7 выдает оп.ин импульс за один оборют вола. Имгтульсы с этого датчика поступают на один из входов триггера 9, иа другой вход которого поступают импульсы с генератора 16. По переднему фронту импульса опорной частоты триггер 9 устанавливается в единичное состояние, а формирователь 15 формирует короткий импульс, усганавпивающий реверсивный счетчик 12 вНулевое состояние. При этом элемент И 10 откры вается и импульсы частоты заполнения fj поступают на суммирующий вход счет чика 12. Частота заполнения Jf.j выбирается такой, чтобы при максимальном фазовом рассогласовании в счетчике могло быть записано число М-П , где N - число импульсов с датчика 6 за один оборот вала. Одновременно с суммированием импульсов частоты f j, происходит считывание информации со счетчика 12 импульсами частоты f J, , поступающим на его вычитающий вход через открытый элемент И 11. Эти же импульсы поступают на вторюй вход элемента 1, изменяя фазовое положение вала электродвигателя 5. Чере время, равное фазовому рассогласованию, на другой вход триггера 9 поступает импульс с датчика 7 и по его переднему фронту триггер 9 устанавливается в нулевое состояние. В результате элемент И 10 закрывается и импульсы частоты i. на суммирующий вход счетчика 12 не поступают, а считывание информации по его вычитающему входу продолжается. При каждом появлении опорного импульса происходит уточнение записанной информации в счетчике 12 о фазовом рассогласовании. Добавление импульсов, а значит и и зменение фазового положения вала, происходит до тех пор, пока число в счетчике 12 не станет меньше П , после чего на выходе формирователя 13 устанавливается низкий уровень напряжения При этом элемент И 11 закрывается, зап рещ.ая прохождение импульсов частоты f J, на добавление, и фазирование положения вала, относительно опорных импуль сов заканчивается. Элемент задержки 1.4 необходим для того, чтобы импульсные последовательности частот f и i на выходе счетчика 12 и частот 5 и -на выходах элемента 1 не перекрывались во времени. Требуемую скорость вращения вала электродвигателя устанавливают пропорциональным изменением фиксированных частот {, и f. генератора 8. В отличие от существующих сясгетл такого типа данное устройство позволяет с высокой точностью фазировать положение вала электродвигателя относительно опорных импульсов как в более широком диапазоне частот последних, так и в более широком диапазоне скоростей, то есть обладает большими функциональными возмоисностями. Использование общего генератора в нескольких таких системах позволит достичь синхронного и синфазного вращения электродвигателей между собой. Такая система меньше по габаритам и легко перестраивается. Формула изобретения Устройство для программного управления положением вала электродвигателя, содержащее последовательно соединенные фазовый дискриминатор, блок управлеш я и электродвигатель, на валу которого установлены датчик скорости и датчик положения, выход датчика скорости соединен с одним из входов фазового дискриминатора, другой вход которого через делитель частоты под1 лючен к выходу элемента ИЛИ, выход датчика положения соединен с первым входом триггера, второй вход которого подключен к выходу генератора опорной частоты, а первый вход элемента ИЛИ подключен к нз выходов генератора эталонных частот, отличающееся тем, что, с целью расширения области применения устройства, в него введены реверсивный счетчик, два элемента И, элемент задержки, формирователь импульсов и формирователь управляющего сигнала, выход первого элемента И подключен к суммирующему входу реверсивного счетчика, выход второго элемента И - к его .вычитающему входу и ко второму входу элемента ИЛИ, первый вход первого элемента И непосредственно, а первый вход второго элемента И через элемент задержки подключены к соответствующим выходам генератора эталонных частот, вторые входы первого и второго элементов И соединены соответственно с выходом триггера и выходом формирователя управляющего сигнала, входы которого подключены к выходам реверсивного счетчика, а вход и выход формирователя импульсов подключены соответственно к выходу генератора опорной частоты и к обнуляющему входу реверсивного счетчика. Источники информации принятые во внимание при экспертизе 1, Патент Великобритании № 1274423, кп. Н 02 Р 5/52, 1972. 7083 5 108 2. Патент США № 3851238, кл. Н 02 Р 5/46, 1974. 3, Танский Е. А. и др. Система стабилизации скорости с фазовым управлением и система фазирования прецизионного электропривода,-Л., ЛДНТП, 1971 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления положением вала электродвигателя | 1980 |
|
SU907512A1 |
| Устройство синхронизации в одночастотных многоканальных адресных системах с временным разделением каналов | 1989 |
|
SU1811018A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2485665C1 |
| Устройство для фазирования носителя магнитной записи | 1986 |
|
SU1348903A1 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1983 |
|
SU1100700A1 |
| УСТРОЙСТВО ФАЗИРОВАНИЯ ШКАЛЫ ВРЕМЕНИ ЭЛЕКТРОННЫХ ЧАСОВ | 1994 |
|
RU2084944C1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2422978C1 |
| Устройство для импульсного регулиро-ВАНия фАзОВОгО пОлОжЕНия POTOPA СиН-ХРОННОгО элЕКТРОдВигАТЕля | 1979 |
|
SU817960A1 |
| Устройство тактовой синхронизации | 1980 |
|
SU906016A1 |
| Устройство для перемещения магнитной ленты | 1985 |
|
SU1327170A1 |
