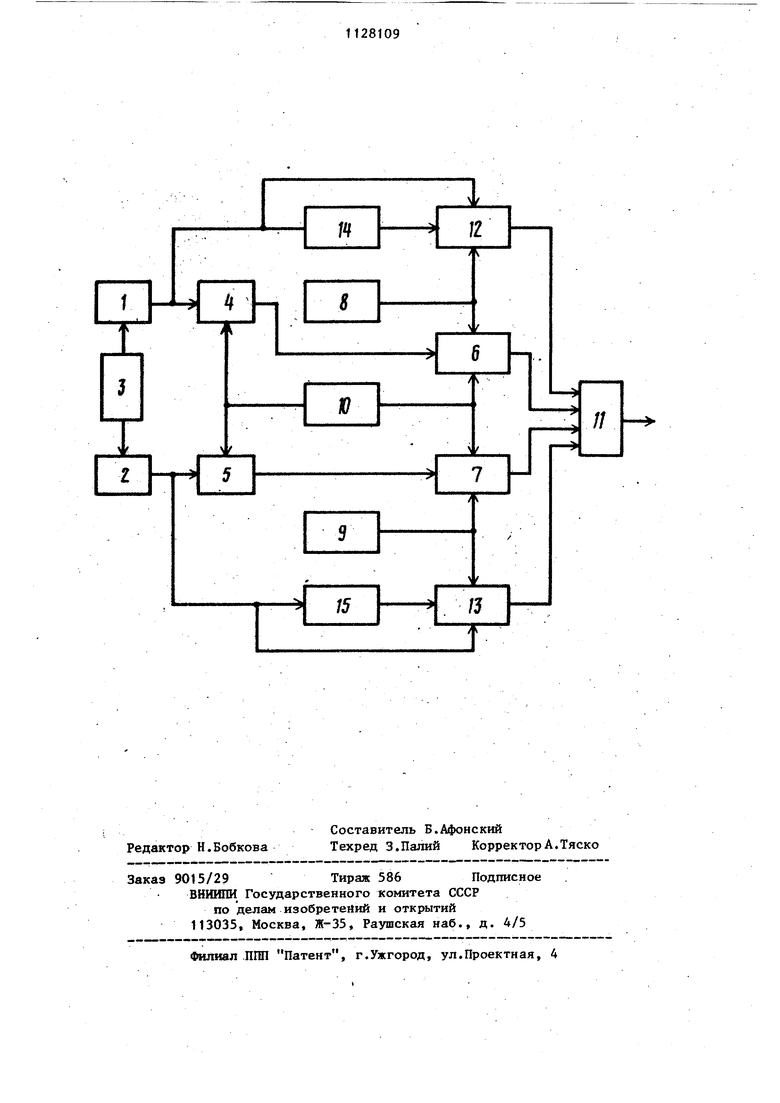
Изобретение относится к машиностроению, а именно к средствам для контроля зубчатых колес. Известно устройство контроля кинематической погрешности, содержаще импульсные датчики углов поворота начального и конечного звеньев контролируемой передачи, преобразователе частоты следования импуишсов, осуществляющие выравнивание частот еледования импульсов в противоположных каналах, фазометр, измеряю1ций текутцу разность фаз рТ« Недостатком этого устройства является необходимость применения пре образователей частоты при контроле механизмов с передаточным числом, отличным от единицы, что вносит пог решность в результаты Контроля. Наиболее близким к.изобретению по технической сущности является ус ройство для контроля кинематической погрешности зубчатых передач, содержащее импульсные датчики углов поворота начального и конечного .звеньев контролируемой передачи, к каждому из которых первыми входами подключены ключи, первый и второй накапливаю щие сз мматоры, соединенные первыми входами с выходом ключей, два кодирующих пер;еключателя, подключенные к вторым входам первого и второго накапливающих сумматоров, блок управ ления, один выход которого соединен с третьими входами первого и второго накапливающих сумматоров, а второй вь1ход - с вторыми входами ключей, и блок алгебраического сложения, вхо ды которого соединены с выходами первого и второго накапливающих сумматоров И.. . Однако в известном устройстве, при использовании реально имеющих датчиков, ввдающих 2500-§0000 импуль сов на оборот, сигнал на его выхйде требует дополнительной обработки для получения точности, которая обес печивается первичными преобразователями. Цель изобретения-повьш1еиие произ врдительности контроля. Указанная цель достигается тем, что. устройство для контроля кинема тической погрешности зубчатых передач, содержащее импульсные датчики углов поворота начального и Конечног звеньев контролируемой передачи, к каждому из которых первыми входами 092 подключены ключи, первый и второй накапливающие сумматоры, соединенные первыми входами с вькодом ключей, два кодирующих переключателя, подключенные к вторым входам первого и второго накапливающих сумматоров, блок управления, один выход которого соединен с третьими входами первого и второго накапливающих сумматоров, а второй выход - с вторыми входами ключей, и блок алгебраического сложения, входы, которого соединены с выходами первого и второго накапливающих сум маторов, снабжено третьим и четвертьм накапливающими сумматоргти, первые входы которых через умножители частоты соединены соответственно с датчиками .начального и конечного звеньев, вторые входы - соответственно с первым и вторьм кодирующими переключателями, третьи входы третьего и четвертого накапливающих сумматоров - соответственно с датчиками начального и конечного звеньев, выходы третьего и четвертого накапливающих сумматоров подключены к входам блока алгебраического сложения. На чертеже изображена структурная схема устройства для контрчэля кинематической погрешности зубчатых передач. Устройство для контроля кинематической погрепшости зубчатых передач содержит импульсные датчики 1 и 2 угла поворота начального и конечного звеньев-контролируемрй передачи 3, к каждому из которых первыми входами подключены ключи 4 и 5, первый и второй накапливакяцие сумматоры б и 7, соединенные первыми входами с выходами ключей 4 и 5, два кодирующих переключателя 8 и 9, подключенные к вторым входам первого и второгонакапливающих сумматоров 6 и 7, блок 10 управления, один выход которого соеД1шен с третьими входами первого и второго накапливающих сумматоров 6 и 7, а второй выход - с вторыми входами ключей 4 и 5, блок 11 алгебраичесг кого сложения, входы которого соединены с выходами первого и второго накапливающих сзгмматоров 6 и 7, третий и четвертый накапливающие сумматоры 12 и 13, первые входы KOTOIH IX через умножители 14 и 15 частоты соединены соответственно с датчиками 1 и 2 начального и конечного звеньев, вторые входы - соответственно
с первьм и вторым кодирующюда переключателями 8 и 9, третьи входы третьего и четвертого накапливаюпщх сумматоров 12 II 13 - соответственио с датчиками 1 и 2 начального и конеч кого звеньев, выходы третьего и четвертого накапливающих сумматоров 12 и 13 подключены к входам блока 11 алгебраического сложения.
Устройство работает следующим образом.
Предварительна в кодирующие переключатели 8 и 9 вводят данные о контролируемой передаче. Для этого в кодирующий переключатель 9 вводят вели чину углового, расстояния мезвду импульсами датчика 2 угла поворота конечного звена, а в кодирующий переключатель 8 - датчика 1 угла поворота начального звена, измененную в соответствии с передаточным отношением контролируемой передачи. Можно )зводить при необходимости данные о передаче и в других единицах. Затем по нажатию кнопки Пуск (не показана) блок 10 управления вырабатывает сигнал, устанавлив;ающий накапливающие .сумматоры 6 и 7 в нулевое состояние, и открывает ключи 4 и 5, про|1тускающие короткие импульсы с датчи:КОВ.
При поступлении каждого импульса с ключа 4 на накапливающий сумматор 6 .к содержимому последнего прибавляется число, установленное в кодирующем переключателе 8, а при поступлении каждого импульса с ключа 5 к содержимому накапливающего сумматора 7 прибавляется величина, установленная в кодирующем переключателе 9. Таким образом, содержимое накапливающих сумматоров 6 и 7 представляет собой оценки номинального и действительного углов поворота конечного звена передачи. Подав сигналы с их выходов соответственно на вычитающий и суммирующий входы блока 11 алгебраического сложения, на выходе последнего получим оценку сигнала кинематической погрешности.
С выхода датчика 1 угла поворота начального звена импульсы поступают /также и на умножитель 14 частоты, выход которого подключен к накапливающему сумматору 12. В накапливающем сумматоре 12 при постзгплении каждого импульса к содержимому прибавляется число, установленное в кодирующем переключателе 8, а в момент поступления короткого импульса с датчика 1 угла поворота начального звена на установо ньй вход накапливающий сзгмматор 6 устанавливаетсй в нулевое состояние. .
Аналогично по каждому импульсу, поступающему с умножителя 15 частоты, к содержимому накапливающего сумматора 13 прибавляется число, установленное в кодирующем переключателе 9, в момент прихода короткого импульса с датчика 2 угла поворота конечного накапливаниций сумматор 13. устанавливается в нулевое, состояние.
t , . . - . Выходы накапливающих сумматоров 12 и 13 подключены к блоку 11 алгебраического сложения, который работает так, что содержимое накапливающего сумматора 7 суммируется с содержимым накапливаницего сумматора 13, уменьшенным в К2 раз, а из полученного результата вычитается сумма содержимогонакапливающего сумматора 6 с содержимьм накапливающего сумматора 12 уменьшенным в К1 раз.
Использование изобретения позволяет отказаться от применения восстанавливающих фильтров низких частот, что исключает дополнительную обработку и тем самым повьшает производительность контроля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля кинематической погрешности зубчатых передач | 1983 |
|
SU1120158A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1984 |
|
SU1231398A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1984 |
|
SU1180683A1 |
| Устройство для измерения мертвого хода зубчатых передач | 1987 |
|
SU1428910A1 |
| Устройство для анализа кинематической погрешности зубчатых передач | 1984 |
|
SU1227945A1 |
| Способ контроля кинематической погрешности зубчатых передач | 1980 |
|
SU945637A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1981 |
|
SU1024699A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1984 |
|
SU1237902A1 |
| Асинхронный следящий привод | 1979 |
|
SU877469A1 |
| Устройство для контроля и управления роторным экскаватором | 1984 |
|
SU1208135A1 |
УСТРОЙСТВО ДЛЯ КОНТРОЛЯ КИНЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ ЗУБЧАТЫХ ПЕРЕДАЧ, содержащее импульсные датчики углов поворота начального и конечного звеньев контролируемой передачи, к .каждому из которвлх первыми входами подключены ключи, первый и второй некапливающие сз мматоры, соединенные первыми входами с выходом ключей, два кодирующих переключателя. подключенные к вторьм входам первого и второго накапливающих Сумматоров, блок управления, один выход которого соединен с третьими входами первого и второго накапливающих сумматоров, a второй выход -с вторьми входами ключей, и блок алгебраического .сложения, входы которого соединены с выходами первого и второго накапливающих сумматоров, отличающееся тем, 4to, с целью повьшения производительности контроля, оно снабжено третьим и четвертым накапливающими сумматорами, первые входы которых через умножители частоты соединены соответственно с датчиками начального и конечного звеньев, вторые входы - соответственно с первым и вторым кодирующими переключателями, .третьи входы третьего и четвертого накапливающих сумматоров соответственно с датчиками начального и конечного звеньев, выходы третьего и четвертого накапливающих сумN9 маторов подключены к входам блока 00 алгебраического сложения.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ионак В.Ф | |||
| Приборы кинематического контроля | |||
| М., Машинострое1981, с | |||
| Насос | 1917 |
|
SU13A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ контроля кинематической погрешности зубчатых передач | 1980 |
|
SU945637A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
