Известен ручной затирочный инструмент, удерживаемый рукоятью, состоящий из затирочной плоскости, приводимой в качательно-возврат.но-поступательпое движение от гибкого вала.
Особенностью описываемого затирочного инструмента является констрзкция механизма привода затирочной плоскости, состоящего из укрепленной на руйояти щестеренной передачи, выходной вал которой оканчивается кривошипным пальцем, соединенным поворотно с затирочной плоскостью, подвижно сочленепиой в противоположном конце с рукоятью при помощи щтифта, входящего в прорезь на лапе рукояти.
Назначение ручного затирочного инструмента - механизировать процесс затирки при штукатурных работах.
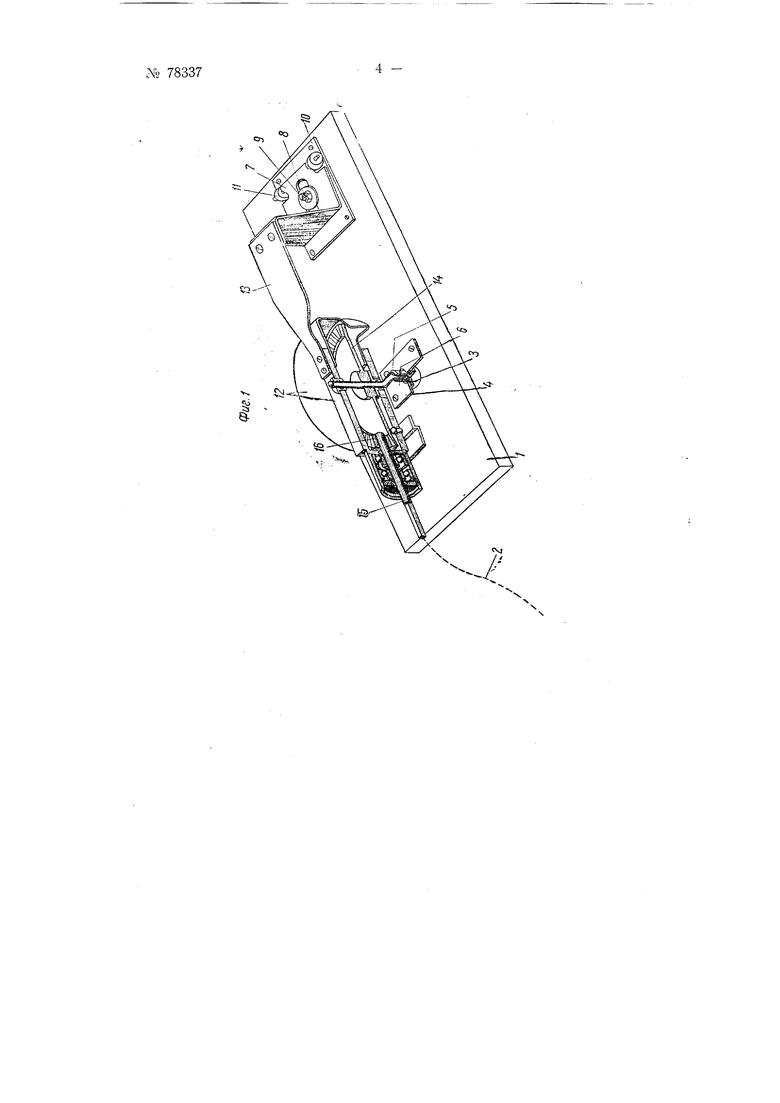
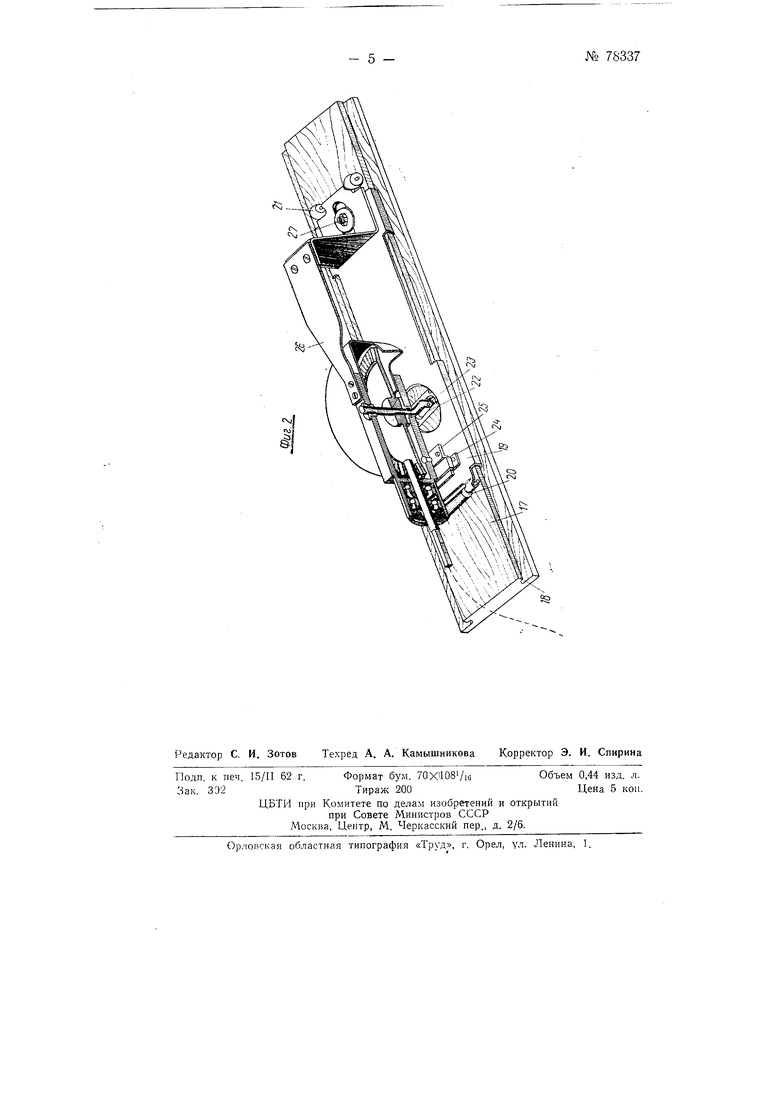
На фиг. 1 изображена схема ручного затирочкого инструмента, соверщающего качательно-возвратно-поступательное движение; на фиг. 2-схема такого же инструмента, соверщающего возвратно-поступательное движение без качания.
Затирочный инструмент, совершающий качательно-возвратно-поступательные движения (фиг. 1), состоит из следующих основных частей: затирочной плоскости /, редуктора с механическим приводом от гибкого вала 2, и отдельно стоящего электродвигателя.
Затирочиая плоскость /, имеющая ступицу 3, удерживаемую накладкой 4, приводится в движение коленчатым поводко.м 5. Конец поводка скрепляется со ступицей при помощи щпильки 6.
Другой конец затирочной плоскости оп.ирается па лапу 7, в продольный вырез которой заведен штифт 8, удерживаемый в прорези посредством законтренной шайбы 9.
Штифт 8 прикреплен к накладке JO, которая, в свою очередь, привернута к затирочной плоскости.
Для устранения трения скольжения между накладкой 10 и подошвой лапы 7 в последней имеются два опорных ролика П, которые, ка№ 78337- 2 -
таясь по накладке, удерживают подошву лапы на определенном расстоянии от накладки.
Лапа 7 жестко соединяется с корпусом редуктора 12 посредством планки 13, выполняющей одновременно роль рукоятки для рабочего, удерживающего весь механизм при работе его на затираемой поверхности штукатурки.
В данном случае принят редуктор щестеренчатого типа, состоящий из шестеренчатой пары. Осью большой конической щестерни 14 является коленчатый поводок 5. На ось 15 малой ведущей конической щестерни 16 надевается оголовок гибкого вала 2, получающего вращение от небольшого двигателя -переносного типа, который ставится на пол и по мере перехода рабочего с захватки на захватку обрабатываемой поверхности перемещается им же в направлении своего движения. Длина гибкого вала может быть назначена различной.
При принятой схеме работы затирающей плоскости движение ее осуществляется по схеме плоско-параллельного движения, частично усложненного качающимся возвратно-поступательным движением ,п,равого ее конда, которое обусловливается направляющей прорезью лапы Z. ;
1 В результате этого затирающей плоскостью совершаются движения вокруг многочисленных, сменяющих один другого мгновенных центров вращения, что фактически ликвидирует на больших скоростях разбрызгивание затирающей плоскостью накрьшочного слоя щтукатурки, а также обеспечивает равномерный режим истирания рабочей поверхности самой затирочной плоскости. Одиовременно принятая кинематическая схема движения затирочной плоскости обеспечивает устойчивое динамическое равновесие всего аппарата относительно удерживающего его рабочего.
В качестве привода взят гибкий вал 8-ГО мм .при числе оборотов 1500-2б60 в минуту и передаваем ой мощности 0,20-0,30 квт. Число оборотов поводка .аатирочной -ллоскости в средием 250-300 в минуту. МаКсима.дъный габарит редуктора /ПО мм. Плечо поводка ориентировочно принято 1,5 -см.. Вес затйрки-без гибкого вала 1-000-1100 г. Двигатель переносного типа мощностью 0,2-0,3 квт. Площадь затирочиой плос кости :пр;дби;рается конструктивно,
Й -за- ир очном -инструменте, сове-рща-ющем .возератно-поступате пьяое .д&йж-ён-ие без «ачаиля (фиг. ,2), затирочаая р€йка 17, имеюща г продольные пазы 18, вставляется в направляющую пла-нку 19, удерживаясь :.боковым,и отгибами этой планки. Для устранения значительного .(рения м«жду рейкой и -нап.равл-яющей планкой с Обоих концов ,пла«ки .установлены ролики 20 и 2.1. Эти :ролики удерживают ,рейк-у -на расс;т Оянии 2-3 мм от поверхности направл.яющей лланки. В .средней части .рейки, -вм.онтирован металлический вкладыш 22 с продолговатым вырезом, .который расположен поперек.движения рейки. Ось .редукт.ора имеет изогн.утый конец-поводок 23, который через .круглое отверстие в направляющей планке -свободно заводится в вырез вкладыща 22 затирочной .рейки.
Цри работе редуктора поводок 23, цраизводя вращательное движение, водит за собой затирочную :рейку, которая совершает постугштельно-возвратное движение, -как -было указано выше.
Редуктор, (СОСТОЯЩИЙ из шестеренчатой лары, крепится с направляющей планкой 19 через посредство замка, состоящего из соединитель-ной скобы-2 и .крючка-задвижки 25, приклепанного к нижней .крышке редуктора. После того как произведено соединение замка, закрепляют -другой-конец I редуктор а удерживаемой рукоятью 26, соединенной с лапой, в вырез которой пропущен щтифт 27 .нацравляющей планки 19.
В качестве привода применен гибкий вал. Двигатель установлеп на полу или на подмостях и передвигается рабочим по мере перехода его с захватки на захватк}.
Предмет изобретения
1.Ручной затирочный инструмент, качательно-возвратно-поступательно движущийся с приводом от гибкого вала, затирочная плоскость которого снабжена рукоятью для держания инструмента во время работы, отличающийся тем, что привод, выполненный в виде шестеренной нары, укреплен на рукояти неподвижно и соединен с затирочной плоскостью кривошипным пальцем своего выходного вала, а затирочная плоскость подвижно прикреплена к рукояти при помощи штифта, входящего в продолговатую прорезь на лапе рукояти, с целью приведения затирочной плоскости в качательно-возвратно-поступательное движение во время зажатия рукояти в руке оператора.
2.Ручной затирочный инструмент по п. 1, отличающийся тем, что шестеренная пара и рукоять установлены на пластине с лапками для держания затирочной плоскости с возможностью ее продольного .возвратно-поступательного перемещения, а кривошипный налец выходного вала шестеренной пары введен в поперечную продолговату о щель в затирочной плоскости для передачи ей л,вижения.
. - ,3 -№ 78337
ОSi